Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Ing. Serafin Castañeda Cedeño.
Diseño Mecatrónico

2
SOLUCIONES SECUNDARIAS PROBLEMAS SECUNDARIOS
PROBLEMA GENERAL SOLUCION GENERAL MEJORA DE DETALLES CLARIFICACION DE OBJETIVOS ESTABLECIMIENTO DE FUNCIONES EVALUACION DE ALTERNATIVAS DETERMINACIONDE LAS CARACTERISTICAS FIJACION DE REQUERIMIENTOS GENERACION DE ALTENATIVAS SOLUCIONES SECUNDARIAS PROBLEMAS SECUNDARIOS

3
ESTRUCTURA DE TAREAS (CONTROL DE VELOCIDAD DE UN MOTOR C.D.).
.")
4
ESTRUCTURA DE TAREAS (CALENTADOR).
.")
5
ESTRUCTURA DE TAREAS (TOSTADOR).
.")
6
ESTRUCTURA DE TAREAS .

7
ALMACENAMIENTO DE DATOS
USUARIO: POSICION DESEADA REPORTES EXTERNO INTERNO INTERFAZ ALMACENAMIENTO DE DATOS CONTROL CON RETROALIMENTACION SOFTWARE INTERPRETAR SEÑAL SEÑAL COMANDADA ACONDICIONADOR DE SEÑAL HARWARE AMPLIFICADOR DE SEÑAL SENSOR ACTUADOR

8
PROCEDIMIENTO PARA EL DESARROLLO DEL CONTROL:
Obtener el modelo matemático como una función de transferencia o en variable de estado. Determinar una configuración del sistema. Transformar el sistema físico en diagrama Diseñar el controlador y probar para ver si cumple con los requerimientos. Analizar el sistema modelo para obtener las especificaciones.

