Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Tema 3: Sensores L. Enrique Sucar Alberto Reyes ITESM Cuernavaca
Robótica Inteligente Tema 3: Sensores L. Enrique Sucar Alberto Reyes ITESM Cuernavaca

2
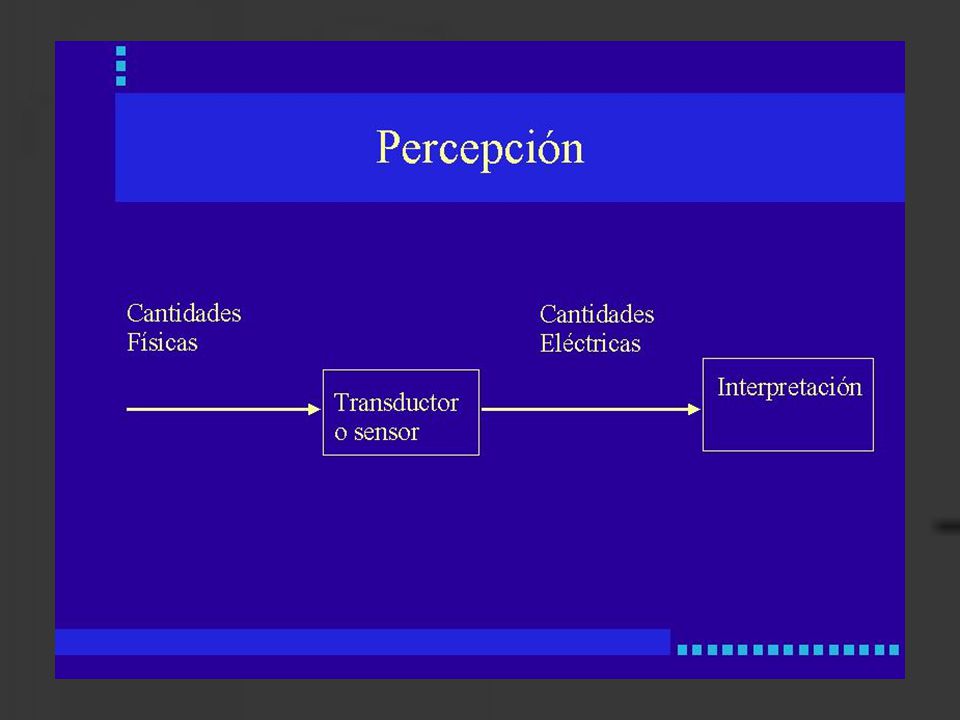
Sensores Introducción Tipos –cantidad física: Tipos –función: Luz
Fuerza Sonido Posición y orientación Tipos –función: Proximidad y rango Tactil Estado interno

3
Introducción Los sensores permiten al robot percibir su medio ambiente y su estado interno Dos tipos básicos: Sensores de estado interno Sensores de estado externo Desde otro punto de vista se pueden clasificar en: Activos: emiten energía o modifican el ambiente Pasivos: reciben energía pasivamente

5
Consideraciones generales
Campo de vista Rango de operación Exactitud y resolución Velocidad (operación en tiempo real) Requerimientos computacionales Potencia, peso y tamaño Robustez (redundancia)
 Requerimientos computacionales. Potencia, peso y tamaño. Robustez (redundancia)")
6
Consideraciones generales
Los sensores reales son ruidosos Los sensores regresan una descripción incompleta del ambiente No hay un modelo completo de los sensores

7
Sensitividad Grado de cambio de la señal de salida del sensor en función del cambio de la señal física medida: Dr / r = S [Dx / x] r – señal del sensor x – cantidad medida S – sensitividad

8
Rango

9
Tipos – cantidad física:
Luz Fuerza Sonido Posición y orientación

10
Sensores de Luz Perciben la luz, ya sea en el rango visible o en el infrarrojo Tipos: Fotoceldas Fotoresistencias Fototransisitores Fotodiodos Laser Cámasras

11
Fotoresistencias

12
Fototransistores

13
Telémetro laser Emite energía láser en una secuencia de impulsos cortos Se mide el tiempo en que tarda en regresar la luz reflejada por el objeto Se calcula la distancia al objeto Ejemplo: láser Sick: 360 lecturas cada ½ grado – 180 grados Cada 1/10 de segundo Alcance de 50 m con resolución de 5 cm

