Descargar la presentación
La descarga está en progreso. Por favor, espere

1
SISTEMAS ELECTRONICOS DIGITALES APLICACIONES CON MICROCONTROLADORES

2
Introduccion Los microcontroladores están conquistando el mundo. Están presentes en nuestro trabajo, en nuestra casa y en nuestra vida, en general Se pueden encontrar controlando el funcionamiento de los ratones y teclados, en los teléfonos, en los hornos microondas, etc Que es un Microcontrolador? Es un circuito integrado que incorpora los elementos necesarios para gobernar uno o varios procesos Es una computadora reducida a la minima expresion e integrada en un solo chip

3
Un microcontrolador dispone normalmente de los siguientes componentes:
CPU (Unidad Central de Proceso). Memoria RAM Memoria ROM/PROM/EPROM Líneas de E/S para comunicarse con el exterior Diversos módulos para el control de periféricos (Temporizador, Convertidor Analógico/Digital, Convertidor Digital/Analógico) Generador de pulsos de reloj que sincronizan el funcionamiento de todo el sistema.
. Memoria RAM. Memoria ROM/PROM/EPROM. Líneas de E/S para comunicarse con el exterior. Diversos módulos para el control de periféricos (Temporizador, Convertidor Analógico/Digital, Convertidor Digital/Analógico) Generador de pulsos de reloj que sincronizan el funcionamiento de todo el sistema.")
4
Diferencias Microprocesador. Contiene el CPU de una computadora.
Microcontrolador. Contiene todos los bloques que integran a una computadora

5
Arquitectura Von Newman
El CPU esta conectado a una memoria única que contiene las instrucciones del programa y los datos. El tamaño de la unidad de datos o instrucciones esta fijado por el ancho del bus de la memoria. Es decir que un microprocesador de 8 bits, que tiene además un bus de 8 bits que lo conecta con la memoria, deberá manejar datos e instrucciones de una o más unidades de 8 bits

6
Arquitectura Harvard El CPU esta conectado a dos memorias por intermedio de dos buses separados. Una de las memorias contiene solamente las instrucciones del programa, y es llamada Memoria de Programa. La otra memoria solo almacena los datos y es llamada Memoria de Datos Ambos buses son totalmente independientes y pueden ser de distintos anchos

7
Ventajas Arquitectura Harvard
a) El tamaño de las instrucciones no esta relacionado con el de los datos, y por lo tanto puede ser optimizado para que cualquier instrucción ocupe una sola posición de memoria de programa, logrando así mayor velocidad y menor longitud de programa b) Que el tiempo de acceso a las instrucciones puede superponerse con el de los datos, logrando una mayor velocidad de operación
 El tamaño de las instrucciones no esta relacionado con el de los datos, y por lo tanto puede ser optimizado para que cualquier instrucción ocupe una sola posición de memoria de programa, logrando así mayor velocidad y menor longitud de programa b) Que el tiempo de acceso a las instrucciones puede superponerse con el de los datos, logrando una mayor velocidad de operación")
8
Tipos de Microcontroladores
FABRICANTE MODELOS Microchip PIC Atmel ATmegaXX Dallas Semiconductor Clones del 8051 Hitachi HD64180 Intel 8048, 8051, 80186 Motorola 6805, 68HC11 National Semiconductor COP400, COP8 Phillips Clones 8051 Texas Instrument TMS370 Toshiba TLCS870 Zilog Z8, Z80,Z86XX

9
Conclusiones El microcontrolador surge ante la necesidad de una electronica economica, tamanio reducido y que sea reprogramable Los PIC tienen algo que atrae a los diseñadores, puede ser la velocidad, el precio, la facilidad de uso, la información o las herramientas de apoyo. Quizás un poco de todo eso es lo que produce esa imagen de sencillez y utilidad. Para las aplicaciones más habituales (casi un 90%) la elección de una versión decuada de PIC es la mejor solución; sin embargo, dado su carácter general, otras familias de microcontroladores son más eficaces en aplicaciones específicas
 la elección de una versión decuada de PIC es la mejor solución; sin embargo, dado su carácter general, otras familias de microcontroladores son más eficaces en aplicaciones específicas.")
10
Los detalles más importantes
1. Manejo sencillo: Tienen un juego de instrucciones reducido; 35 en la gama media 2. Información fácil de conseguir y económica 3. Precio comparativamente inferior al de sus competidores 4. Poseen una elevada velocidad de funcionamiento. Buen promedio de parámetros: velocidad, consumo, tamaño, alimentación, código compacto, etc.

11
5. Herramientas de desarrollo fáciles y economicas
5. Herramientas de desarrollo fáciles y economicas. Software libre de Microchip 6. Existe una gran variedad de herramientas hardware que permiten grabar, depurar, borrar y comprobar el comportamiento de los PIC 7. Diseño rápido 8. La gran variedad de modelos de PIC permite elegir el que mejor responde a los requerimientos de la aplicación

12
Arquitectura La arquitectura del procesador sigue el modelo Harvard donde el CPU se conecta de forma independiente y con buses distintos con la memoria de instrucciones y con la de datos La arquitectura Harvard permite a la CPU acceder simultáneamente a las dos memorias Propicia numerosas ventajas al funcionamiento del sistema

13
Segmentacion Técnica de segmentación (Pipe-line) en la ejecución de las instrucciones. La segmentación permite al procesador realizar al mismo tiempo la ejecución de una instrucción y la búsqueda del código de la siguiente De esta forma se puede ejecutar cada instrucción en un ciclo (un ciclo de instrucción equivale a cuatro ciclos de reloj)
")
14
Se puede ejecutar cada instrucción en un ciclo (un ciclo de instrucción equivale a cuatro ciclos de reloj) Las instrucciones de salto ocupan dos ciclos al no conocer la dirección de la siguiente instrucción hasta que no se haya completado la de bifurcación

15
Formato Instrucciones
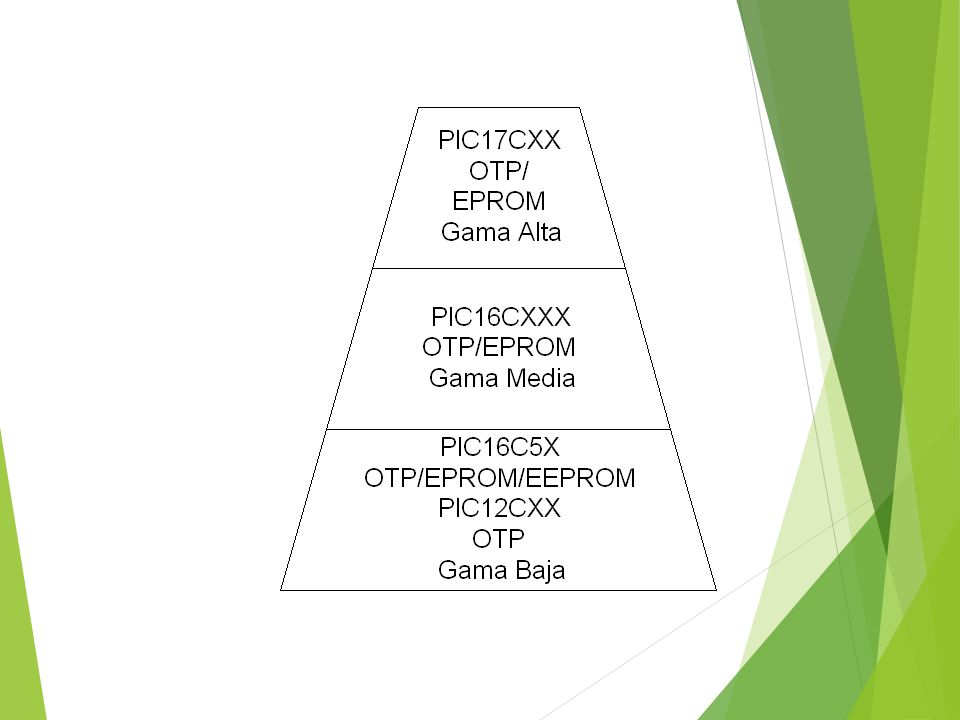
Todas las instrucciones es de la misma longitud Gama baja tiene una longitud de 12 bits Gama media tienen 14 bits Gama baja 33 instrucciones Gama media 35 Gama alta 60

16
Instrucciones son ortogonales
Cualquier instrucción puede manejar cualquier elemento de la arquitectura como fuente o como destino Todos los objetos del sistema (puertos de E/S, temporizadores, posiciones de memoria, etc.) están implementados físicamente como registros PIC 16CXXX Instrucciones de 14 bits Modelos de 18 a 68 pines 35 instrucciones
 están implementados físicamente como registros. PIC 16CXXX. Instrucciones de 14 bits. Modelos de 18 a 68 pines. 35 instrucciones.")
17
PIC 16X84 Memoria de Programa: 1K x14
Memoria de Datos: 36 Bytes (PIC16C84) y 68 Bytes (PIC16F84) Memoria de datos EEPROM: 64 Bytes Pila: De 8 Niveles Interrupciones: 4 tipos diferentes Juego de Instrucciones: 35 Encapsulado: Plástico DIP de 18 Patillas Frecuencia de Trabajo: 10Mhz Máxima Temporizadores: Solo uno el TMR0. También tiene Perro Guardián Líneas de E/S Digitales: 13 (5 Puerta A y 8 Puerta B) Voltaje de Alimentación (VDD): De 2 a 6 V DC Voltaje de Grabación (VDD): de 12 a 14 V DC
 y 68 Bytes (PIC16F84) Memoria de datos EEPROM: 64 Bytes. Pila: De 8 Niveles. Interrupciones: 4 tipos diferentes. Juego de Instrucciones: 35. Encapsulado: Plástico DIP de 18 Patillas. Frecuencia de Trabajo: 10Mhz Máxima. Temporizadores: Solo uno el TMR0. También tiene Perro Guardián. Líneas de E/S Digitales: 13 (5 Puerta A y 8 Puerta B) Voltaje de Alimentación (VDD): De 2 a 6 V DC. Voltaje de Grabación (VDD): de 12 a 14 V DC.")
19
APLICACIONES INTRODUCCION
Desde la invención del circuito integrado, el desarrollo constante de la electrónica digital ha dado lugar a dispositivos cada vez más complejos. Entre ellos los microprocesadores y los microcontroladores, los cuales son básicos en las carreras del área de electrónica.

