Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Controladores Lógicos Programables
Jose M.Mansilla Curso Basico Controladores Lógicos Programables

2
Introduccion ¿Que es un PLC?
Las siglas PLC vienen del inglés PROGRAMMABLE LOGIC CONTROLLER que traducido significa Controlador lógico programable. Podríamos definirlo como un procesador dedicado a controlar un sistema o proceso industrial. El PLC forma parte de un sistema de control, ya que por si solo no puede cumplir su función, necesita de elementos que indiquen el estado del sistema, elementos que tomen acción sobre el sistema y elementos de interacción con el hombre. Es el conjunto lo que denominamos sistema de control.

3
Introduccion Un poco de historia
El PLC nace por un necesidad de la Industria Automotriz, que necesitaba un sistema de control para sus procesos que les permitiera realizar cambios de parámetros en poco tiempo para los distintos modelos, que sus operarios de mantenimiento puedan interpretar sin una capacitación elevada, y que los elementos sensores y elementos finales de control sean los existentes. Con estas pautas se empieza a construir el primer PLC que poco tiene que ver con lo hoy conocemos. Según se cuenta fue Modicon quien, en su diseño 84, construyó el primer sistema de control automático, programable, y el idioma utilizado de programación (escalera) se aproximaba a los planos eléctricos de simple interpretación para el personal de mantenimiento. Existe otra versión que le otorga a Allen Bradley la creación del PLC, de hecho el nombre PLC es marca registrada por este.
 se aproximaba a los planos eléctricos de simple interpretación para el personal de mantenimiento. Existe otra versión que le otorga a Allen Bradley la creación del PLC, de hecho el nombre PLC es marca registrada por este.")
4
Arquitectura Interna (Típica)
Introduccion Arquitectura Interna (Típica) SALIDAS ENTRADAS CPU MEMORIA MODULOS DE ENTRADA PROCESO PLC
 SALIDAS. ENTRADAS. CPU. MEMORIA. MODULOS. DE. ENTRADA. PROCESO. PLC.")
5
CPU Es la encargada de procesar los datos, leer la memoria que refleja las entradas, ejecutar un programa de usuario, y volcar el resultado de la interacción en la memoria imagen de salidas. Al proceso descrito anteriormente se lo conoce como scan, o scaneo. Es muy importante el tiempo en que la CPU realiza el scan, ya que este nos define la capacidad de proceso para controlar sistemas. Sale de esto que una CPU con tiempos de scan lento no podrá controlar sistemas con variables rápidas, y un scan rápido es innecesario para sistemas de lenta variación. Por esta razón es muy importante la selección de la CPU adecuada para cada sistema, de forma obtener la mejor relación de prestación / precio. Lee Memoria de Entradas Ejecutar Programa Usuario Actualizar Salidas

6
CPU El PLC solo mira las entradas durante la parte del tiempo de scan
dedicado al Chequeo de Entradas. En el diagrama, la entrada 1 no se ve sino hasta el scan 2. Esto es asi porque cuando la entrada 1 se puso en ON, el scan 1 ya había terminado de mirar las entradas. La entrada 2 no se ve hasta el scan 3. Esto es así porque cuando la entrada 2 se puso en ON, el scan 2 ya había terminado de mirar las entradas. La entrada 3 nunca se vera, porque cuando el scan 3 mira las entradas, la señal 3 no estaba en On aun. Se pone en OFF antes de que el scan 4 mire las entradas. Por lo tanto la entrada 3 nunca será vista por el PLC. Para evitar que esto suceda, decimos que la entrada deberia estar en ON por la menos 1 delay time de entrada + 1 tiempo de scan.

7
Memoria Memoria de Entradas / Salidas Memoria de Datos
La memoria esta dividida segun su funcion, de la forma: Memoria de Entradas / Salidas Memoria de Datos Memoria de programa de usuario