14
Cámaras Tipos de luz: Cámaras: Visible Infrarroja
Manocromáticas / color Analógicas / digitales Pasivos / activos (puntos, línea láser)
")
15
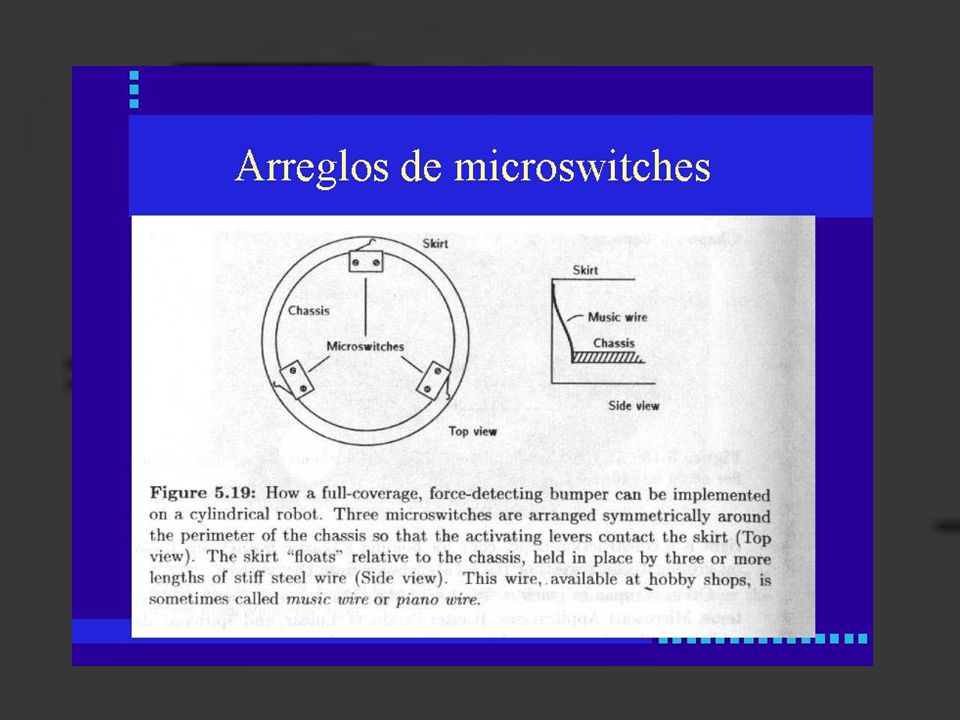
Sensores de fuerza Micro-interruptores “bigotes” Acelerómetros
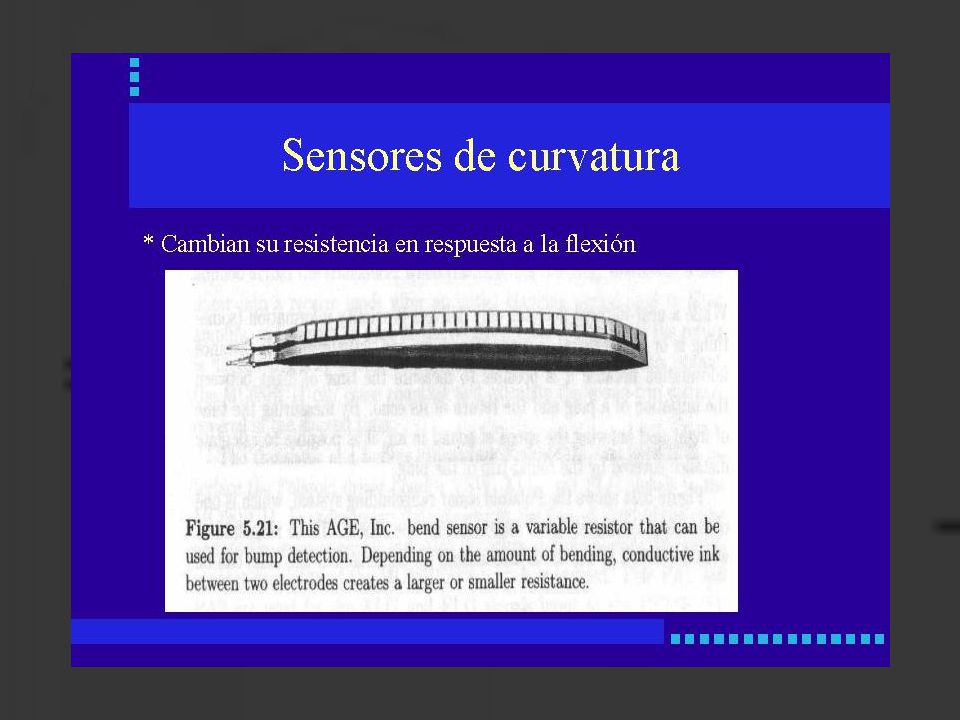
Sensores de curvatura