20
Controlador y microcontrolador.
Recibe el nombre de controlador el dispositivo que se emplea para el gobierno de uno o varios procesos. Por ejemplo, el controlador que regula el funcionamiento de un horno dispone de un sensor que mide constantemente su temperatura interna y, cuando traspasa los límites prefijados, genera las señales adecuadas que accionan los efectores que intentan llevar el valor de la temperatura dentro del rango estipulado.

21
Los productos que para su regulación incorporan un microcontrolador disponen de las siguientes ventajas: Aumento de prestaciones: un mayor control sobre un determinado elemento representa una mejora considerable en el mismo. Aumento de la fiabilidad: al reemplazar el microcontrolador por un elevado número de elementos disminuye el riesgo de averías y se precisan menos ajustes. Reducción del tamaño en el producto acabado: La integración del microcontrolador en un chip disminuye el volumen, la mano de obra y los stocks. Mayor flexibilidad: las características de control están programadas por lo que su modificación sólo necesita cambios en el programa de instrucciones.

22
Un microprocesador es un sistema abierto porque su configuración es variable de acuerdo con la aplicación a la que se destine.

23
El formato de todas las instrucciones tiene la misma longitud
Todas las instrucciones de los microcontroladores de la gama baja tienen una longitud de 12 bits. Las de la gama media tienen 14 bits. Esta característica es muy ventajosa en la optimización de la memoria de instrucciones y facilita enormemente la construcción de ensambladores y compiladores. Procesador RISC (Computador de Juego de Instrucciones Reducido) Los modelos de la gama baja disponen de un repertorio de 33 instrucciones, 35 los de la gama media y casi 60 los de la alta.
 Los modelos de la gama baja disponen de un repertorio de 33 instrucciones, 35 los de la gama media y casi 60 los de la alta.")
24
Todas las instrucciones son ortogonales
Cualquier instrucción puede manejar cualquier elemento de la arquitectura como fuente o como destino. Arquitectura basada en un banco de registros. Esto significa que todos los objetos del sistema (puertos de E/S, temporizadores, posiciones de memoria, etc.) están implementados físicamente como registros. Diversidad de modelos de microcontroladores con prestaciones y recursos diferentes. La gran variedad de modelos de microcontroladores PIC permite que se pueda seleccionar el más conveniente para su proyecto.
 están implementados físicamente como registros. Diversidad de modelos de microcontroladores con prestaciones y recursos diferentes. La gran variedad de modelos de microcontroladores PIC permite que se pueda seleccionar el más conveniente para su proyecto.")
25
Herramientas de soporte potentes y económicas
La empresa Microchip y otras que utilizan los PIC ponen a disposición de los usuarios numerosas herramientas para desarrollar hardware y software. Son muy abundantes los programadores, los simuladores software, los emuladores en tiempo real, ensambladores, Compiladores C, Intérpretes y Compiladores BASIC, etc.

26
¿Qué microcontrolador emplear?
Costos. Aplicación. Procesamiento de datos Entrada Salida Consumo Memoria Ancho de palabra Diseño de la placa

27
1ª. Microcontroladores de arquitectura cerrada
LAS TRES GAMAS DE PIC. 1ª. Microcontroladores de arquitectura cerrada Cada modelo se construye con un determinado CPU, cierta capacidad de memoria de datos, cierto tipo y capacidad de memoria de instrucciones, un número de E/S y un conjunto de recursos auxiliares muy concreto. El modelo no admite variaciones ni ampliaciones.

28
2ª. Microcontroladores de arquitectura abierta
Estos microcontroladores se caracterizan porque, además de disponer de una estructura interna determinada, pueden emplear sus líneas de E/S para sacar al exterior los buses de datos, direcciones y control, con lo que se posibilita la ampliación de la memoria y las E/S con circuitos .integrados externos.

30
Los principales recursos específicos que incorporan los microcontroladores son:
Temporizadores o “Timers”. Perro guardián o “Watchdog”. Protección ante fallo de alimentación o “Brownout”. Estado de reposo o de bajo consumo. Convertidor A/D. Convertidor D/A. Comparador analógico. Modulador de anchura de impulsos o PWM. Puertos de E/S digitales. Puertos de comunicación.

31
Temporizadores o “Timers”
Se emplean para controlar periodos de tiempo (temporizadores) y para llevar la cuenta de acontecimientos que suceden en el exterior (contadores). Para la medida de tiempos se carga un registro con el valor adecuado y a continuación dicho valor se va incrementando o decrementando al ritmo de los impulsos de reloj o algún múltiplo hasta que se desborde y llegue a 0, momento en el que se produce un aviso. Cuando se desean contar acontecimientos que se materializan por cambios de nivel o flancos en alguna de las patitas del microcontrolador, el mencionado registro se va incrementando o decrementando al ritmo de dichos impulsos.
 y para llevar la cuenta de acontecimientos que suceden en el exterior (contadores). Para la medida de tiempos se carga un registro con el valor adecuado y a continuación dicho valor se va incrementando o decrementando al ritmo de los impulsos de reloj o algún múltiplo hasta que se desborde y llegue a 0, momento en el que se produce un aviso. Cuando se desean contar acontecimientos que se materializan por cambios de nivel o flancos en alguna de las patitas del microcontrolador, el mencionado registro se va incrementando o decrementando al ritmo de dichos impulsos.")
32
Perro guardián o “Watchdog”
Cuando la computadora personal se bloquea por un fallo del software u otra causa, se pulsa el botón del reset y se reinicializa el sistema. Pero un microcontrolador funciona sin el control de un supervisor y de forma continuada las 24 horas del día. El Perro guardián consiste en un temporizador que, cuando se desborda y pasa por 0, provoca un reset automáticamente en el sistema. Se debe diseñar el programa de trabajo que controla la tarea de forma que refresque o inicialice al Perro guardián antes de que provoque el reset. Si falla el programa o se bloquea, no se refrescará al Perro guardián y, al completar su temporización, “ladrará y ladrará” hasta provocar el reset.

33
Protección ante fallo de alimentación o “Brownout”
Se trata de un circuito que resetea al microcontrolador cuando el voltaje de alimentación (VDD) es inferior a un voltaje mínimo (“brownout”). Mientras el voltaje de alimentación sea inferior al de brownout el dispositivo se mantiene reseteado, comenzando a funcionar normalmente cuando sobrepasa dicho valor.
 es inferior a un voltaje mínimo ( brownout ). Mientras el voltaje de alimentación sea inferior al de brownout el dispositivo se mantiene reseteado, comenzando a funcionar normalmente cuando sobrepasa dicho valor.")
34
Estado de reposo ó de bajo consumo
Son abundantes las situaciones reales de trabajo en que el microcontrolador debe esperar, sin hacer nada, a que se produzca algún acontecimiento externo que le ponga de nuevo en funcionamiento. Para ahorrar energía, (factor clave en los aparatos portátiles), los microcontroladores disponen de una instrucción especial (SLEEP en los PIC), que les pasa al estado de reposo o de bajo consumo, en el cual los requerimientos de potencia son mínimos. En dicho estado se detiene el reloj principal y se “congelan” sus circuitos asociados, quedando sumido en un profundo “sueño” el microcontrolador. Al activarse una interrupción ocasionada por el acontecimiento esperado, el microcontrolador se despierta y reanuda su trabajo.
, los microcontroladores disponen de una instrucción especial (SLEEP en los PIC), que les pasa al estado de reposo o de bajo consumo, en el cual los requerimientos de potencia son mínimos. En dicho estado se detiene el reloj principal y se congelan sus circuitos asociados, quedando sumido en un profundo sueño el microcontrolador. Al activarse una interrupción ocasionada por el acontecimiento esperado, el microcontrolador se despierta y reanuda su trabajo.")
35
Convertidor A/D (CAD) Los microcontroladores que incorporan un Conversor A/D (Analógico/Digital) pueden procesar señales analógicas, tan abundantes en las aplicaciones. Suelen disponer de un multiplexor que permite aplicar a la entrada del CAD diversas señales analógicas desde las patitas del circuito integrado.
 pueden procesar señales analógicas, tan abundantes en las aplicaciones. Suelen disponer de un multiplexor que permite aplicar a la entrada del CAD diversas señales analógicas desde las patitas del circuito integrado.")
36
Convertidor D/A (CDA) Transforma los datos digitales obtenidos del procesamiento del computador en su correspondiente señal analógica que saca al exterior por una de las patitas de la cápsula. Existen muchos efectores que trabajan con señales analógicas.

37
Comparador analógico Algunos modelos de microcontroladores disponen internamente de un Amplificador Operacional que actúa como comparador entre una señal fija de referencia y otra variable que se aplica por una de las patitas de la cápsula. La salida del comparador proporciona un nivel lógico 1 ó 0 según una señal sea mayor o menor que la otra.

38
Modulador de anchura de impulsos o PWM
Son circuitos que proporcionan en su salida impulsos de anchura variable, que se ofrecen al exterior a través de las patitas del encapsulado.

39
Puertos de E/S digitales
Las líneas digitales de los Puertos pueden configurarse como Entrada o como Salida cargando un 1 ó un 0 en el bit correspondiente de un registro destinado a su configuración.