11
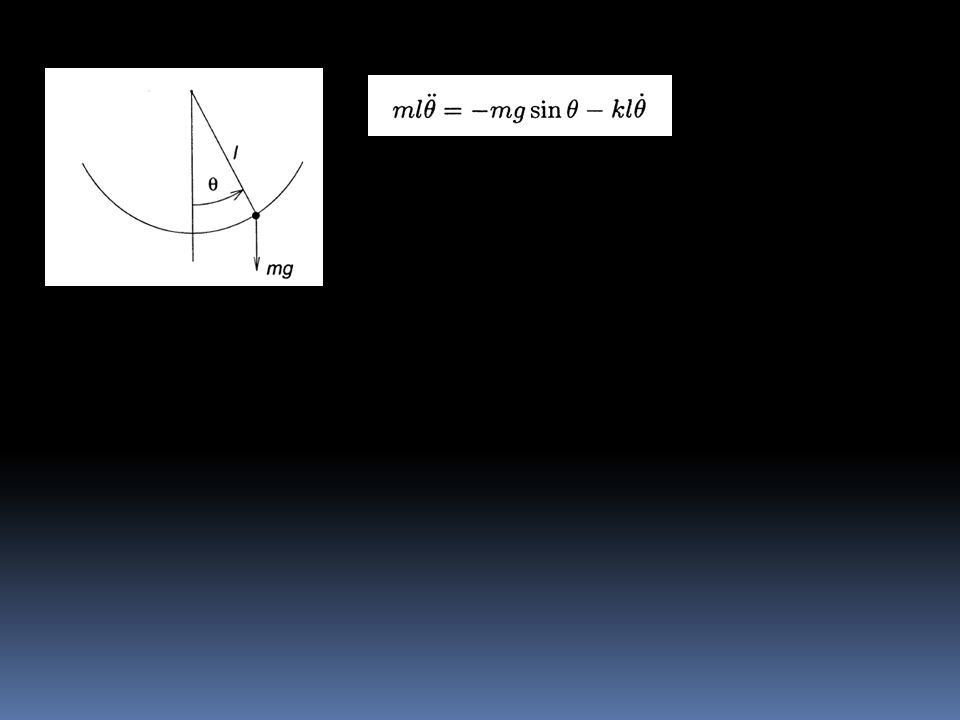
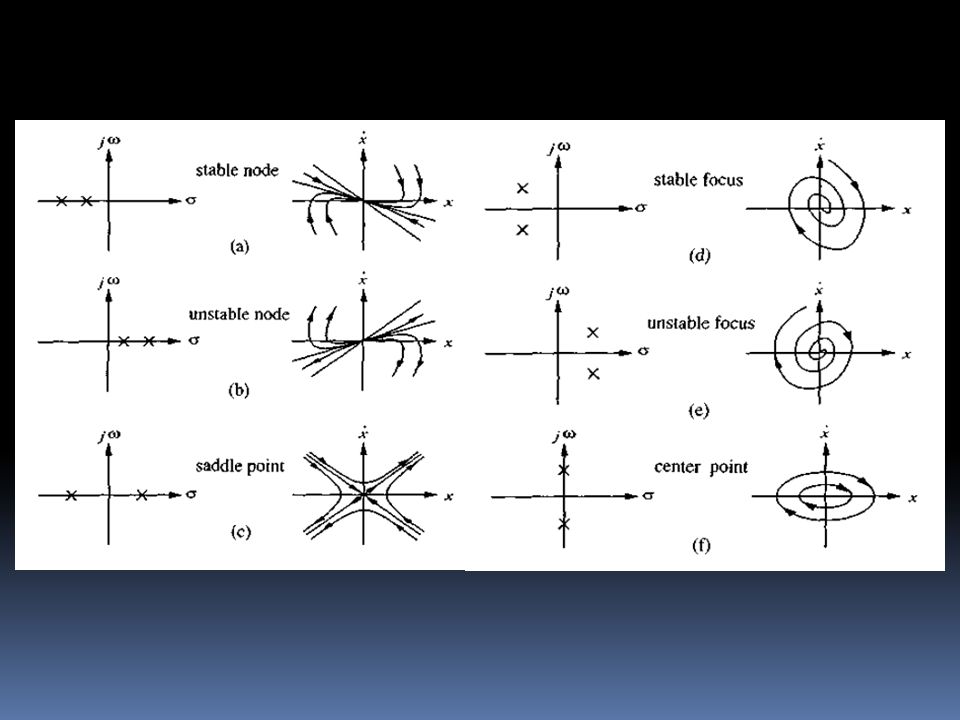
Diagrama de fase de un sistema No Lineal
Péndulo modelo.vi