18
Sonidos Micrófonos – trabajan con frecuencias audibles
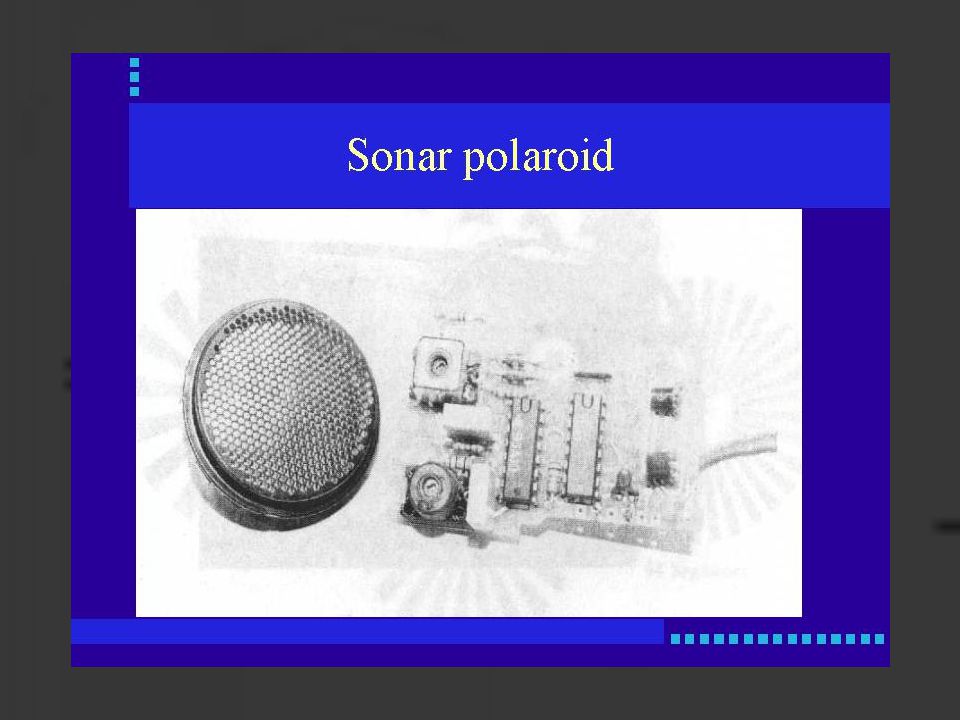
Sensor de película piezoeléctrica – producen un voltaje cuando hay cambios en la cantidad medida (vibración, temperatura, ...) Sonar – miden el tiempo que tardan en recibir un sonido (no audible) emitido