40
Puertos de comunicación
Con objeto de dotar al microcontrolador de la posibilidad de comunicarse con otros dispositivos externos, otros buses de microprocesadores, buses de sistemas, buses de redes y poder adaptarlos con otros elementos bajo otras normas y protocolos. Algunos modelos disponen de recursos que permiten directamente esta tarea, entre los que destacan: UART, adaptador de comunicación serie asíncrona. USART, adaptador de comunicación serie síncrona y asíncrona Puerto paralelo esclavo para poder conectarse con los buses de otros microprocesadores. USB (Universal Serial Bus). Bus I2C, que es un interfaz serie de dos hilos desarrollado por Philips. CAN (Controller Area Network), para permitir la adaptación con redes de conexionado multiplexado desarrollado conjuntamente por Bosch e Intel para el cableado de dispositivos en automóviles.
. Bus I2C, que es un interfaz serie de dos hilos desarrollado por Philips. CAN (Controller Area Network), para permitir la adaptación con redes de conexionado multiplexado desarrollado conjuntamente por Bosch e Intel para el cableado de dispositivos en automóviles.")
41
INSTRUCCIONES Su juego de instrucciones es reducido (33 instrucciones en la gama baja y 35 en al gama media), siendo éstas, además, sencillas y rápidas, puesto que casi todas se ejecutan en un único ciclo de máquina (equivalente a 4 del reloj principal). Sus operandos son de gran flexibilidad, pudiendo actuar cualquier objeto como fuente y como destino
, siendo éstas, además, sencillas y rápidas, puesto que casi todas se ejecutan en un único ciclo de máquina (equivalente a 4 del reloj principal). Sus operandos son de gran flexibilidad, pudiendo actuar cualquier objeto como fuente y como destino.")
42
Posee tres tipos bien diferenciados de direccionamiento, estos son:
1º Inmediato: El valor del dato está incluido en el propio código OP, junto a la instrucción. 2º Directo: La dirección del dato está incluido en el propio código OP, junto a la instrucción. 3º Indirecto: La dirección de la memoria de datos que guarda el operando está contenida en un registro.

43
Definiciones y abreviaturas
Abreviatura Descripción PC TOS WDT W F D Dest TO PD b k x label [] () <> Z C DC Itálicas Contador de Programa que direcciona la memoria de instrucciones. Tiene un tamaño de 11 bits en la gama baja, de los cuales los 8 de menos peso configuran el registro PCL que ocupa el registro 0x02 del área de datos. Cima de la pila, con 2 niveles en la gama baja y 8 en la media Perro guardián (Watchdog) Registro W, similar al acumulador Suele ser un campo de 5 bits (fffff) que contiene la dirección del banco de registros, que ocupa el banco 0 del área de datos. Direcciona uno de esos registros. Bit del código OP de la instrucción, que selecciona el destino. Si d=0, el destino es W, y si d=1 el destino es f. Destino (registro W o f) Bit “Time Out” del registro de estado Bit “Power Down” del registro de estado Suele ser un campo de 3 bits (bbb) que determinan la posición de un bit dentro de un registro de 8 bits Se trata, normalmente, de un campo de 8 bits (kkkkkkkk) que representa un dato inmediato. También puede constar de 9 bits en las instrucciones de salto que cargan al PC Valor indeterminado (puede ser un 0 o un 1). Para mantener la compatibilidad con las herramientas software de Microchip conviene hacer x = 0 Nombre de la etiqueta Opciones Contenido Se asigna a Campo de bits de un registro Pertenece al conjunto Señalizador de cero en W. Pertenece al registro de estado Señalizador de acarreo en el octavo bit del W. Pertenece al registro de estado Señaliza el acarreo en el 4 bit del W. Pertenece al registro de estado Términos definidos por el usuario
 <> Z. C. DC. Itálicas. Contador de Programa que direcciona la memoria de instrucciones. Tiene un tamaño de 11 bits en la gama baja, de los cuales los 8 de menos peso configuran el registro PCL que ocupa el registro 0x02 del área de datos. Cima de la pila, con 2 niveles en la gama baja y 8 en la media. Perro guardián (Watchdog) Registro W, similar al acumulador. Suele ser un campo de 5 bits (fffff) que contiene la dirección del banco de registros, que ocupa el banco 0 del área de datos. Direcciona uno de esos registros. Bit del código OP de la instrucción, que selecciona el destino. Si d=0, el destino es W, y si d=1 el destino es f. Destino (registro W o f) Bit Time Out del registro de estado. Bit Power Down del registro de estado. Suele ser un campo de 3 bits (bbb) que determinan la posición de un bit dentro de un registro de 8 bits. Se trata, normalmente, de un campo de 8 bits (kkkkkkkk) que representa un dato inmediato. También puede constar de 9 bits en las instrucciones de salto que cargan al PC. Valor indeterminado (puede ser un 0 o un 1). Para mantener la compatibilidad con las herramientas software de Microchip conviene hacer x = 0. Nombre de la etiqueta. Opciones. Contenido. Se asigna a. Campo de bits de un registro. Pertenece al conjunto. Señalizador de cero en W. Pertenece al registro de estado. Señalizador de acarreo en el octavo bit del W. Pertenece al registro de estado. Señaliza el acarreo en el 4 bit del W. Pertenece al registro de estado. Términos definidos por el usuario.")
44
COMANDOS DE PICS DE LA GAMA MEDIA

