Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Tema 4 Selección de Métodos robustos aplicados en algunos problemas fotogramétricos

2
Determinación de la situación relativa de los haces
MÉTODOS ROBUSTOS SELECCIONADOS PARA SU APLICACIÓN EN EL PROBLEMA DE LA ORIENTACIÓN RELATIVA ANALÍTICA Determinación de la situación relativa de los haces Reconstrucción de la toma fotográfica Formación del Modelo Estereoscópico

3
MÉTODOS ROBUSTOS SELECCIONADOS PARA SU APLICACIÓN EN EL PROBLEMA DE LA ORIENTACIÓN RELATIVA ANALÍTICA

4
BASE MATEMÁTICA DE LA ORIENTACIÓN RELATIVA ANALÍTICA
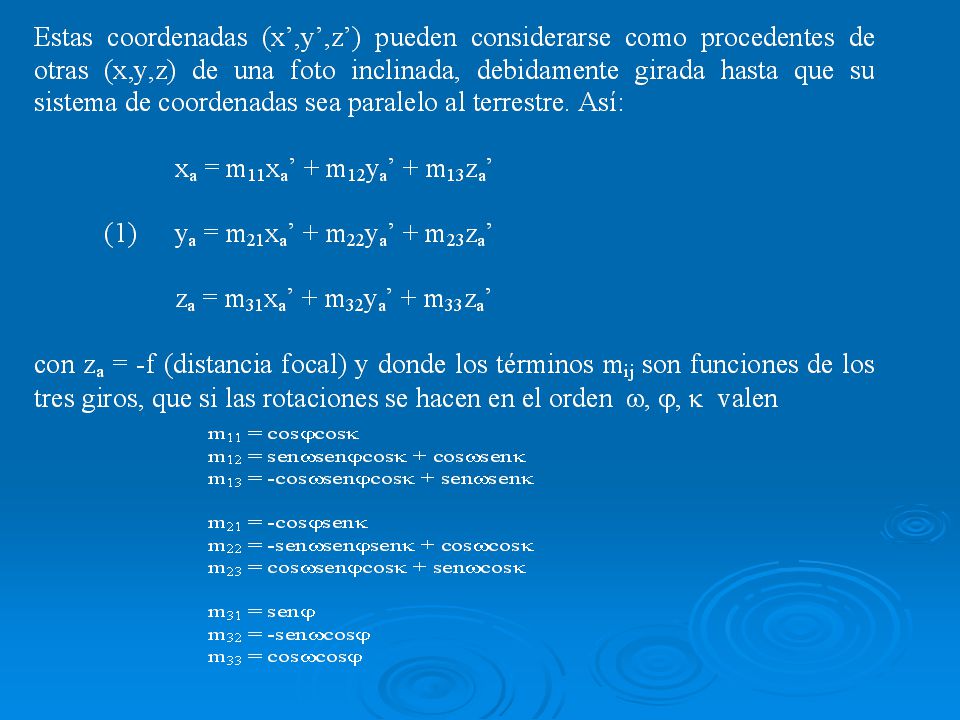
La orientación relativa analítica se consigue imponiendo la condición de que los rayos homólogos se intersecten en un punto, lo cual se consigue escribiendo las ecuaciones de colinearidad en ambas fotos para, al menos cinco puntos objeto. La intersección de los rayos correspondientes se obtiene de forma automática porque las ecuaciones para ambas fotos para un punto objeto dado contienen las mismas coordenadas terreno para ese punto L1a1A y L2a2A . El sistema de ecuaciones de ecuaciones de colinearidad que se forma contiene cinco incógnitas de los elementos de la orientación externa de la foto 2(2, 2, 2, YL2 , ZL2 ) más tres coordenadas desconocidas (X,Y,Z) para cada punto objeto.
 más tres coordenadas desconocidas (X,Y,Z) para cada punto objeto.")