8
Memoria Memoria de Datos: Es un area de memoria con registros de 16 bits para almacenar informacion de variables de usuario, para modulos especiales, para la configuracion del PLC, para comunicaciones y bits retentivos. También hay asignada áreas para temporizadores, contadores y los PLC más avanzados tienen área de registros de bits (EM en las familias CQM1H, CJ y CS).Según los modelos será el tamaño de cada área de memoria Requiere una bateria para mantener la informacion Memoria de Entradas / Salidas: Es el área de memoria imagen de los estados de los puntos de módulos de entrada y la imagen de los valores a colocar en las salidas. Memoria de Programa: El destino de esta es almacenar el programa generado por el usuario que llevará el control de la máquina.
.Según los modelos será el tamaño de cada área de memoria. Requiere una bateria para mantener la informacion. Memoria de Entradas / Salidas: Es el área de memoria imagen de los estados de los puntos de módulos de entrada y la imagen de los valores a colocar en las salidas. Memoria de Programa: El destino de esta es almacenar el programa generado por el usuario que llevará el control de la máquina.")
9
Memoria de entradas/salidas
Bit 15 Area de E/S Area de entradas y salidas basicas CIO Area de Data Link Area de datos (Data Link) para las redes de Controller Link CIO Area Interna de E/S Este área sólo se puede emplear por programa; no se puede utilizar para Unidades Básicas de E/S. Es posible que esta área sea asignada a nuevas funciones en el futuro. CIO Area especial de E/S Area de entradas y salidas para modulos especiales CIO
 para las redes de Controller Link. CIO Area Interna de E/S. Este área sólo se puede emplear por programa; no se puede utilizar para Unidades Básicas de E/S. Es posible que esta área sea asignada a nuevas funciones en el futuro. CIO Area especial de E/S. Area de entradas y salidas para modulos especiales. CIO")
10
Area de trabajo WR Area HR
Bit 15 Este área sólo se puede emplear por programa; no se puede utilizar con entradas o salidas de ningun tipo Area HR Bit 15 Los datos de este area de memoria son mantenidos aun apagando el equipo.

11
Area de temporizaadores
Bit 15 Nos permite manejar hasta 4096 temporizadores independientes! Area de contadores Bit 15 Nos permite manejar hasta 4096 contadores independientes!

12
Area de registros Auxiliares
Word A000 15 El área auxiliar contiene flags y bits de control que sirven para controlar y monitorizar la operación del PLC. Este área está dividida en dos partes: A000 a A447 de sólo lectura y A448 a A959 de lectura y escritura. Area de sólo Lectura A447 A448 Area de Lectura-Escritura A959

13
Area de datos DM Word D00000 D20000 D29599 D30000 D31599 D32767
Area de Unidades Especiales de E/S (100 palabras/Unidad) El área de DM es un área de datos de multi-propósito. Sólo puede ser accedida a nivel de palabra y no de bit. Este área retiene su estado ante fallos de alimentación o al cambiar de PROGRAM a MONITOR o RUN. D29599 D30000 Area de Unidades de BUS (100 palabras/Unidad) D31599 D32767
 El área de DM es un área de datos de multi-propósito. Sólo puede ser accedida a nivel de palabra y no de bit. Este área retiene su estado ante fallos de alimentación o al cambiar de PROGRAM a MONITOR o RUN. D D Area de Unidades de BUS (100 palabras/Unidad) D D")
14
Tipos de PLCs