45
Instrucciones Orientadas a Registros
MNEMÓNICO DESCRIPCIÓN CÓDIGO OP FLAGS AFECTADOS NOTAS Instrucciones Orientadas a Registros ADDWF f,d ANDWF f,d CLRF f CLRW COMF f,d DECF f,d DECFSZ f,d INCF f,d INCFSZ f,d IORWF f,d MOVF f,d MOVWF f NOP RLF f,d RRF f,d SUBWF f,d SWAPF f,d XORWF f,d (W)+(f) à (destino) (W) AND (f) à (destino) 00 à (f) 00 à (W) Complemento de f [(#f)à (destino)] (f)-1 à destino (f)-1 à destino y si resultado es 0 salta (f)+1 à destino (f)+1 à destino y si resultado es 0 salta (W) OR (f) à destino Mueve f à destino (W) à (f) No operación Rota f a la izq a través del carry à destino Rota f a la dcha a través del cary à destino (f)–(W) à (destino) Intercambia los nibbles de f à destino (W) XOR (f) à (destino) dfff ffff dfff ffff fff ffff dfff ffff dfff ffff dfff ffff dfff ffff dfff ffff dfff ffff dfff ffff fff ffff xx0 0000 dfff ffff dfff ffff dfff ffff dfff ffff dfff ffff C, DC, Z Z Ninguno C C,DC,Z 1,2 2 1,2,3
+(f) à (destino) (W) AND (f) à (destino) 00 à (f) 00 à (W) Complemento de f [(#f)à (destino)] (f)-1 à destino. (f)-1 à destino y si resultado es 0 salta. (f)+1 à destino. (f)+1 à destino y si resultado es 0 salta. (W) OR (f) à destino. Mueve f à destino. (W) à (f) No operación. Rota f a la izq a través del carry à destino. Rota f a la dcha a través del cary à destino. (f)–(W) à (destino) Intercambia los nibbles de f à destino. (W) XOR (f) à (destino) dfff ffff dfff ffff fff ffff dfff ffff dfff ffff dfff ffff dfff ffff dfff ffff dfff ffff dfff ffff fff ffff xx dfff ffff dfff ffff dfff ffff dfff ffff dfff ffff. C, DC, Z. Z. Ninguno. C. C,DC,Z. 1, ,2,3.")
46
Pone a 0 el bit b del registro f
MNEMÓNICO DESCRIPCIÓN CÓDIGO OP FLAGS AFECTADOS Instrucciones orientadas a Bit BCF f,b BSF f,b BTFSC f,b BTFSS f,b Pone a 0 el bit b del registro f Pone a 1 el bit b del registro f Skip si el bit b del reg. f es 0 Skip si el bit b del reg. f es 1 01 00bb bfff ffff 01 01bb bfff ffff 01 10bb bfff ffff 01 11bb bfff ffff Ninguno Instrucciones con literales y de control ADDLW K ANDLW K CALL K CLRWDT GOTO K IORLW K MOVLW K RETFIE RETLW K RETURN SLEEP SUBLW K XORLW K (W)+ K à (W) (W) AND K à (W) Llamada a subrutina Clear del temporizador del WD Go To dirección (W) OR K à (W) K à (W) Retorno de una interrupción Retorno con un literal en W Retorno de una subrutina Modo Standby K – (W) à W (W) XOR K à (W) 11 111x kkkk kkkk kkkk kkkk 10 0kkk kkkk kkkk 10 1kkk kkkk kkkk kkkk kkkk 11 00xx kkkk kkkk 11 01xx kkkk kkkk 11 110x kkkk kkkk kkkk kkkk C,DC,Z Z
+ K à (W) (W) AND K à (W) Llamada a subrutina. Clear del temporizador del WD. Go To dirección. (W) OR K à (W) K à (W) Retorno de una interrupción. Retorno con un literal en W. Retorno de una subrutina. Modo Standby. K – (W) à W. (W) XOR K à (W) x kkkk kkkk kkkk kkkk. 10 0kkk kkkk kkkk kkk kkkk kkkk kkkk kkkk xx kkkk kkkk xx kkkk kkkk x kkkk kkkk kkkk kkkk. C,DC,Z. Z.")
47
Notas.- Al modificar un registro de E/S con una operación sobre él mismo (por ejemplo MOVF PORTB,1), el valor utilizado es el que se halle presente en los pines del PORTB. Por ejemplo, si el biestable tiene un "1" para una patilla configurada como entrada y se pone a nivel bajo desde el exterior, el dato se volverá a escribir como "0“ Si se ejecuta esta instrucción sobre el TMR0 y d=1, será borrado el divisor de frecuencia (preescaler), si está asignado al TMR0 3. Si se modifica el Contador de Programa (PC) o una condición de prueba es verdadera, la instrucción requiere dos ciclos máquina. El segundo ciclo se ejecuta como un NOP
, el valor utilizado es el que se halle presente en los pines del PORTB. Por ejemplo, si el biestable tiene un 1 para una patilla configurada como entrada y se pone a nivel bajo desde el exterior, el dato se volverá a escribir como 0 Si se ejecuta esta instrucción sobre el TMR0 y d=1, será borrado el divisor de frecuencia (preescaler), si está asignado al TMR0. 3. Si se modifica el Contador de Programa (PC) o una condición de prueba es verdadera, la instrucción requiere dos ciclos máquina. El segundo ciclo se ejecuta como un NOP.")
48
ADDLW ADD Literal to W Operación (W) + k ----> (W) Sintaxis
ADD Literal to W Operación (W) + k ----> (W) Sintaxis [Etiqueta] ADDLW k Operadores 0 < k < 255 Cod.Oper. df ffff Palabras 1 Ciclos Código de Operación 11 111x kkkk Descripción Suma el contenido del registro W al literal k, y almacena el resultado en W.Si se produce acerreo el flag C se pone a "1" Nota.- Esta instrucción no existe en el PIC 16C5X C Se pone a 1 si se produce un Acarreo desde el bit de mayor peso DC Se pone a 1 si se genera un Acarreo del bit 3 al bit 4. Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: ADDLW 0x15 Si antes de la instrucción: W = 10h = b Al ejecutarse la instrucción W = 10 h + 15 h = 25 h W = b b = b Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X
 + k ----> (W) Sintaxis. [Etiqueta] ADDLW k. Operadores. 0 < k < 255. Cod.Oper df ffff. Palabras. 1. Ciclos. Código de Operación x. kkkk. Descripción. Suma el contenido del registro W al literal k, y almacena el resultado en W.Si se produce acerreo el flag C se pone a 1 Nota.- Esta instrucción no existe en el PIC 16C5X. C Se pone a 1 si se produce un Acarreo desde el bit de mayor peso. DC Se pone a 1 si se genera un Acarreo del bit 3 al bit 4. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: ADDLW 0x15. Si antes de la instrucción: W = 10h = b. Al ejecutarse la instrucción. W = 10 h + 15 h = 25 h. W = b b = b. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X.")
49
(W) + (f) ----> (destino)
ADDWF ADD W to F Operación (W) + (f) ----> (destino) Sintaxis [Etiqueta] ADDWF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 0111 dfff ffff Descripción Suma el contenido del registro W al contenido del registro f, y almacena el resultado en W si d = 0, y en el registro f si d = 1.Si se produce acerreo el flag C se pone a "1" C Se pone a 1 si se produce un Acarreo desde el bit de mayor peso DC Se pone a 1 si se genera un Acarreo del bit 3 al bit 4. Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: ADDWF FSR,0 Si antes de la instrucción. W = 17 h y FSR = C2 h como d=0 Al ejecutarse: W = 17 h+ C2 h = D9 h FSR = C2 h Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X
 + (f) ----> (destino) Sintaxis. [Etiqueta] ADDWF f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Suma el contenido del registro W al contenido del registro f, y almacena el resultado en W si d = 0, y en el registro f si d = 1.Si se produce acerreo el flag C se pone a 1 C Se pone a 1 si se produce un Acarreo desde el bit de mayor peso. DC Se pone a 1 si se genera un Acarreo del bit 3 al bit 4. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: ADDWF FSR,0. Si antes de la instrucción. W = 17 h y FSR = C2 h como d=0. Al ejecutarse: W = 17 h+ C2 h = D9 h. FSR = C2 h. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X.")
50
(W).AND. (k) ----> (W)
ANDLW AND Literal and W Operación (W).AND. (k) ----> (W) Sintaxis [Etiqueta] ANDLW k Operadores 0 < f < 255 Palabras 1 Ciclos Código de Operación 11 1001 kkkk Descripción Efectúa la operación AND lógico entre el contenido del registro W y el literal k, y almacena el resultado en W. Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: ANDLW 0x5F Si antes de la instrucción. W = A3 h Al ejecutarse: W = b AND b = B = 03 h
.AND. (k) ----> (W) Sintaxis. [Etiqueta] ANDLW k. Operadores. 0 < f < 255. Palabras. 1. Ciclos. Código de Operación kkkk. Descripción. Efectúa la operación AND lógico entre el contenido del registro W y el literal k, y almacena el resultado en W. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: ANDLW 0x5F. Si antes de la instrucción. W = A3 h. Al ejecutarse: W = b AND b = B = 03 h.")
51
(W) AND (f) ----> (destino)
ANDWF AND W wind F Operación (W) AND (f) ----> (destino) Sintaxis [Etiqueta] ANDWF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 0101 dfff ffff Descripción Efectúa la operación AND lógico entre el contenido del registro W y el contenido del registro f, y almacena el resultado en W si d = 0, y en f si d = 1. Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: ANDWF FSR,1 Si antes de la instrucción. W = 17 h = b y FSR = C2 h = h Al ejecutarse: W = 17 h = b FSR = b AND b = b = 02 h
 AND (f) ----> (destino) Sintaxis. [Etiqueta] ANDWF f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Efectúa la operación AND lógico entre el contenido del registro W y el contenido del registro f, y almacena el resultado en W si d = 0, y en f si d = 1. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: ANDWF FSR,1. Si antes de la instrucción. W = 17 h = b y FSR = C2 h = h. Al ejecutarse: W = 17 h = b. FSR = b AND b = b = 02 h.")
52
BCF Bit Clear F Operación 0 --> (f<b>) Sintaxis
Bit Clear F Operación 0 --> (f<b>) Sintaxis [Etiqueta] BCF f,b Operadores 0 < f < 127 0 < b < 7 Palabras 1 Ciclos Código de Operación 01 00bb bfff ffff Descripción Pone a cero el bit número b del registro f Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - EJEMPLO: BCF FLAG_REG, 7 Si antes de la instrucción el registro FLAG_REG = C7 h = b Al ejecutarse la instrucción, el registro queda con el valor: FLAG_REG = 47b = b
 Sintaxis. [Etiqueta] BCF f,b. Operadores. 0 < f < < b < 7. Palabras. 1. Ciclos. Código de Operación bb. bfff. ffff. Descripción. Pone a cero el bit número b del registro f. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - EJEMPLO: BCF FLAG_REG, 7. Si antes de la instrucción el registro. FLAG_REG = C7 h = b. Al ejecutarse la instrucción, el registro queda con el valor: FLAG_REG = 47b = b.")
53
BSF Bit Set F Operación 1 --> (f<b>) Sintaxis
Bit Set F Operación 1 --> (f<b>) Sintaxis [Etiqueta] BSF f,b Operadores 0 < f < 127 0 < b < 7 Palabras 1 Ciclos Código de Operación 01 11bb bfff ffff Descripción Pone a 1 el bit b del registro f Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - EJEMPLO: BSF FLAG_REG, 7 Si antes de la instrucción el registro tiene el valor. FLAG_REG = 0A h = b Al ejecutarse la instrucción, el registro queda con el valor: FLAG_REG = 8A h = b
 Sintaxis. [Etiqueta] BSF f,b. Operadores. 0 < f < < b < 7. Palabras. 1. Ciclos. Código de Operación bb. bfff. ffff. Descripción. Pone a 1 el bit b del registro f. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - EJEMPLO: BSF FLAG_REG, 7. Si antes de la instrucción el registro tiene el valor. FLAG_REG = 0A h = b. Al ejecutarse la instrucción, el registro queda con el valor: FLAG_REG = 8A h = b.")
54
BTFSC Bit Test, Skip if Clear Operación skip if (f<b>) = 0
Bit Test, Skip if Clear Operación skip if (f<b>) = 0 Sintaxis [Etiqueta] BTFSC f,b Operadores 0 < f < 127 0 < b <7 Palabras 1 Ciclos 1 (2) Código de operación 01 10bb bfff ffff Descripción Si el bit número b del registro f es cero, la instrucción que sigue a ésta se ignora y se trata como un NOP (skip). En este caso, y sólo en este caso, la instrucción BTFSC precisa dos ciclos para ejecutarse. EJEMPLO: HERE BTFSC FLAG,1 FALSE GOTO PROCESS_CODE TRUE . Si antes de la instrucción. PC = dirección HERE Al ejecutarse: if FLAG<1> = 0, PC = dirección TRUE if FLAG<1> = 1, PC = dirección FALSE Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C -
 = 0. Sintaxis. [Etiqueta] BTFSC f,b. Operadores. 0 < f < < b <7. Palabras. 1. Ciclos. 1 (2) Código de operación bb. bfff. ffff. Descripción. Si el bit número b del registro f es cero, la instrucción que sigue a ésta se ignora y se trata como un NOP (skip). En este caso, y sólo en este caso, la instrucción BTFSC precisa dos ciclos para ejecutarse. EJEMPLO: HERE BTFSC FLAG,1. FALSE GOTO PROCESS_CODE. TRUE . Si antes de la instrucción. PC = dirección HERE. Al ejecutarse: if FLAG<1> = 0, PC = dirección TRUE. if FLAG<1> = 1, PC = dirección FALSE. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. -")
55
BTFSS Bit Test, Skip if Set Operación skip if (f<b>) = 1
Bit Test, Skip if Set Operación skip if (f<b>) = 1 Sintaxis [Etiqueta] BTFSS f,b Operadores 0 < f < 127 0 < b <7 Palabras 1 Ciclos 1 (2) Código de Operación 01 11bb bfff ffff Descripción Si el bit número b del registro f está a 1, la instrucción que sigue a ésta se ignora y se trata como un NOP (skip). En este caso, y sólo en este caso, la instrucción BTFSS precisa dos ciclos para ejecutarse. EJEMPLO: HERE BTFSS FLAG,1 FALSE GOTO PROCESS_CODE TRUE . Si antes de la instrucción. PC = dirección HERE Al ejecutarse: if FLAG<1> = 0, PC = dirección FALSE if FLAG<1> = 1, PC = dirección TRUE Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C -
 = 1. Sintaxis. [Etiqueta] BTFSS f,b. Operadores. 0 < f < < b <7. Palabras. 1. Ciclos. 1 (2) Código de Operación bb. bfff. ffff. Descripción. Si el bit número b del registro f está a 1, la instrucción que sigue a ésta se ignora y se trata como un NOP (skip). En este caso, y sólo en este caso, la instrucción BTFSS precisa dos ciclos para ejecutarse. EJEMPLO: HERE BTFSS FLAG,1. FALSE GOTO PROCESS_CODE. TRUE . Si antes de la instrucción. PC = dirección HERE. Al ejecutarse: if FLAG<1> = 0, PC = dirección FALSE. if FLAG<1> = 1, PC = dirección TRUE. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. -")
56
CALL Subrutine Call Operandos 0 = k = 2047 Sintaxis [Etiqueta] CALL k
Subrutine Call Operandos 0 = k = 2047 Sintaxis [Etiqueta] CALL k Operación (PC)+1 ---> Top of Stack k ---> PC <10:0>; PCLATCH (<4:3>) ---> PC (<12,11>) Palabras 1 Ciclos 2 Código de Operación 10 0kkk kkkk Descripción Salvaguarda la dirección de vuelta en la Pila y después llama a la subrutina situada en la dirección cargada en el PC. El modo de cálculo de la dirección efectiva difiere según la familia PIC utilizada. También hay que posicionar PA2, PA1 y PA0 (PIC 16C5X) o el registro PCLATCH (En los demás PIC) antes de ejecutarse la instrucción. EJEMPLO: HERE CALL THERE Si antes de la instrucción. PC = dirección HERE Al ejecutarse: PC = dirección (THERE) TOS = dirección (HERE +1) Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C -
![CALL Subrutine Call Operandos 0 = k = 2047 Sintaxis [Etiqueta] CALL k](http://slideplayer.es/slide/9890193/32/images/56/CALL+Subrutine+Call+Operandos+0+%3D+k+%3D+2047+Sintaxis+%5BEtiqueta%5D+CALL+k.jpg "Subrutine Call. Operandos. 0 = k = Sintaxis. [Etiqueta] CALL k. Operación. (PC)+1 ---> Top of Stack. k ---> PC <10:0>; PCLATCH (<4:3>) ---> PC (<12,11>) Palabras. 1. Ciclos. 2. Código de Operación kkk. kkkk. Descripción. Salvaguarda la dirección de vuelta en la Pila y después llama a la subrutina situada en la dirección cargada en el PC. El modo de cálculo de la dirección efectiva difiere según la familia PIC utilizada. También hay que posicionar PA2, PA1 y PA0 (PIC 16C5X) o el registro PCLATCH (En los demás PIC) antes de ejecutarse la instrucción. EJEMPLO: HERE CALL THERE. Si antes de la instrucción. PC = dirección HERE. Al ejecutarse: PC = dirección (THERE) TOS = dirección (HERE +1) Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. -")
57
CLRF Clear f Operación 00h --> f 1 ---> Z Sintaxis
Clear f Operación 00h --> f 1 ---> Z Sintaxis [Etiqueta] CLRF f Operadores 0 < f < 127 Palabras 1 Ciclos Código de Operación 00 0001 1fff ffff Descripción Se borra el contenido del registro f y el flag Z se activa PA2 PA1 PA0 TO# PD# Z DC C - 1 Registro de STATUS Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: CLRF REG Si antes de la instrucción. REG = 5A h Al ejecutarse: REG = 00 h flag Z = 1