6
vx = b11d + b12d + b13d - b14dXL - b15dYL - b16dZL +
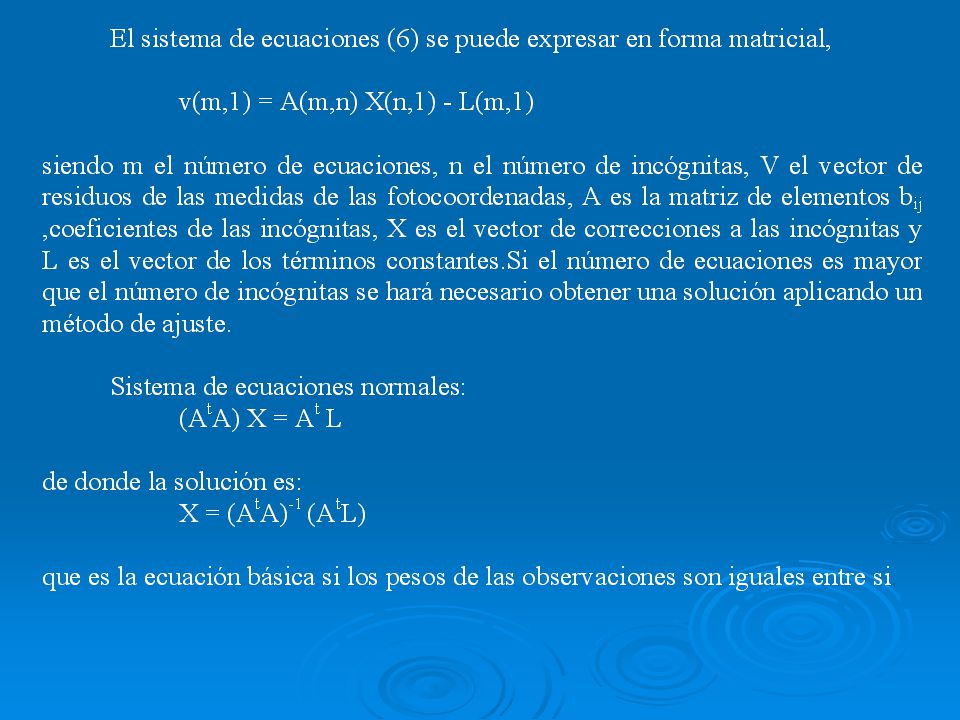
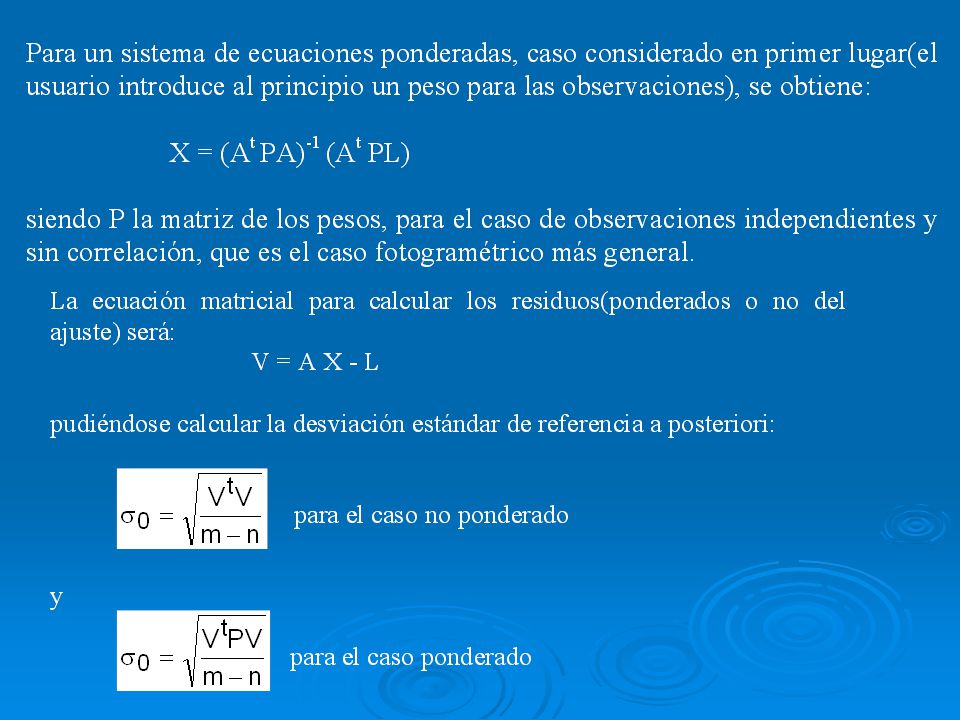
Una vez linealizadas dichas ecuaciones y planteadas como ecuaciones de observación de un proceso de ajuste de tipo paramétrico(dos por cada punto) vx = b11d + b12d + b13d - b14dXL - b15dYL - b16dZL + + b14 dX + b15dY+ b16dZ + J vy = b21d + b22d + b23d - b24dXL - b25dYL - b26dZL + + b24 dX + b25dY+ b26dZ + K
 vx = b11d + b12d + b13d - b14dXL - b15dYL - b16dZL + + b14 dX + b15dY+ b16dZ + J. vy = b21d + b22d + b23d - b24dXL - b25dYL - b26dZL + + b24 dX + b25dY+ b26dZ + K.")