12
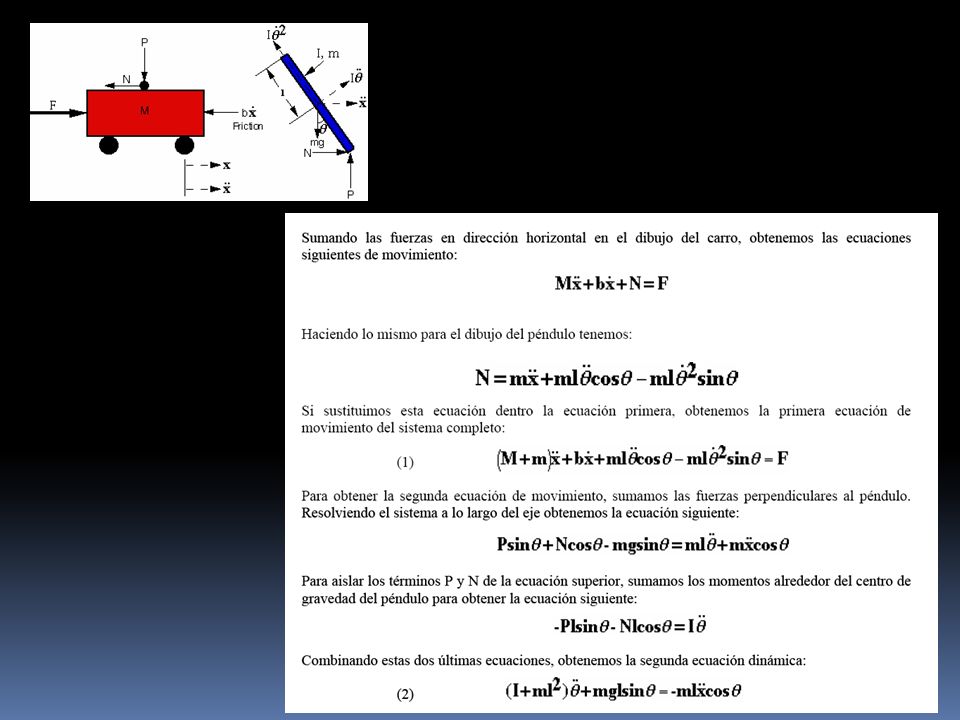
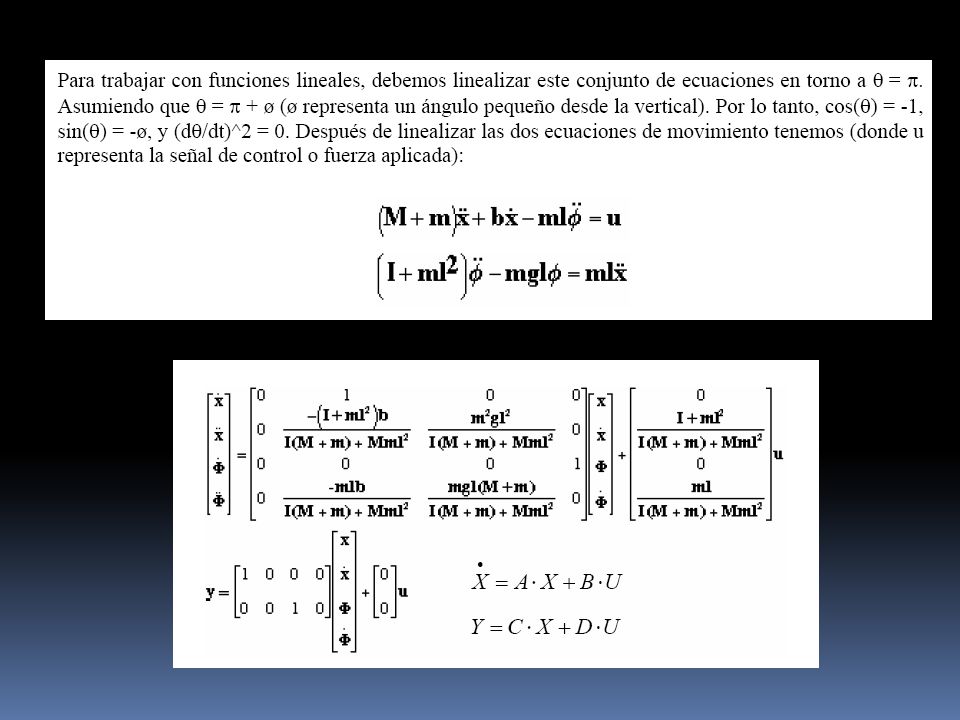
Modelo del péndulo invertido.