15
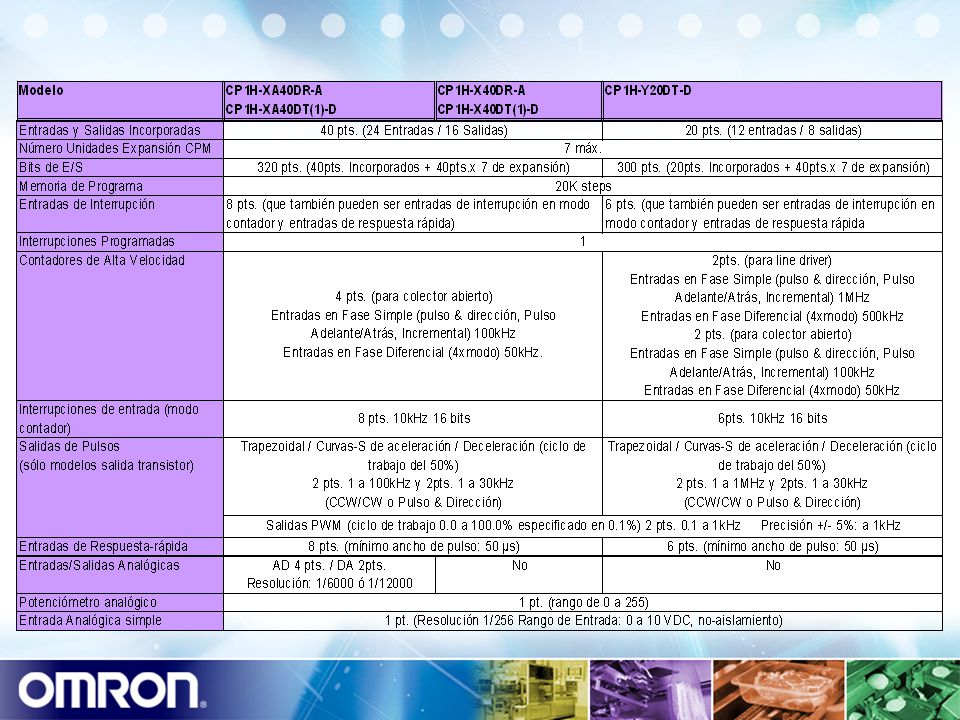
PLCs Compactos CPM1A CPM2A CP1H

16
PLCs Compactos Es un solo bloque que incorpora la CPU, las entradas y las salidas Las entradas y las salidas ya tienen asignada el area de memoria de entradas y salidas que van a ocupar. Se pueden expandir con modulos adicionales, que tambien tienen fijo el direccionamiento

17
CPM1A CPM2A CPU I/O 10, 20, 30, 40 20, 30, 40, 60 Max I/O 100 120 Alimentación 24 Vdc – 100 a 240Vac Mem. de Prog. 2 K 4 K Tiempo por instr. 0.76 microseg. 0.64 microseg. Nº de instr. 91 119 Contador alta vel. 5 KHz 20 KHz Salida de pulsos 2 KHz 10 KHz I/O analógicas Módulo de Expansión Conectividad HostLink, NTLink 1:1, CompoBus/S Slave, DeviceNet Slave, Profibus-DP Slave Built in ports Periférico Periférico + RS232

19
PLCs modulares Sin Backplane CPM2C CQM1H

20
PLCs modulares Sin Backplane
Los modulos de entrada y salida se instalan segun el requerimiento de la aplicacion. Los modulos ya tienen asignados areas de memoria de entrada y salida El usuario elige libremente la cantidad de entradas y salidas a emplear.

21
PLCs modulares Sin Backplane SERIE CJ

22
PLCs modulares Sin Backplane CPU Rack Hasta 4 Expanxiones
¡¡¡ CJ1M hasta 640 I/O CJ1 hasta remotos !!! Expansion 1 Tiempo de ejución 0,1 microseg. en CJ1M ¡¡ CJ1 0,02 microseg.!! Expansion 2 Soporte de una expansión en CJ1M ¡¡ 3 Expansiones e CJ1 !! Expansion 3 Longitud máx. Del Bus de Expansión = 12 m. Cables 0.3, 0.7, 2.0, 3.0, 5.0, 10.0, 12.0

23
PLCs modulares Con Backplane Familia CS1

24
PLCs modulares Con Backplane Familia CS1

25
Familia CS1 Hasta 5120 E/S, con 7 Racks de Expansión
80 Módulos Especiales 16 Módulos de Comunicaciones 100 Nodos para DeviceNet 5 Racks de Remotas +32 Esclavos SYSBUS Capacidad de E/S, Velocidad y Memoria Comunicaciones serie, Protocol Macro, Ethernet y Controller Link. Manejo de Información. Programación:Por Tarea Nuevas Instrucciones.