11
APLICACIÓN DEL ESTIMADOR ROBUSTO MÍNIMA SUMA AL PROBLEMA DE LA ORIENTACIÓN RELATIVA NUMÉRICA
-Para poder establecer la potencia de la estimación robusta para poder resolver el problema de la detección de los errores graves o groseros(“blunders”) en los datos de entrada para un proceso de ajuste, se ha tratado de aplicar en primer lugar en el problema estudiado de la orientación relativa. -En este caso, como veremos más adelante, simularemos una serie de errores de este tipo en los datos observados, en este caso coordenadas imagen y analizaremos el resultado obtenido al aplicar el sistema clásico de ajuste mínimo cuadrático y una serie de estimadores robustos convenientemente manipulados. - En primer lugar analizamos el estimador robusto llamado de la mínima suma ya mencionado anteriormente. La alternativa planteada por dicho estimador es sustituir la función a minimizar, que para el método clásico es la suma de los residuos al cuadrado, por otra función, que en este caso es la suma de los valores absolutos de los residuos.
 en los datos de entrada para un proceso de ajuste, se ha tratado de aplicar en primer lugar en el problema estudiado de la orientación relativa. -En este caso, como veremos más adelante, simularemos una serie de errores de este tipo en los datos observados, en este caso coordenadas imagen y analizaremos el resultado obtenido al aplicar el sistema clásico de ajuste mínimo cuadrático y una serie de estimadores robustos convenientemente manipulados. - En primer lugar analizamos el estimador robusto llamado de la mínima suma ya mencionado anteriormente. La alternativa planteada por dicho estimador es sustituir la función a minimizar, que para el método clásico es la suma de los residuos al cuadrado, por otra función, que en este caso es la suma de los valores absolutos de los residuos.")
13
APLICACIÓN DEL MÉTODO DANÉS AL PROBLEMA DE LA ORIENTACIÓN RELATIVA NUMÉRICA
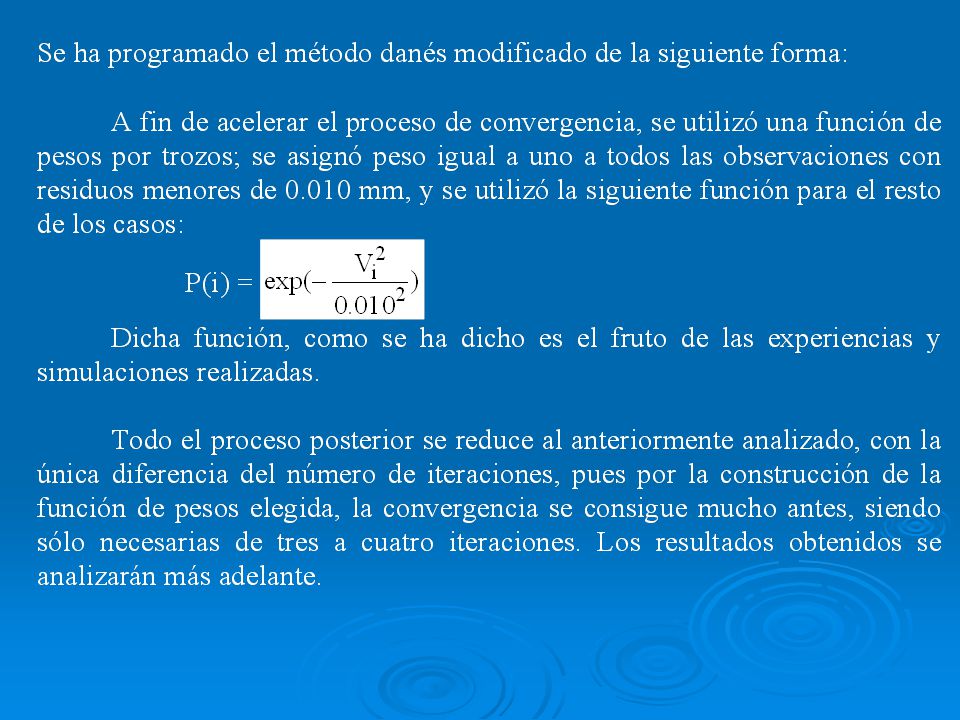
-El primer problema que plantea este algoritmo es que no existe un Método “general” Danés, por llamarlo de alguna forma. -Sino que dicho método ha de ser estudiado y modificado a las propias necesidades. Partiendo de la fórmula básica para la función de influencia y la función de pesos, se hicieron una serie de pruebas y experimentos simulados, hasta llegar al algoritmo más interesante para este caso.