15
Estabilidad. Controlabilidad. Observabildad. Análisis péndulo.vi Análisis péndulo.vi

16
Modelado de un motor de DC
¿Que es caracterizar? Realizar algunos experimentos sobre la Planta (objeto a controlar) con el fin de conocer los valores de los parámetros que intervienen en su modelo matemático. En este caso, la Planta a considerar es el motor de corriente directa y el objetivo de determinar el valor de los parámetros que intervienen en su modelo matemático es realizar simulaciones numéricas, ya sea para realizar algunos análisis de ese modelo, para el diseño de un sistema de control de posición o velocidad o para incorporarlo a la simulación de un sistema más grande.
 con el fin de conocer los valores de los parámetros que intervienen en su modelo matemático. En este caso, la Planta a considerar es el motor de corriente directa y el objetivo de determinar el valor de los parámetros que intervienen en su modelo matemático es realizar simulaciones numéricas, ya sea para realizar. algunos análisis de ese modelo, para el diseño de un sistema de control de posición o velocidad o para incorporarlo a la simulación de un sistema más grande.")
17
Pruebas para identificación de parámetros de un motor de DC
R = Resistencia de Armadura Ka = Constante que relaciona el Par y la corriente Kb = Constante que relaciona FCEM y la velocidad angular J = Carga o Momento de Inercia

18
Pruebas de caracterización.
1. Prueba a rotor bloqueado 2. Prueba a rotor libre 3. Prueba de la respuesta escalón.

19
1. Prueba a rotor bloqueado.

20
2. Prueba a rotor libre

21
3. Prueba de la respuesta escalón.

22
Prototipo. Continuous Transfer Function.vi Análisis Motor DC. Vi
Diseño de un control K

24
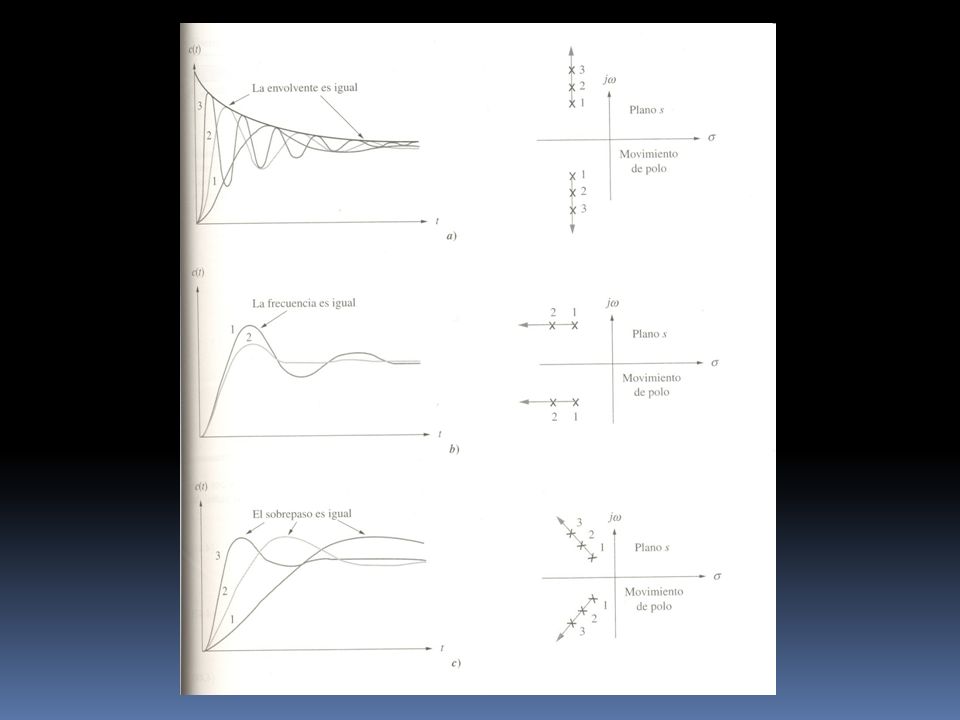
Respuestas en el tiempo.
¿Donde colocar los polos? La respuesta de los sistemas, depende de la localización de los polos.

27
Respuesta de sistemas con polos adicionales.
El polo adicional, está cerca de los polos dominantes. El polo adicional está lejos de los polos dominantes. El polo adicional está en el infinito. Entre más lejos el polo, el sistema responde más rápido.

28
Respuesta del sistema con ceros.
Un cero se ve como un factor de ganancia y no cambia las amplitudes relativas de la respuesta.

Presentaciones similares