26
Tendencia de Posicionamiento de Productos
CS1 Funcionalidad CJ1 CQM1H CPM2A CPM2C CPM1A Capacidad de Programación

27
Sistemas de numeración

28
Sistemas de numeración
LAS VARIABLES, EN GENERAL, PUEDEN EXPRESARSE O REPRESENTARSE SEGÚN DISTINTOS SISTEMAS DE NUMERACIÓN EL SISTEMA HABITUAL QUE SE EMPLEA DE FORMA COTIDIANA ES EL SISTEMA DIGITAL, QUE UTILIZA LOS SÍMBOLOS DEL 0 AL 9. HAY OTROS SISTEMAS DE NUMERACION QUE, AL TRABAJAR CON MÁQUINAS Y CON COMUNICACIONES, NOS APARECERÁN CONSTANTEMENTE BINARIO BCD (BINARIO CODIFICADO DECIMAL) HEXADECIMAL COMA FLOTANTE GRAY ASCII
 HEXADECIMAL. COMA FLOTANTE. GRAY. ASCII.")
29
Sistemas de numeración
CODIGO BINARIO UTILIZA LOS SIMBOLOS (1 y 0) PARA REPRESENTAR CUALQUIER VALOR LA FORMULA DE CONVERSION DE UN NUMERO DECIMAL A UN NUMERO BINARIO ES LA SIGUIENTE : DONDE Zi ES UNO DE LOS 2 SIMBOLOS (0 ó 1)
 PARA REPRESENTAR CUALQUIER VALOR. LA FORMULA DE CONVERSION DE UN NUMERO DECIMAL A UN NUMERO BINARIO ES LA SIGUIENTE : DONDE Zi ES UNO DE LOS 2 SIMBOLOS (0 ó 1)")
30
Sistemas de numeración
CODIGO BINARIO EJEMPLO: LA REPRESENTACION DEL Nº12 EN BINARIO SERÁ : EJEMPLO : REPRESENTAR EN BINARIO LOS Nº DECIMALES 16 Y 45. 16 45

31
Sistemas de numeración
CODIGO HEXADECIMAL SE DESARROLLO PARA SIMPLIFICAR EL USO DE NUMEROS BINARIOS. CONSTA DE 16 DIGITOSCODIGO MEDIANTE EL CUAL CADA NUMERO DEL SISTEMA DECIMAL (0..9) SE REPRESENTA EN BINARIO (0,1). CON UN GRUPO DE 4 DIGITOS BINARIOS (BITS) SOLO SE PUEDENR REPRESENTAR 16 COMBINACIONES ON/OFF. CADA UNA DE ELLAS REPRESENTA UN DIGITO HEXADECIMAL. LA CONVERSION DIRECTA ES LA SIGUIENTE : DECIMAL BINARIO HEXA DECIMAL BINARIO HEXA A B C D E F
 SE REPRESENTA EN BINARIO (0,1). CON UN GRUPO DE 4 DIGITOS BINARIOS (BITS) SOLO SE PUEDENR REPRESENTAR 16 COMBINACIONES ON/OFF. CADA UNA DE ELLAS REPRESENTA UN DIGITO HEXADECIMAL. LA CONVERSION DIRECTA ES LA SIGUIENTE : DECIMAL BINARIO HEXA. DECIMAL BINARIO HEXA A B C D E F.")
32
Sistemas de numeración
CODIGO BCD CODIGO MEDIANTE EL CUAL CADA NUMERO DEL SISTEMA DECIMAL (0..9) SE REPRESENTA EN BINARIO (0,1). LA CONVERSION DIRECTA ES LA SIGUIENTE : DECIMAL BINARIO
 SE REPRESENTA EN BINARIO (0,1). LA CONVERSION DIRECTA ES LA SIGUIENTE : DECIMAL BINARIO")
33
Introduccion a la programacion

34
Conceptos de Direccionamiento
Canal Bit

35
Conceptos de Direccionamiento
Fijo Libre

36
Programacion Determinar los requisitos del sistema al cual se aplica el PLC. Identificar los dispositivos de E/S y asociarlos a las direcciones físicas mediante una tabla de asignación. Preparar tablas que indiquen: canales y bits de trabajo Temporizadores, contadores y saltos Dibujar el diagrama de relés. Transferir el programa a la CPU. Verificar, vía simulación, el correcto funcionamiento del programa. Memorizar el programa definitivo.

37
Programacion - En los diagramas Escalera, las señales fluyen de izquierda a derecha A SALIDA X FLUJO - En los diagramas Escalera no se pueden conectar las bobinas directamente a la barra de la izquierda

38
Programacion - El número de contactos NO esta limitado por las E/S, Relés Auxiliares Internos, contadores/temporizadores, etc.. Use tantos contactos como sea necesarios, de modo que la configuración sea simple y clara. Por ejemplo, el contacto A puede ser usado tan frecuentemente como se lo requiera A SALIDA X TIMER 1 A TIMER 1 SALIDA Y END