15
APLICACIÓN DEL MÉTODO DE HUBER AL PROBLEMA DE LA ORIENTACIÓN RELATIVA NUMÉRICA

17
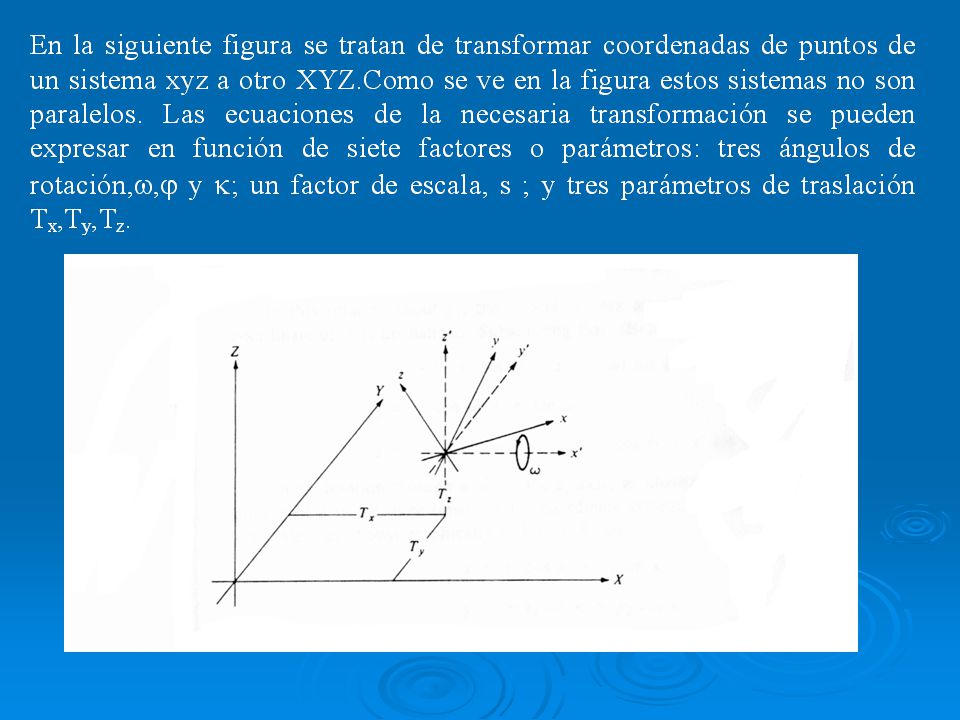
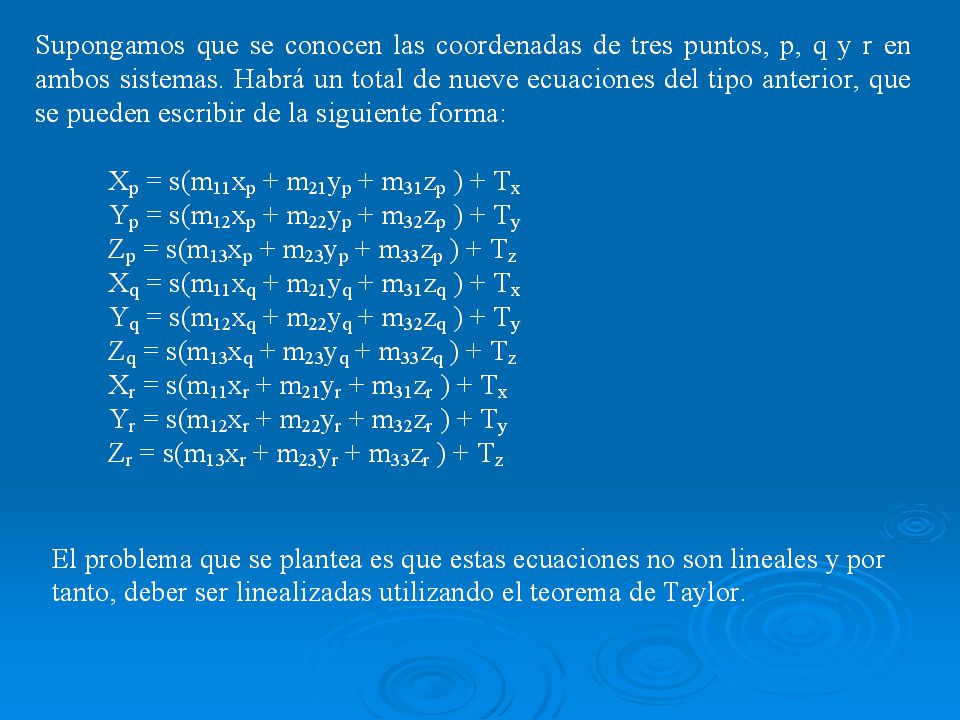
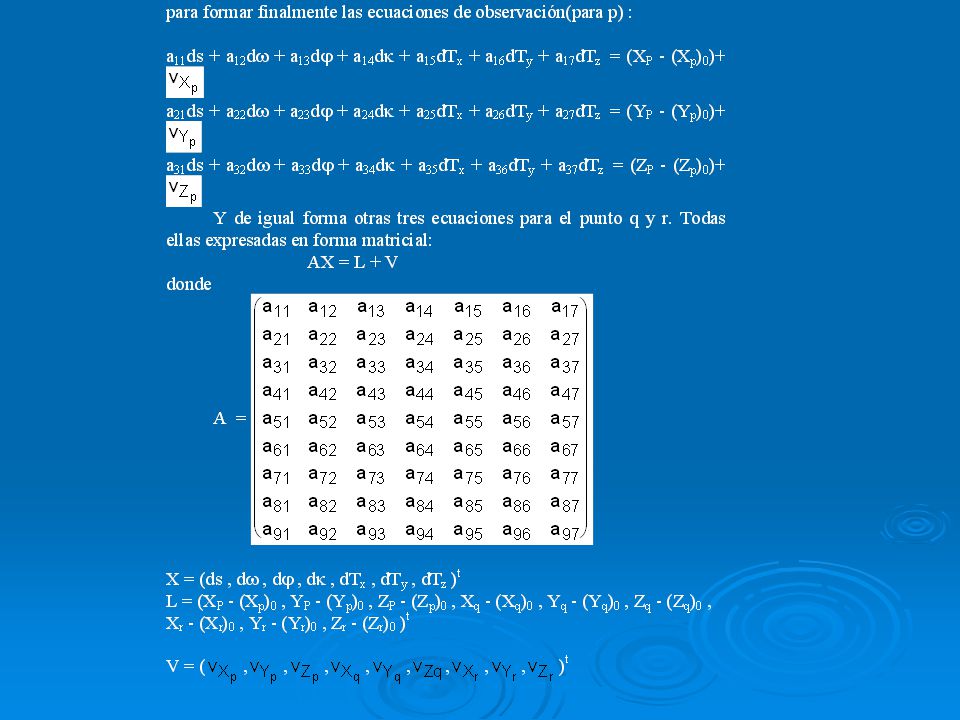