58
CLRW Z Se pone a 1 si el resultado de la operación es cero EJEMPLO:
Clear W Operación 00h -->(W) 1 ---> Z Sintaxis [Etiqueta] CLRW Operadores No tiene Palabras 1 Ciclos Código de Operación 00 0001 0000 0011 Descripción El registro de trabajo W se carga con 00h. El flag Z se pone a 1 Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - 1 Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: CLRW Si antes de la instrucción. W= 5Ah Al ejecutarse: W = 00 flag Z = 1
 1 ---> Z. Sintaxis. [Etiqueta] CLRW. Operadores. No tiene. Palabras. 1. Ciclos. Código de Operación Descripción. El registro de trabajo W se carga con 00h. El flag Z se pone a 1. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: CLRW. Si antes de la instrucción. W= 5Ah. Al ejecutarse: W = 00. flag Z = 1.")
59
CLRWDT Clear Watchdog Timer Operación 00h --> WDT 1 --> T0# 1 --> PD# Sintaxis [Etiqueta] CLRWDT Operadores No tiene Palabras 1 Ciclos Código de Operación 00 0000 0110 0100 Descripción Se borra tanto el registro WDT (Watchdog) como su preescaler. Los bits T0# y PD# del registro de estado se ponen a "1". Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - 1 T0# Se pone a 1 cuando se ejecuta la instrucción CLRWDT o SLEEP. Se pone a 0 si el temporizador Watchdog se desborda PD# Se pone a 1 cuando se ejecuta la instrucción CLRWDT o SLEEP EJEMPLO: CLRWDT Si antes de ejecutarse la instrucción WDT = ? Al ejecutarse: WDT = 00 h Preescaler WDT = 0 bit de estado T0 = 1 bit de estado PD = 1
![CLRWDT Clear Watchdog Timer. Operación. 00h --> WDT. 1 --> T0# 1 --> PD# Sintaxis. [Etiqueta] CLRWDT.](http://slideplayer.es/slide/9890193/32/images/59/CLRWDT+Clear+Watchdog+Timer.+Operaci%C3%B3n.+00h+--%3E+WDT.+1+--%3E+T0%23+1+--%3E+PD%23+Sintaxis.+%5BEtiqueta%5D+CLRWDT..jpg "Operadores. No tiene. Palabras. 1. Ciclos. Código de Operación Descripción. Se borra tanto el registro WDT (Watchdog) como su preescaler. Los bits T0# y PD# del registro de estado se ponen a 1 . Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C T0# Se pone a 1 cuando se ejecuta la instrucción CLRWDT o SLEEP. Se pone a 0 si el temporizador Watchdog se desborda. PD# Se pone a 1 cuando se ejecuta la instrucción CLRWDT o SLEEP. EJEMPLO: CLRWDT. Si antes de ejecutarse la instrucción. WDT = Al ejecutarse: WDT = 00 h. Preescaler WDT = 0. bit de estado T0 = 1. bit de estado PD = 1.")
60
COMF Complement f Operación (f#) -----> (dest) Sintaxis
Complement f Operación (f#) -----> (dest) Sintaxis [Etiqueta] COMF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 1001 dfff ffff Descripción Hace el complemento del contenido del registro f bit a bit. El resultado se almacena en el registro f si d=1 y en el registro W si d=0, en este caso f no varía. Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: COMF REG1,0 Si antes de la instrucción. REG1 = 13 h como d= 0 Al ejecutarse: REG1 = 13 h = b W = EC h = b flag Z = 0
 -----> (dest) Sintaxis. [Etiqueta] COMF f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Hace el complemento del contenido del registro f bit a bit. El resultado se almacena en el registro f si d=1 y en el registro W si d=0, en este caso f no varía. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: COMF REG1,0. Si antes de la instrucción. REG1 = 13 h como d= 0. Al ejecutarse: REG1 = 13 h = b. W = EC h = b. flag Z = 0.")
61
DECF Decrement f Operación (f)-1 --> (dest) Sintaxis
Decrement f Operación (f)-1 --> (dest) Sintaxis [Etiqueta] DECF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 0011 dfff ffff Descripción Se decrementa el contenido del registro f en una unidad. El resultado se almacena en f si d=1 y en W si d=0, en este caso f no varía. Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: DECF CNT,1 Si antes de la instrucción. CNT = 01 h Z = 0 Al ejecutarse: CNT = 00 h bit Z = 1
-1 --> (dest) Sintaxis. [Etiqueta] DECF f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Se decrementa el contenido del registro f en una unidad. El resultado se almacena en f si d=1 y en W si d=0, en este caso f no varía. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: DECF CNT,1. Si antes de la instrucción. CNT = 01 h. Z = 0. Al ejecutarse: CNT = 00 h. bit Z = 1.")
62
(f) -1 --> (dest) ; skip if result =0
DECFSZ Decrement f , Skip if 0 Operación (f) -1 --> (dest) ; skip if result =0 Sintaxis [Etiqueta] DECFSZ f,d Operadores 0 < f < 127 d [0.1] Palabras 1 Ciclos 1 (2) Código de Operación 00 1011 dfff ffff Descripción Decrementa el contenido del registro f en una unidad, el resultado se almacena en f si d=1 y en W si d=0, en este caso, f no varía. Si el resultado es cero, se ignora la siguiente instrucción y, en ese caso la instrucción tiene una duración de dos ciclos. PA2 PA1 PA0 TO# PD# Z DC C - Registro de STATUS EJEMPLO: HERE DECFSZ CNT,1 GOTO LOOP CONTINUE Si antes de la instrucción. PC = dirección HERE Al ejecutarse: CNT = CNT -1 Si CNT = 0 entonces PC = dirección CONTINUE Si CNT no = 0 entonces PC = dirección HERE + 1
 -1 --> (dest) ; skip if result =0. Sintaxis. [Etiqueta] DECFSZ f,d. Operadores. 0 < f < 127. d [0.1] Palabras. 1. Ciclos. 1 (2) Código de Operación dfff. ffff. Descripción. Decrementa el contenido del registro f en una unidad, el resultado se almacena en f si d=1 y en W si d=0, en este caso, f no varía. Si el resultado es cero, se ignora la siguiente instrucción y, en ese caso la instrucción tiene una duración de dos ciclos. PA2. PA1. PA0. TO# PD# Z. DC. C. - Registro de STATUS. EJEMPLO: HERE DECFSZ CNT,1. GOTO LOOP. CONTINUE. Si antes de la instrucción. PC = dirección HERE. Al ejecutarse: CNT = CNT -1. Si CNT = 0 entonces PC = dirección CONTINUE. Si CNT no = 0 entonces PC = dirección HERE + 1.")
63
(PCLATH <4:3>) ---> (PC <12:11>)
GOTO Unconditional Branch Operación K --> PC <10:0> (PCLATH <4:3>) ---> (PC <12:11>) Sintaxis [Etiqueta] GOTO k Operadores 0 < k < 2047 Palabras 1 Ciclos 2 Código de Operación 10 1kkkk kkkk Descripción Salto incondicional, normalmente se utiliza para llamar a la subrutina situada en la dirección que se carga en PC. El modo de cálculo de la instrucción caga de bit 0 al 10 de la constante k en el PC y los bits 3 y 4 del registro PCLATH en los 11 y 12 del PC PA2 PA1 PA0 TO# PD# Z DC C - Registro de STATUS EJEMPLO: GOTO THERE Al ejecutarse: PC = dirección THERE
 ---> (PC <12:11>) Sintaxis. [Etiqueta] GOTO k. Operadores. 0 < k < Palabras. 1. Ciclos. 2. Código de Operación kkkk. kkkk. Descripción. Salto incondicional, normalmente se utiliza para llamar a la subrutina situada en la dirección que se carga en PC. El modo de cálculo de la instrucción caga de bit 0 al 10 de la constante k en el PC y los bits 3 y 4 del registro PCLATH en los 11 y 12 del PC. PA2. PA1. PA0. TO# PD# Z. DC. C. - Registro de STATUS. EJEMPLO: GOTO THERE. Al ejecutarse: PC = dirección THERE.")
64
INCF Increment f Operación (f) + 1 --> (dest) Sintaxis
Increment f Operación (f) > (dest) Sintaxis [Etiqueta] INCF f,d Operadores 0 < f < 127 d [0,1] (f) > (dest) Palabras 1 Ciclos Código de Operación 00 1010 dfff ffff Descripción Se incrementa en una unidad el contenido del registro f, si d=1 el resultado se almacena en f, si d=0 el resultado se almacena en W, en este caso el resultado de f no varía. Z Se pone a 1 si el resultado de la operación es cero al haber desbordamiento EJEMPLO: INCF CNT,1 Si antes de la instrucción: CNT = FF h flag Z = 0 Al ejecutarse: FF h +1 h = 00 h CNT = 00 flag Z = 1 Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X
 > (dest) Sintaxis. [Etiqueta] INCF f,d. Operadores. 0 < f < 127. d [0,1] (f) > (dest) Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Se incrementa en una unidad el contenido del registro f, si d=1 el resultado se almacena en f, si d=0 el resultado se almacena en W, en este caso el resultado de f no varía. Z Se pone a 1 si el resultado de la operación es cero al haber desbordamiento. EJEMPLO: INCF CNT,1. Si antes de la instrucción: CNT = FF h. flag Z = 0. Al ejecutarse: FF h +1 h = 00 h. CNT = 00. flag Z = 1. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X.")
65
INCFSZ Increment f, SKIP if 0 Operación
Increment f, SKIP if 0 Operación (f) +1 --> (dest) , skip if result = 0 Sintaxis [Etiqueta] <INCFSZ f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos 1 (2) Código de Operación 00 1111 dfff ffff Descripción Incrementa el contenido del registro f en una unidad, el resultado se almacena de nuevo en f si d=1, y en W si d=0, en este caso, f no varía. Si el resultado es cero, se ignora la siguiente instrucción y, en ese caso la instrucción tiene una duración de dos ciclos. EJEMPLO: HERE INCFSZ CNT,1 GOTO LOP CONTINUE Si antes de la instrucción. PC = dirección HERE Al ejecutarse: CNT = CNT+1 Si CNT = 0 Entonces PC = dirección CONTINUE Si CNT no = 0 Entonces PC = dirección HERE + 1 Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C -
 +1 --> (dest) , skip if result = 0. Sintaxis. [Etiqueta] <INCFSZ f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. 1 (2) Código de Operación dfff. ffff. Descripción. Incrementa el contenido del registro f en una unidad, el resultado se almacena de nuevo en f si d=1, y en W si d=0, en este caso, f no varía. Si el resultado es cero, se ignora la siguiente instrucción y, en ese caso la instrucción tiene una duración de dos ciclos. EJEMPLO: HERE INCFSZ CNT,1. GOTO LOP. CONTINUE. Si antes de la instrucción. PC = dirección HERE. Al ejecutarse: CNT = CNT+1. Si CNT = 0. Entonces PC = dirección CONTINUE. Si CNT no = 0. Entonces PC = dirección HERE + 1. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. -")
66
Inclusive OR Literal with W
IORLW Inclusive OR Literal with W Operación (W).OR.k ---> (W) Sintaxis [Etiqueta] IORLW k Operadores 0 < k < 255 Palabras 1 Ciclos Código de Operación 11 1000 kkkk Descripción Se realiza la operación lógica OR entre el registro W y el literal k. El resultado se almacena en el registro W. Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: IORLW 0x35 Si antes de la instrucción. W = 9A h Al ejecutarse: W = b b = b = BF h
.OR.k ---> (W) Sintaxis. [Etiqueta] IORLW k. Operadores. 0 < k < 255. Palabras. 1. Ciclos. Código de Operación kkkk. Descripción. Se realiza la operación lógica OR entre el registro W y el literal k. El resultado se almacena en el registro W. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: IORLW 0x35. Si antes de la instrucción. W = 9A h. Al ejecutarse: W = b b = b = BF h.")
67
(W) .OR.(f)--> (dest)
IORWF Inclusive OR W with f Operación (W) .OR.(f)--> (dest) Sintaxis [Etiqueta] IORWF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 0100 dfff ffff Descripción Efectúa la operación lógica OR entre el contenido del registro W y el contenido del registro f, y almacena el resultado en f si d=1 y en W si d=0. PA2 PA1 PA0 TO# PD# Z DC C - X Registro de STATUS Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: IORWF RESUL,0 Si antes de la instrucción. RESUL = 13 h = b W = 91 h = b Al ejecutarse: RESUL= b OR b = b = 93 h
 .OR.(f)--> (dest) Sintaxis. [Etiqueta] IORWF f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Efectúa la operación lógica OR entre el contenido del registro W y el contenido del registro f, y almacena el resultado en f si d=1 y en W si d=0. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Registro de STATUS. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: IORWF RESUL,0. Si antes de la instrucción. RESUL = 13 h = b. W = 91 h = b. Al ejecutarse: RESUL= b OR b = b = 93 h.")
68
MOVLW Move literal to W Operación k --> (W) Sintaxis
Move literal to W Operación k --> (W) Sintaxis [Etiqueta] MOVLW k Operadores 0 < f < 255 Palabras 1 Ciclos Código de Operación 11 00xx kkkk Descripción El registro W se carga con el valor de 8 bits del literal k PA2 PA1 PA0 TO# PD# Z DC C - X Registro de STATUS EJEMPLO: MOVLW 0x5A Al ejecutarse: W = 5A h
 Sintaxis. [Etiqueta] MOVLW k. Operadores. 0 < f < 255. Palabras. 1. Ciclos. Código de Operación xx. kkkk. Descripción. El registro W se carga con el valor de 8 bits del literal k. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Registro de STATUS. EJEMPLO: MOVLW 0x5A. Al ejecutarse: W = 5A h.")
69
MOVF Move f Operación (f) --> (dest) Sintaxis [Etiqueta] MOVF f,d
Move f Operación (f) --> (dest) Sintaxis [Etiqueta] MOVF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 10000 dfff ffff Descripción El contenido del registro f se carga en el registro destino dependiendo del valor de d. Si d=0 el destino es el registro W, si d=1 el destino es el propio registro f . Esta instrucción permite verificar dicho registro ya que el flag Z queda afectado. Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X Z Se pone a 1 si el resultado de la operación es cero EJEMPLO: MOVF FSR,0 Al ejecutarse: W = al valor del FSR
![MOVF Move f Operación (f) --> (dest) Sintaxis [Etiqueta] MOVF f,d](http://slideplayer.es/slide/9890193/32/images/69/MOVF+Move+f+Operaci%C3%B3n+%28f%29+--%3E+%28dest%29+Sintaxis+%5BEtiqueta%5D+MOVF+f%2Cd.jpg "Move f. Operación. (f) --> (dest) Sintaxis. [Etiqueta] MOVF f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. El contenido del registro f se carga en el registro destino dependiendo del valor de d. Si d=0 el destino es el registro W, si d=1 el destino es el propio registro f . Esta instrucción permite verificar dicho registro ya que el flag Z queda afectado. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Z Se pone a 1 si el resultado de la operación es cero. EJEMPLO: MOVF FSR,0. Al ejecutarse: W = al valor del FSR.")
70
MOVWF Move W to f Operación (W)--> (f) Sintaxis [Etiqueta] MOVWF f
Move W to f Operación (W)--> (f) Sintaxis [Etiqueta] MOVWF f Operadores 0 ≤ f ≤ 127 Palabras 1 Ciclos Código de Operación 00 0000 1fff ffff Descripción Mueve el contenido del registro W al registro f Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - EJEMPLO: MOVWF OPTION Si antes de la instrucción. OPTION = FF h W = 4F h Al ejecutarse: OPTION = 4F h
![MOVWF Move W to f Operación (W)--> (f) Sintaxis [Etiqueta] MOVWF f](http://slideplayer.es/slide/9890193/32/images/70/MOVWF+Move+W+to+f+Operaci%C3%B3n+%28W%29--%3E+%28f%29+Sintaxis+%5BEtiqueta%5D+MOVWF+f.jpg "Move W to f. Operación. (W)--> (f) Sintaxis. [Etiqueta] MOVWF f. Operadores. 0 ≤ f ≤ 127. Palabras. 1. Ciclos. Código de Operación fff. ffff. Descripción. Mueve el contenido del registro W al registro f. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. - EJEMPLO: MOVWF OPTION. Si antes de la instrucción. OPTION = FF h. W = 4F h. Al ejecutarse: OPTION = 4F h.")
71
NOP No operation Operación no operación Sintaxis [Etiqueta] NOP
No operation Operación no operación Sintaxis [Etiqueta] NOP Operadores No tiene Palabras 1 Ciclos Código de Operación 00 0000 0xx0 Descripción No realiza operación alguna. En realidad, se consume un ciclo de instrucción sin hacer nada. PA2 PA1 PA0 TO# PD# Z DC C - Registro de STATUS EJEMPLO: NOP
![NOP No operation Operación no operación Sintaxis [Etiqueta] NOP](http://slideplayer.es/slide/9890193/32/images/71/NOP+No+operation+Operaci%C3%B3n+no+operaci%C3%B3n+Sintaxis+%5BEtiqueta%5D+NOP.jpg "No operation. Operación. no operación. Sintaxis. [Etiqueta] NOP. Operadores. No tiene. Palabras. 1. Ciclos. Código de Operación xx0. Descripción. No realiza operación alguna. En realidad, se consume un ciclo de instrucción sin hacer nada. PA2. PA1. PA0. TO# PD# Z. DC. C. - Registro de STATUS. EJEMPLO: NOP.")
72
RETFIE Return from Interrupt Operación TOS --> PC 1 --> GIE
Return from Interrupt Operación TOS --> PC 1 --> GIE Sintaxis [Etiqueta] RETFIE Operadores No tiene Palabras 1 Ciclos 2 Código de Operación 00 0000 1001 Descripción Carga el PC con el valor que se encuentra en la parte alta de la Pila, asegurando así la vuelta de la interrupción. Pone a 1 el bit GIE, con el fin de autorizar de nuevo que se tengan en cuenta las interrupciones. PA2 PA1 PA0 TO# PD# Z DC C - Registro de STATUS EJEMPLO: RETFIE Al ejecutarse: PC = TOS GIE = 1