 Sonar – miden el tiempo que tardan en recibir un sonido (no audible) emitido.")
20
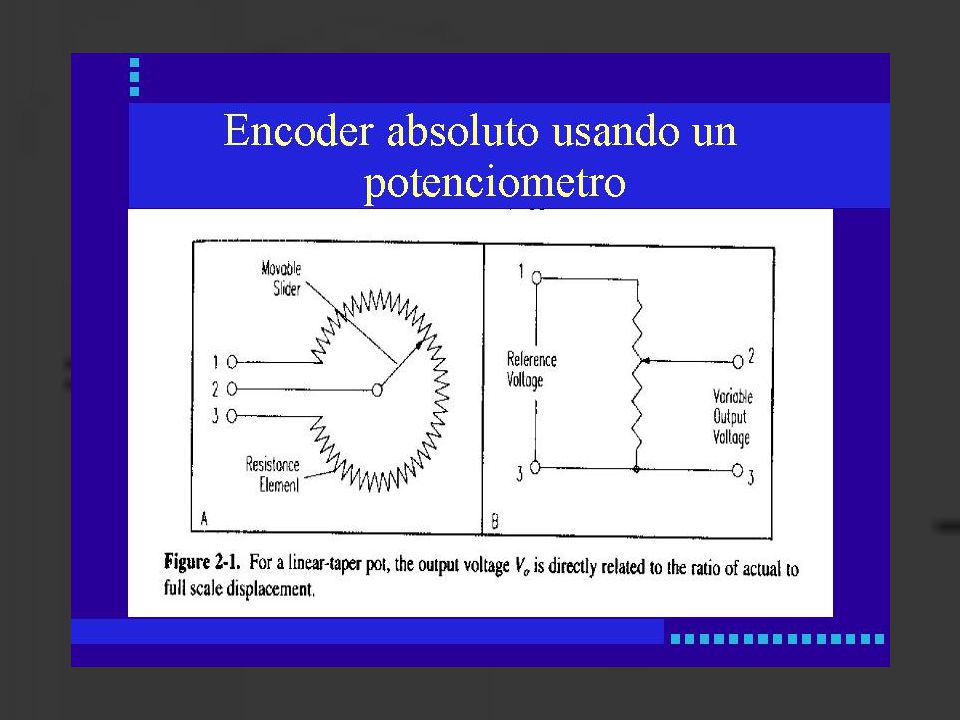
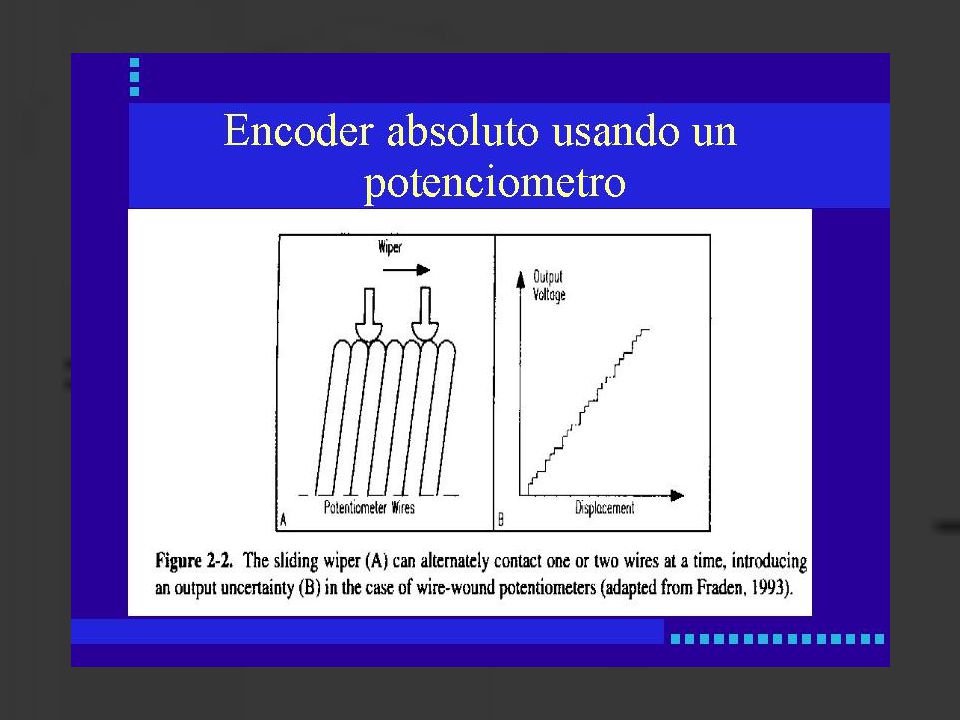
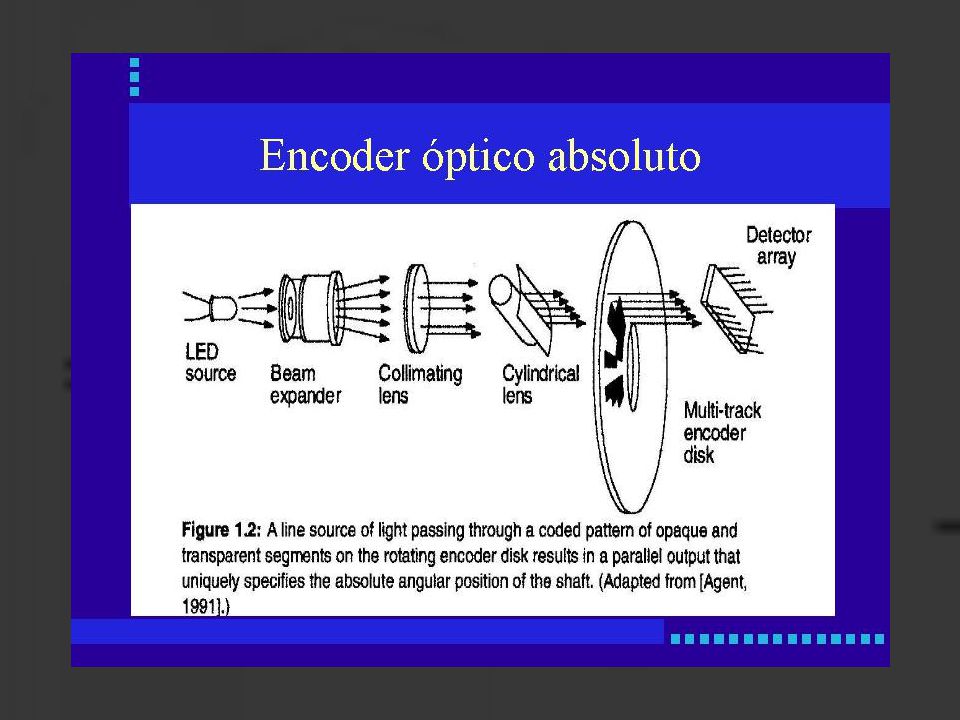
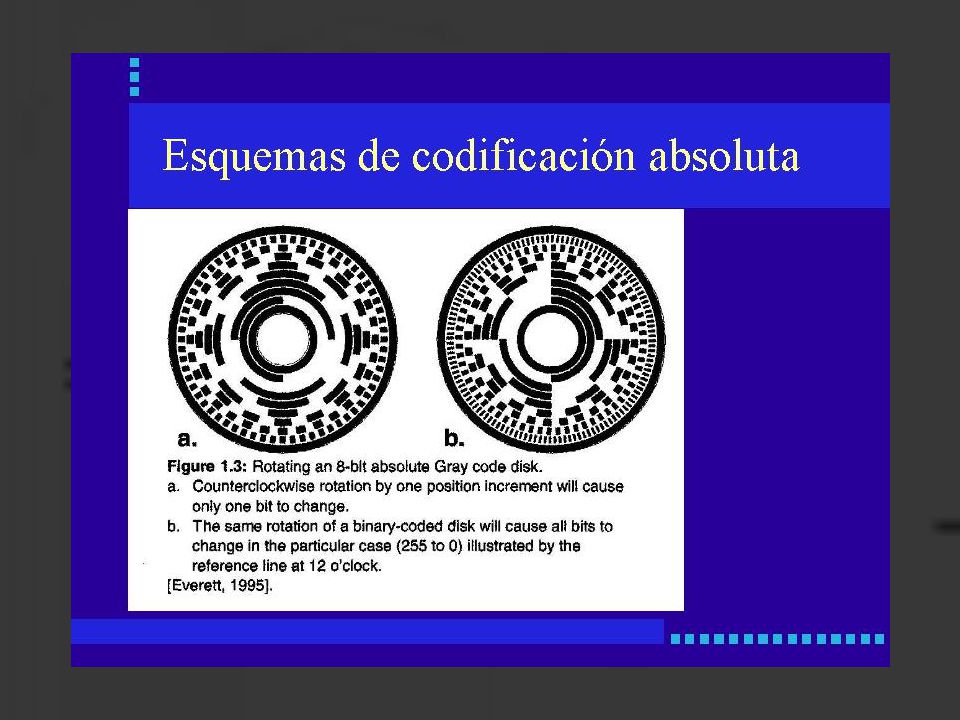