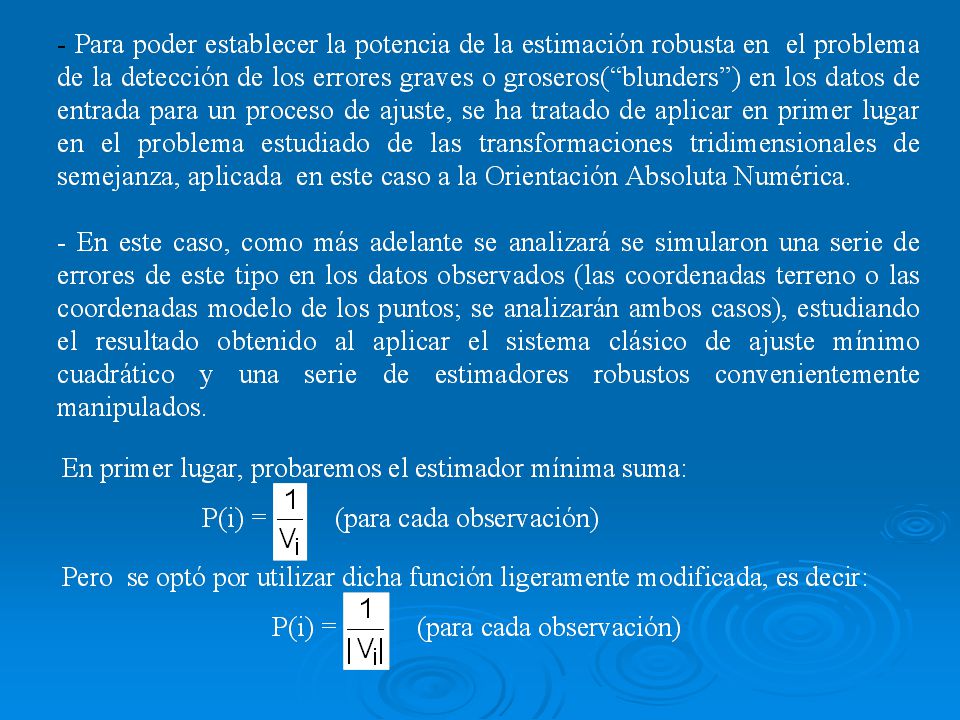
MÉTODOS ROBUSTOS SELECCIONADOS PARA SU APLICACIÓN EN EL PROBLEMA DE LA TRANSFORMACIÓN HELMERT TRIDIMENSIONAL

27
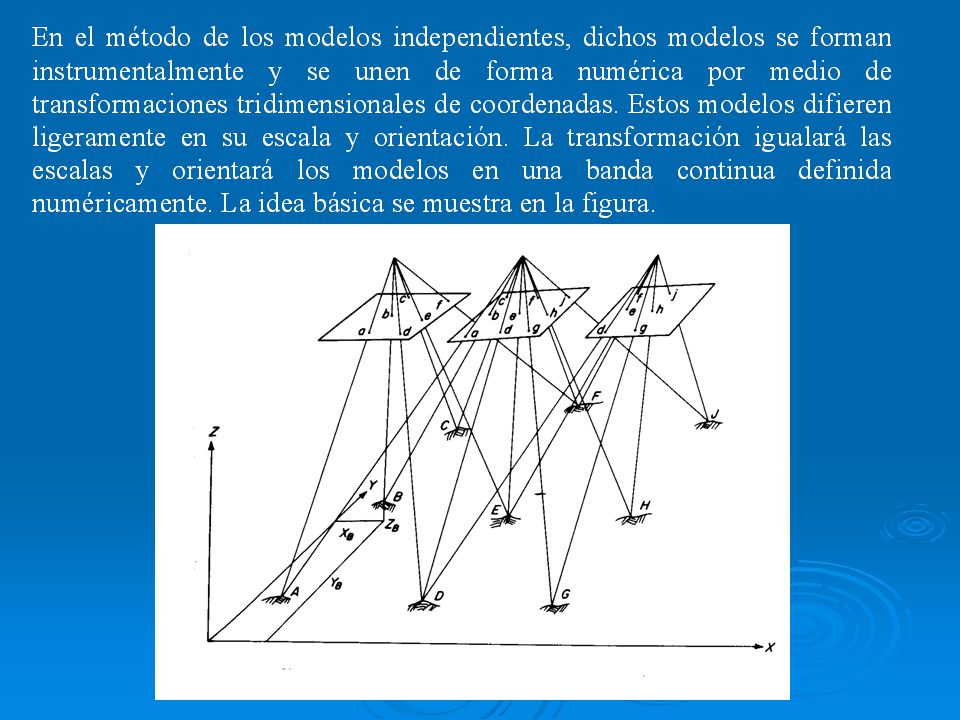
MÉTODOS ROBUSTOS SELECCIONADOS PARA SU APLICACIÓN EN EL PROBLEMA DEL CÁLCULO DE LAS COORDENADAS BANDA DENTRO DE LA AEROTRIANGULACIÓN ANALÍTICA UTILIZANDO EL MÉTODO DE LOS MODELOS INDEPENDIENTES

Presentaciones similares