73
Return with Literal in W
RETLW Return with Literal in W Operación k --> (W); TOS ---> PC Sintaxis [Etiqueta] RETLW k Operadores 0 < K < 255 Palabras 1 Ciclos 2 Código de Operación 11 01xx kkkk Descripción Carga el registro W con el literal k, y después carga el PC con el valor que se encuentra en la parte superior de la PILA, efectuando así un retorno de subrutina. EJEMPLO: CALL TABLA ;W contiene tabla . ; el valor offset . ;W nuevo valor de tabla TABLA: ADDWF PC ;W = offset RETLW k1 ; Nueva Tabla RETLW k2 . RETLW kn ;Fin de tabla Antes de ejecutarse la instrucción W = 07 h Al ejecutarse la instrucción W = Toma el valor de k7 Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C -
; TOS ---> PC. Sintaxis. [Etiqueta] RETLW k. Operadores. 0 < K < 255. Palabras. 1. Ciclos. 2. Código de Operación xx. kkkk. Descripción. Carga el registro W con el literal k, y después carga el PC con el valor que se encuentra en la parte superior de la PILA, efectuando así un retorno de subrutina. EJEMPLO: CALL TABLA ;W contiene tabla. . ; el valor offset. . ;W nuevo valor de tabla. TABLA: ADDWF PC ;W = offset. RETLW k1 ; Nueva Tabla. RETLW k2. . RETLW kn ;Fin de tabla. Antes de ejecutarse la instrucción W = 07 h. Al ejecutarse la instrucción W = Toma el valor de k7. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C. -")
74
Return from Subroutine
Return from Subroutine Operación TOS ---> PC Sintaxis [Etiqueta] RETURN Operadores No tiene Palabras 1 Ciclos 2 Código de Operación 00 0000 1000 Descripción Carga el PC con el valor que se encuentra en la parte superior de la PILA, efectuando así un retorno de subrutina Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C -