Sensores de posición y orientación
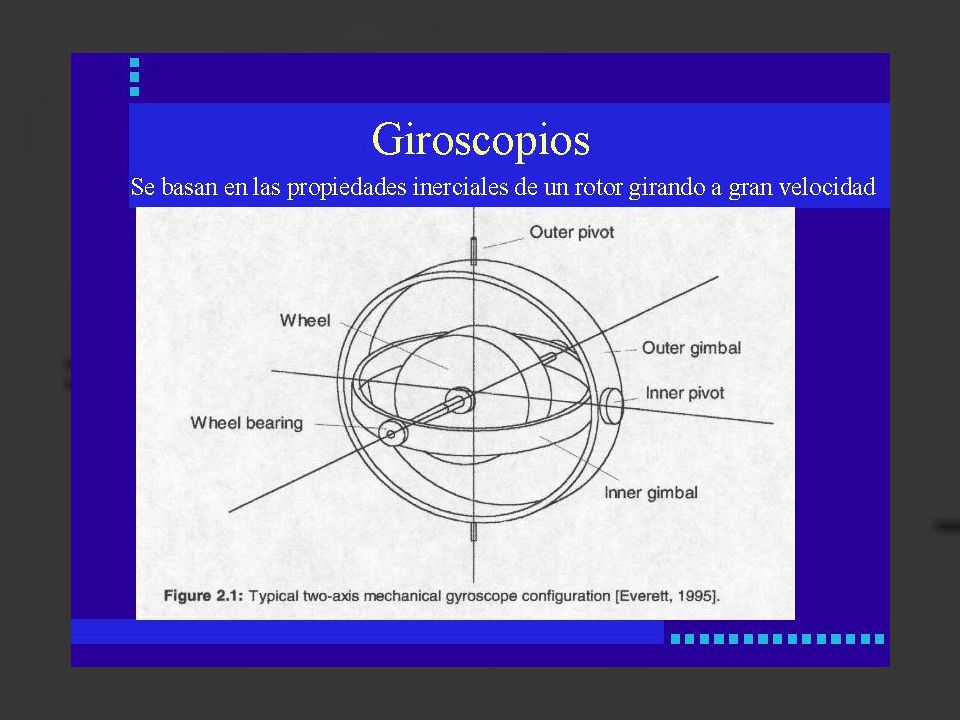
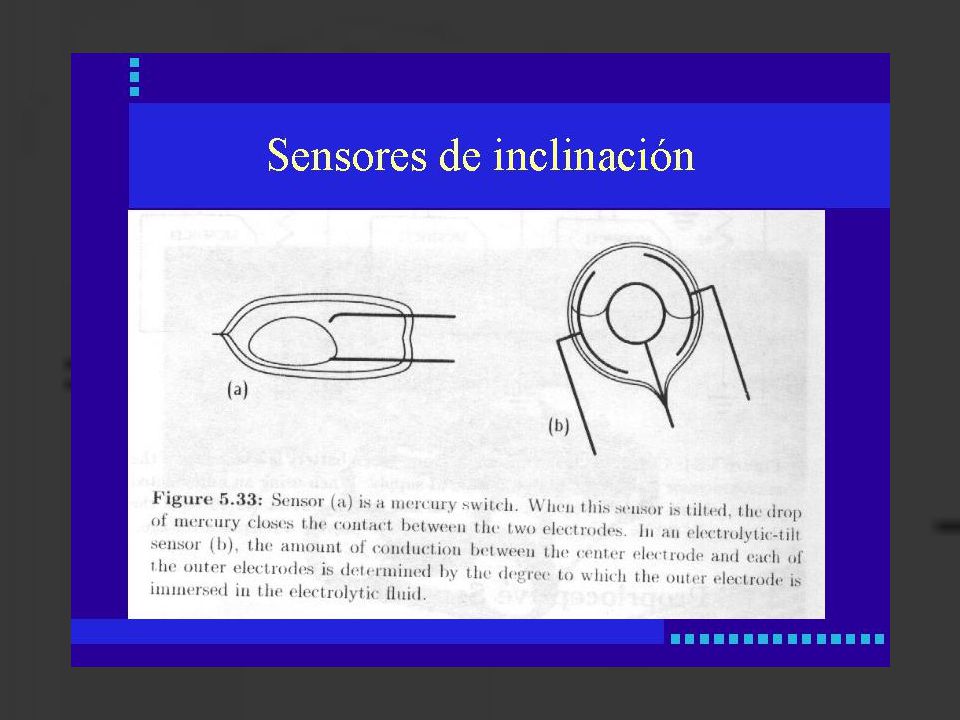
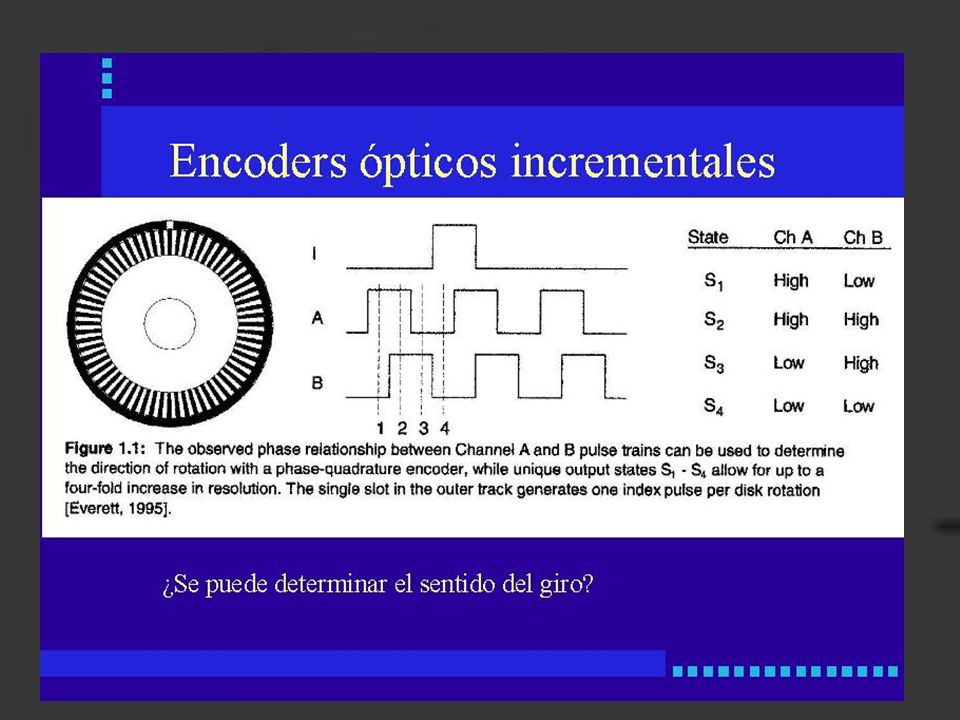
Odometría Encoders Incrementales / absolutos Navegación inercial Giroscopios Inclinación Acelerómetros Brújula

24
Proximidad y rango Táctil Estado interno
Tipos – función: Proximidad y rango Táctil Estado interno

25
Sensores de proximidad
Permiten inferir la distancia a objetos en el ambiente: Cercanos: Infrarrojos Lejanos Sonares Láser

26
Infrarrojos Mediante la emisión y detección de luz infrarroja permiten la detección de obstáculos cercanos Tipos: binario / distancia Rango: pocos cm a metros Problemas: Interferencia de luz ambiental Depende del color/propiedades de las superficies

27
Infrarojos

28
Infrarojos

29
Infrarojos

30
Infrarojos

31
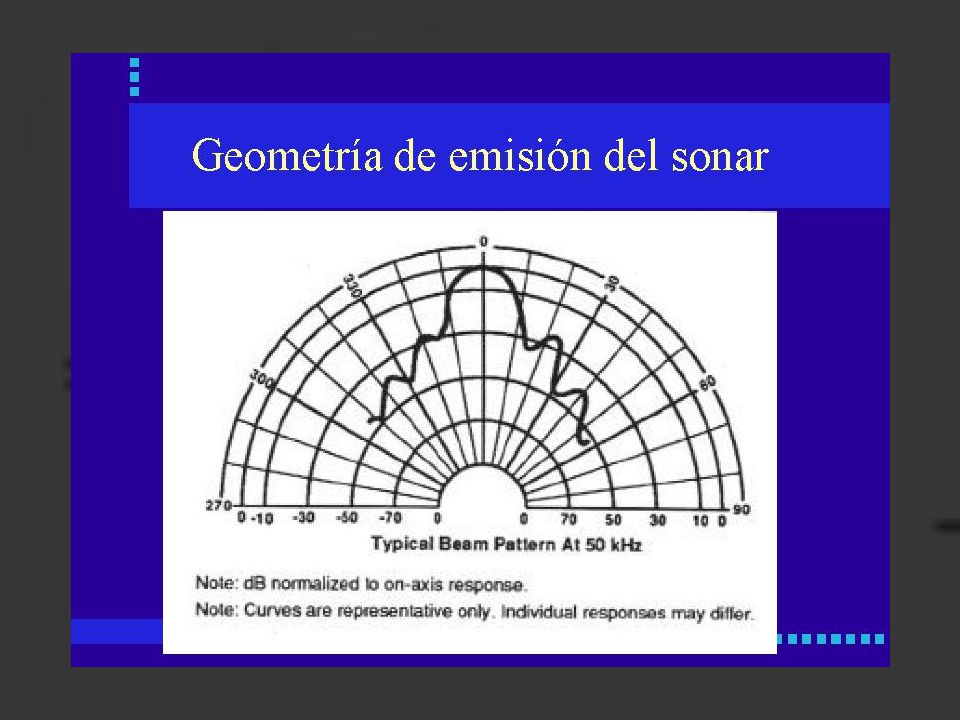
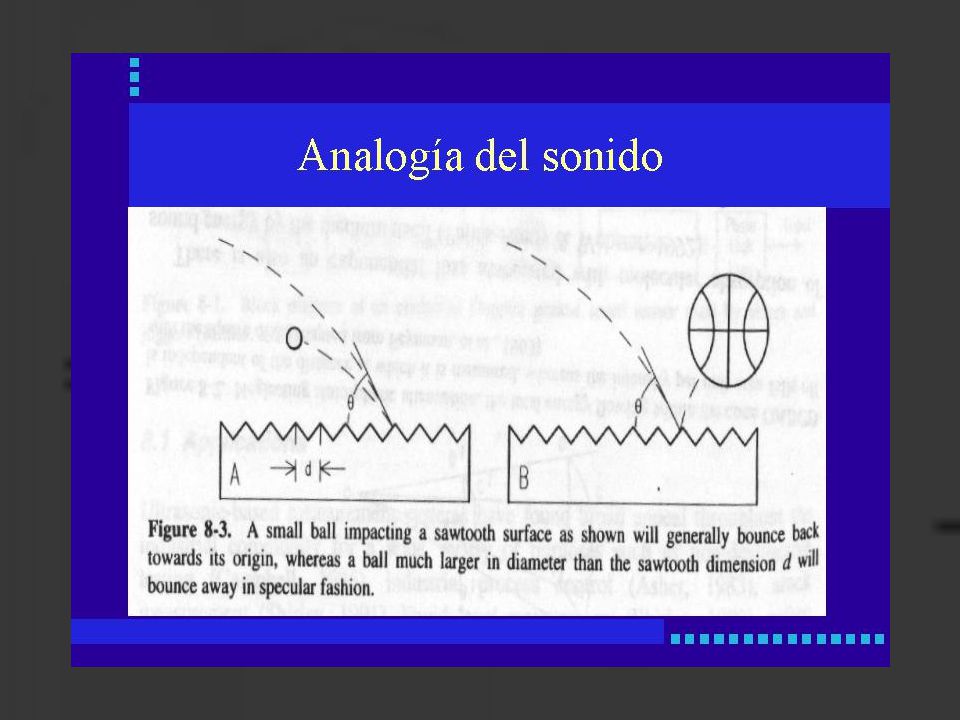
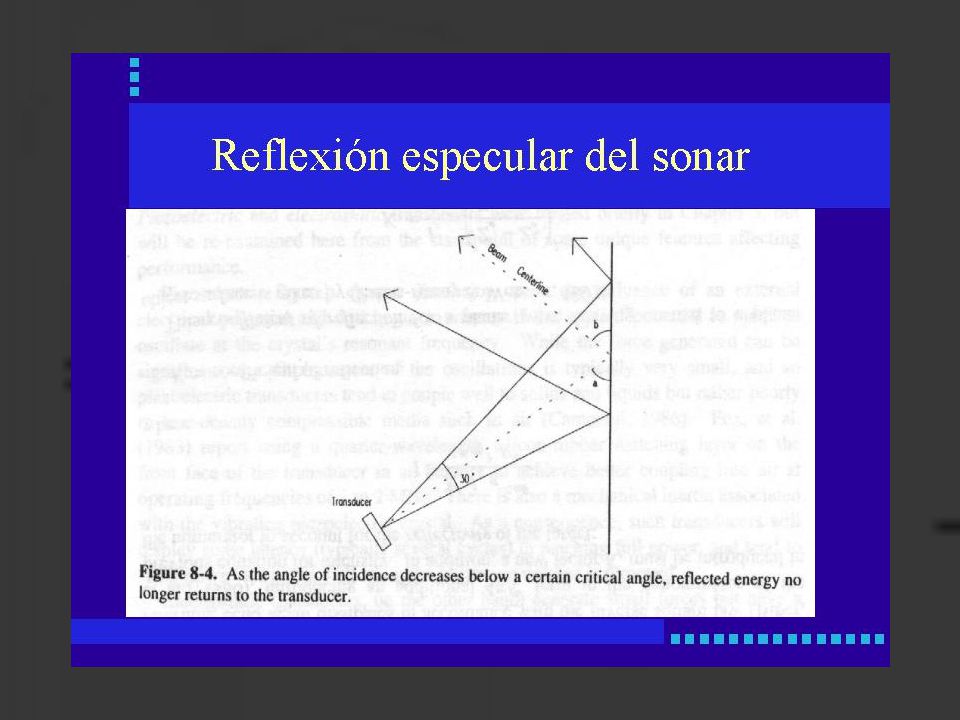
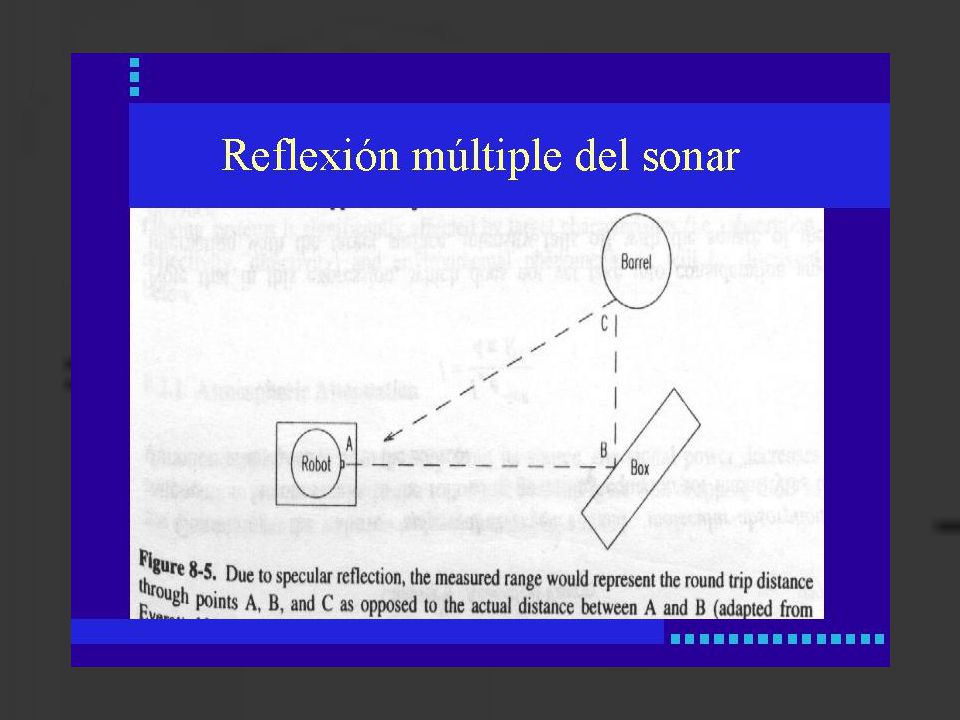
Sonares Detectan obstáculos mediante la emisión de ultrasonido y detección del tiempo de retorno Rango: aprox. 10/20 cm a 5 m Problemas: Patrón de emisión Depende del tipo de superficie Múltiples reflexiones

36
Arreglos de Sonares Normalmente se combinan varios sonares para tener un rango mayor y redundancia. Algunos arreglos comunes: 1 sonar giratorio Varios sonares al frente 1 anillo de sonares (12, 16, ...) 2 anillos de sonares a diferente altura Sonares apuntando arriba y/o abajo
 2 anillos de sonares a diferente altura. Sonares apuntando arriba y/o abajo.")
37
Arreglos de Sonares

38
Telémetro laser Otro método para estimar la distancia a obstáculos, con mayor rango y mejor precisión que los sonares Tres métodos alternativos: Triangulación – relación geométrica entre el haz emitido y el haz recibido Tiempo de vuelo – tiempo de regreso del haz Basado en fase – diferencia de fase entre el haz emitido y el haz reflejado