75
Rotate Left f through Carry
RLF Rotate Left f through Carry Operación Sintaxis [Etiqueta] RLF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 1101 dfff ffff Descripción Rotación de un bit a la izquierda del contenido del registro f, pasando por el bit de acarreo C. Si d=1 el resultado se almacena en f, si d=0 el resultado se almacena en W. EJEMPLO: RLF REG1,0 Si antes de la instrucción. REG1 = b flag C = 0 Como d= 0 el resultado queda en W Al ejecutarse: REG1 = b W = b flag C = 1 Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X

76
Rotate Right f through Carry
RRF Rotate Right f through Carry Operación Sintaxis [Etiqueta] RRF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 1100 dfff ffff Descripción Rotación de un bit a la derecha del contenido del registro f, pasando por el bit de acarreo C. Si d=1 el resultado se almacena en f, si d=0 el resultado se almacena en W EJEMPLO: RRF REG1,0 Si antes de la instrucción. REG1 = b flag C = 1 Como d= 0 el resultado queda en W Al ejecutarse: REG1 = b W = b flag C = 0 Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - X

77
SLEEP TO Se pone a 1 al ejecutar la instrucción SLEEP o CLRWDT
Sleep Operación 00h ---> WDT 0 ---> WDT prescaler 1 ---> TO# 0 --> PD# Sintaxis [Etiqueta] SLEEP Operadores No tiene Palabras 1 Ciclos Código de Operación 00 0000 0110 0011 Descripción Pone al circuito en modo Sleep (bajo consumo) con parada del oscilador. Pone a 0 el flag PD# (Power Down) y el flag TO# (Timer Out) se pone a 1. Se puede salir de este estado por: Activación de MCLR para provocar un Reset Desbordamiento del Watchdog si quedó operativo en el modo reposo Generación de una interrupción que no sea TMR0 ya que ésta se desactiva con la instrucción SLEEP. Registro de STATUS PA2 PA1 PA0 TO# PD# Z DC C - 1 TO Se pone a 1 al ejecutar la instrucción SLEEP o CLRWDT PD Se pone a 0 al ejecutar la instrucción SLEEP EJEMPLO: SLEEP
 con parada del oscilador. Pone a 0 el flag PD# (Power Down) y el flag TO# (Timer Out) se pone a 1. Se puede salir de este estado por: Activación de MCLR para provocar un Reset. Desbordamiento del Watchdog si quedó operativo en el modo reposo. Generación de una interrupción que no sea TMR0 ya que ésta se desactiva con la instrucción SLEEP. Registro de STATUS. PA2. PA1. PA0. TO# PD# Z. DC. C TO Se pone a 1 al ejecutar la instrucción SLEEP o CLRWDT. PD Se pone a 0 al ejecutar la instrucción SLEEP. EJEMPLO: SLEEP.")
78
Subtract W from Literal
SUBLW Subtract W from Literal Operación k - (W) ---> (W) Sintaxis [Etiqueta] SUBLW k Operadores 0 < k < 255 Palabras 1 Ciclos Código de Operación. 11 110x Kkkk kkkk Descripción Resta en complemento a dos del contenido del literal k el contenido del registro W, y almacena el resultado en W. PA2 PA1 PA0 TO# PD# Z DC C - X Registro de STATUS
 ---> (W) Sintaxis. [Etiqueta] SUBLW k. Operadores. 0 < k < 255. Palabras. 1. Ciclos. Código de Operación x. Kkkk. kkkk. Descripción. Resta en complemento a dos del contenido del literal k el contenido del registro W, y almacena el resultado en W. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Registro de STATUS.")
79
Z Se pone a 1 si el resultado de la operación es cero
DC Se pone a 1 si se genera un acarreo del bit 3 al grupo de 4 bits superior C Se pone a 1 si se genera un acarreo del bit de mayor peso EJEMPLO: SUBLW 0x 02 Si antes de la instrucción. W = 01 h flag C = ? Al ejecutarse: W = 01 flag C = 1 ; el resultado es positivo Si antes de la instrucción. W = 02 h flag Z = ? Al ejecutarse: W = 00 h flag C = 1 ; el resultado es cero flag Z = 1 Si antes de la instrucción. W = 03 h Al ejecutarse: W = FF h flag C = 0 ; el resultado es negativo

80
(f) - (W) ---> (dest)
SUBWF Subtract W from f Operación (f) - (W) ---> (dest) Sintaxis [Etiqueta] SUBW f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 0010 dfff ffff Descripción Resta en complemento a dos el contenido del registro f menos el contenido del registro W almacena el resultado en W si d=0 y en f si d=1. PA2 PA1 PA0 TO# PD# Z DC C - X Registro de STATUS
 - (W) ---> (dest) Sintaxis. [Etiqueta] SUBW f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Resta en complemento a dos el contenido del registro f menos el contenido del registro W almacena el resultado en W si d=0 y en f si d=1. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Registro de STATUS.")
81
Z Se pone a 1 si el resultado de la operación es cero
DC Se pone a 1 si se genera un acarreo del bit 3 al grupo de 4 bits superior C Se pone a 1 si se genera un acarreo del bit de mayor peso EJEMPLO: SUBWF REG1,1 a) Si antes de la instrucción. REG1 = 03 h W = 02 h flag C = ? Al ejecutarse REG1 = 01h W = 02 h flag C = 1 ; el resultado es positivo b) Si antes de la instrucción. REG1 = 02 h Al ejecutarse REG1 = 00h flag C = 1 ; el resultado es cero falz Z = 1 ; el resultado es cero c) Si antes de la instrucción. REG1 = 01 h bit C = ? W = FF h flag C = 0 ; el resultado es negativo
 Si antes de la instrucción. REG1 = 03 h. W = 02 h. flag C = Al ejecutarse REG1 = 01h. W = 02 h. flag C = 1 ; el resultado es positivo. b) Si antes de la instrucción. REG1 = 02 h. Al ejecutarse REG1 = 00h. flag C = 1 ; el resultado es cero. falz Z = 1 ; el resultado es cero. c) Si antes de la instrucción. REG1 = 01 h. bit C = W = FF h. flag C = 0 ; el resultado es negativo.")
82
SWAPF EJEMPLO: SWAPF REG1,0
Swap Nibbles in f Operación (f<3:0>) ---> (dest <7:4>) (f<7:4>) ---> (dest <3:0>) Sintaxis [Etiqueta] SWAPF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 1110 dfff ffff Descripción Los cuatro bits de más peso del registro f se intercambian con los 4 bits de menos peso del mismo registro. Si d=0 el resultado se almacena en W, si d=1 el resultado se almacena en f. PA2 PA1 PA0 TO# PD# Z DC C - Registro de STATUS EJEMPLO: SWAPF REG1,0 Si antes de la instrucción. REG1 = A5 h = h Como d=0 el resultado se almacenará en W Al ejecutarse la instrucción: REG1 = A5 h = b W = 5A h = b
 ---> (dest <7:4>) (f<7:4>) ---> (dest <3:0>) Sintaxis. [Etiqueta] SWAPF f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Los cuatro bits de más peso del registro f se intercambian con los 4 bits de menos peso del mismo registro. Si d=0 el resultado se almacena en W, si d=1 el resultado se almacena en f. PA2. PA1. PA0. TO# PD# Z. DC. C. - Registro de STATUS. EJEMPLO: SWAPF REG1,0. Si antes de la instrucción. REG1 = A5 h = h. Como d=0 el resultado se almacenará en W. Al ejecutarse la instrucción: REG1 = A5 h = b. W = 5A h = b.")
83
Exclusive OR Literal With k
XORLW Exclusive OR Literal With k Operación (W).XOR.k ---> (W) Sintaxis [Etiqueta] XORLW k Operadores 0 < f < 255 Palabras 1 Ciclos Código de Operación 11 1010 kkkk Descripción Realiza la función OR-Exclusiva entre el contenido del registro W y la constante k de 8 bits. El resultado se almacena en W PA2 PA1 PA0 TO# PD# Z DC C - X Registro de STATUS Z Se pone a 1 si el resultado de la última operación es cero EJEMPLO: XORLW 0xAF Si antes de la instrucción. W = b = B5 h Al ejecutarse la instrucción: W = b Å b = b = 1A h
.XOR.k ---> (W) Sintaxis. [Etiqueta] XORLW k. Operadores. 0 < f < 255. Palabras. 1. Ciclos. Código de Operación kkkk. Descripción. Realiza la función OR-Exclusiva entre el contenido del registro W y la constante k de 8 bits. El resultado se almacena en W. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Registro de STATUS. Z Se pone a 1 si el resultado de la última operación es cero. EJEMPLO: XORLW 0xAF. Si antes de la instrucción. W = b = B5 h. Al ejecutarse la instrucción: W = b Å b = b = 1A h.")
84
(W).XOR.(f) ---> (des)
XORWF Exclusive OR With f Operación (W).XOR.(f) ---> (des) Sintaxis [Etiqueta] XORWF f,d Operadores 0 < f < 127 d [0,1] Palabras 1 Ciclos Código de Operación 00 0110 dfff ffff Descripción Realiza la función OR-Exclusiva entre el contenido del registro W y el contenido del registro f, y almacena el resultado en f si d=1 y en W si f=0 PA2 PA1 PA0 TO# PD# Z DC C - X Registro de STATUS EJEMPLO: XORWF REG1,1 Si antes de la instrucción. REG1 = AF h = b W = B5 h = b Como d=1, el resultado se almacena en REG1 Al ejecutarse: REG1 = Å = = 1A h W = B5 h
.XOR.(f) ---> (des) Sintaxis. [Etiqueta] XORWF f,d. Operadores. 0 < f < 127. d [0,1] Palabras. 1. Ciclos. Código de Operación dfff. ffff. Descripción. Realiza la función OR-Exclusiva entre el contenido del registro W y el contenido del registro f, y almacena el resultado en f si d=1 y en W si f=0. PA2. PA1. PA0. TO# PD# Z. DC. C. - X. Registro de STATUS. EJEMPLO: XORWF REG1,1. Si antes de la instrucción. REG1 = AF h = b. W = B5 h = b. Como d=1, el resultado se almacena en REG1. Al ejecutarse: REG1 = Å = = 1A h. W = B5 h.")
85
CONFIGURACION DE MPLAB
Instale el programa MPLAB IDE versión 8.86 o superior. 1)Iniciar el programa MPLAB
Iniciar el programa MPLAB.")
86
2)Maximizar la hoja de trabajo
Maximizar la hoja de trabajo")
87
3)Elegir el tipo de mocrocontrolador.
Configure/selet/pic16f84

88
4)Elegir el tipo de depurador.
Debugger/select tool/mplab sim

89
5)Elegir la frecuencia del oscilador
Debugger/settings/clock 4 mhz

90
6)CREAR UNA CARPETA EN “ARCHIVOS DE PROGRAMA” EN DONDE SE GUARDARAN LOS PROGRAMAS QUE DISEÑE ,PUEDE LLAMARLA “MIPIC” Edit/properties/editor options Activar las opciones mostradas

91
7)CREAR ARCHIVO FUENTE NUEVO:
File/new SALVARLO DENTRO DE LA CARPETA “MIPIC” COMO primero.asm

92
8)Para visualizar el numero de líneas, tipo de letra etc. seleccione
Edit/properties/asm.filetipes Activar las opciones mostradas.

93
9)ENSAMBALDO DEL PROGRAMA
UNA vez editado el programa se ensambla el archivo fuente. Project/quickbuilder primero.asm (alt F10)
")
94
10)Si la pantalla muestra BUIL SUCCEDEE, el ensamblado ha tenido éxito
10)Si la pantalla muestra BUIL SUCCEDEE, el ensamblado ha tenido éxito.FELICIDADES, de otro modo revise los ERRORS y corrija.
Si la pantalla muestra BUIL SUCCEDEE, el ensamblado ha tenido éxito.FELICIDADES, de otro modo revise los ERRORS y corrija.")
96
11)El proceso de ensamblado produce un archivo (
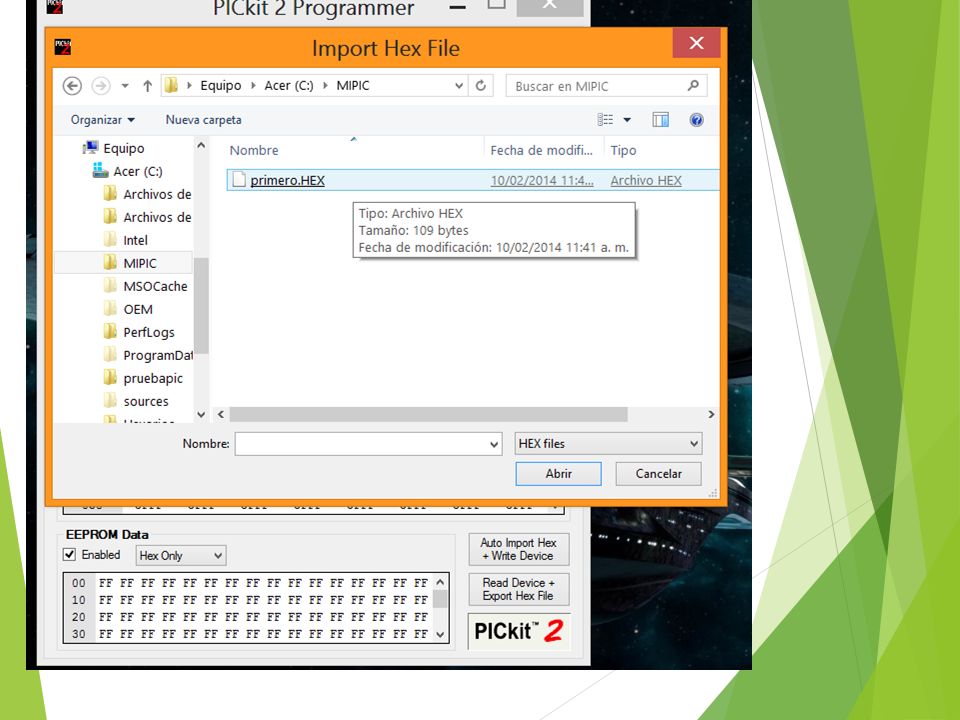
11)El proceso de ensamblado produce un archivo (*.hex), que es el que se grabara en la memoria de programa del PIC. Para visualizarlo seleccionar : FILE/OPEN/ALL FILLES/PRIMERO.HEX
El proceso de ensamblado produce un archivo (*.hex), que es el que se grabara en la memoria de programa del PIC. Para visualizarlo seleccionar : FILE/OPEN/ALL FILLES/PRIMERO.HEX.")
97
12) ESTE ARCHIVO SOLO CONTIENE NUMEROS HEXADECIMALES PARA REPRESENTAR LOS UNOS Y DEROS BINARIOS DE LA INFORMACION
 ESTE ARCHIVO SOLO CONTIENE NUMEROS HEXADECIMALES PARA REPRESENTAR LOS UNOS Y DEROS BINARIOS DE LA INFORMACION")
98
CONECTE EL PROGRAMADOR DE PICS CON EL PIC YA INSTALADO Y CONECTADO AL PC, ELIJA EL PROGRAMA QUE GRABARA EN EL PIC ELEGIDO, IMPORTE EL PROGRAMA EN HEXADECIMAL

100
UNA VEZ IMPORTADO EL PORGRAMA EN FORMATO HEXADECIMAL, DE CLICK EN WRITE y compruebe que se ha grabado el programa.

101
COLOQUE EL PIC EN SU CIRCUITO Y SI REALIZA LO QUE USTED QUERIA………
COLOQUE EL PIC EN SU CIRCUITO Y SI REALIZA LO QUE USTED QUERIA……….FELICIDADES

Presentaciones similares