39
Telémetro laser

40
Apuntador laser con cámara
Una alternativa más económica al telémetro laser es el usar una apuntador láser (punto o línea) combinado con una cámara La distancia al obstáculo se estima en base a la altura del punto o línea en la imagen y relaciones geométricas
 combinado con una cámara. La distancia al obstáculo se estima en base a la altura del punto o línea en la imagen y relaciones geométricas.")
41
Apuntador laser con cámara

42
Sensores de Contacto Permiten al robot detectar cuando hace contacto con los obstáculos Se usan principalmente para evitar daño al robot como último recurso (también se utilizan en manos robóticas) Dos formas de uso: Como otro sensor que va al computador del robot Conectado directamente al circuito de control de los motores de forma que detenga automáticamente al robot
 Dos formas de uso: Como otro sensor que va al computador del robot. Conectado directamente al circuito de control de los motores de forma que detenga automáticamente al robot.")
43
Sensores de Contacto Principales tipos:
Bumpers: microswitches en un arreglo alrededor del robot Materiales que cambian la resistencia o capacitancia al acercarse a un obstáculo “Bigotes” Sensores de Curvatura Medidores de corriente en los motores

44
Sensores internos Permiten al robot conocer su estado interno.
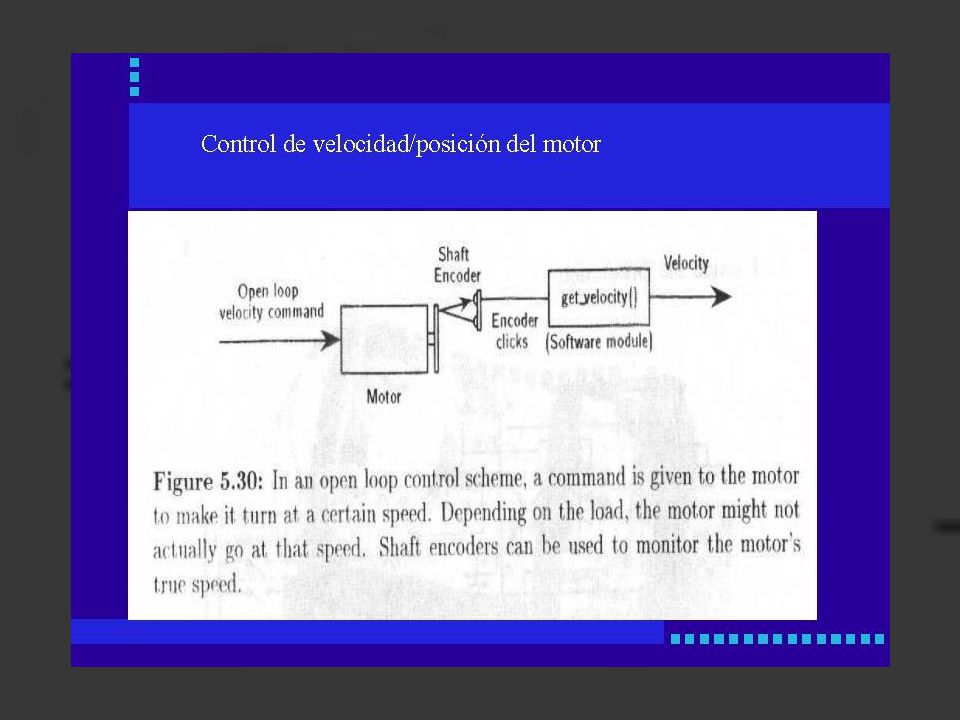
Entre los más comunes están Encoders – permiten determinar la posición absoluta o relativa del robot en función del movimiento de las ruedas (odometría) Brújulas – permiten estimar en forma aproximada la orientación del robot Giroscopios, acelerómetros, GPS Medidores de energía, corriente de motores, temperatura
 Brújulas – permiten estimar en forma aproximada la orientación del robot. Giroscopios, acelerómetros, GPS. Medidores de energía, corriente de motores, temperatura.")
51
Modelo del Sensor El modelo de un sensor provee una relación matemática entre la propiedad de interés (e) y la lectura del sensor (r) r = f (e) El modelo debe incluir la relación del dispositivo físico y el ruido debido al sensor mismo (interno) y al medio ambiente (externo)
 El modelo debe incluir la relación del dispositivo físico y el ruido debido al sensor mismo (interno) y al medio ambiente (externo)")
52
Modelo del Sensor r ruido e

53
Referencias [Jones, Flynn] – Cap 5 [Dudek y Jenkin] – Cap 2
H.R. Everett, “Sensors for mobile robots”, A K Peters, 1995.
![Referencias [Jones, Flynn] – Cap 5 [Dudek y Jenkin] – Cap 2](http://slideplayer.es/slide/3746353/12/images/53/Referencias+%5BJones%2C+Flynn%5D+%E2%80%93+Cap+5+%5BDudek+y+Jenkin%5D+%E2%80%93+Cap+2.jpg "H.R. Everett, Sensors for mobile robots , A K Peters,")
54
Actividades Hacer prácticas de sensores en el laboratorio virtual
Seleccionar categoría: Rescate (lego) Pirámide (abierta) Laberinto (abierta) Seleccionar plataforma: Lego Híbrida (Lego + PDA)
 Pirámide (abierta) Laberinto (abierta) Seleccionar plataforma: Lego. Híbrida (Lego + PDA)")
Presentaciones similares


>")

