39
Programacion / DIAGRAMA DE RELES SIMBOLOS FUNDAMENTALES Contacto
Salida normalmente normalmente abierto cerrado

40
/ DIAGRAMA DE RELES Esquema de contactos
Permite una representación de la lógica de control similar a los esquemas electromecánicos 0100 0101 / 1000 0000

41
Introduccion a CX-Programmer

43
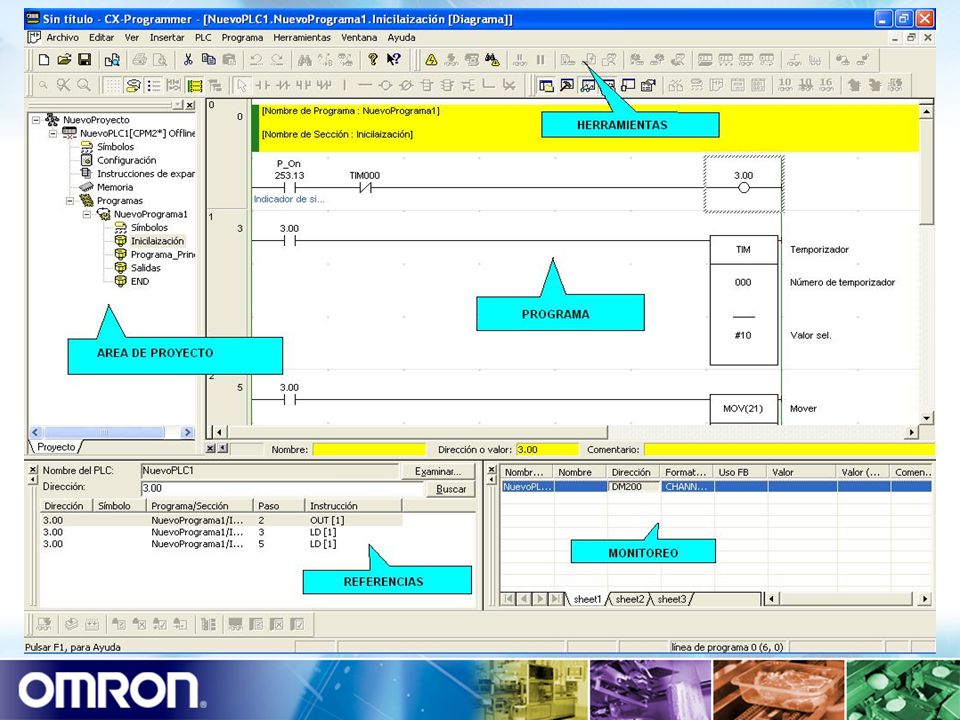
Herramientas Principales
Activación/Desactivación de la comunicación Online con el PLC. Alternar monitorización del PLC. Trabajar con simulador online. Online automático. Transferir al PLC. Transferir desde el PLC. Comparar con PLC. Modo Program Modo Depuración Modo Monitor Modo Run

44
Herramientas Principales
Reducir (zoom out). Encajar en. Aumentar (zoom in). Alternar cuadrícula. Mostrar comentarios. Mostrar anotaciones de línea de instrucción. Monitorizar en ajuste de linea de programa. Mostrar comentarios de programa/sección. Modo selección. Nuevo contacto. Nuevo contacto cerrado. Nuevo contacto OR. Nuevo contacto cerrado OR. Nueva línea vertical. Nueva línea horizontal. Nueva bobina. Nueva bobina cerrada. Nueva instrucción de PLC.
. Encajar en. Aumentar (zoom in). Alternar cuadrícula. Mostrar comentarios. Mostrar anotaciones de línea de instrucción. Monitorizar en ajuste de linea de programa. Mostrar comentarios de programa/sección. Modo selección. Nuevo contacto. Nuevo contacto cerrado. Nuevo contacto OR. Nuevo contacto cerrado OR. Nueva línea vertical. Nueva línea horizontal. Nueva bobina. Nueva bobina cerrada. Nueva instrucción de PLC.")
45
Herramientas Principales
Activar ventana de monitorización. Compilar programa de PLC. Compilar todos los programas de PLC. Edición On-Line de líneas de programa. Cancelar edición On-Line. Enviar cambios de edición On-Line. Ir a edición online de linea de programa. Administrador de secciones/lineas de programa.

46
Herramientas Principales
Alternar área de trabajo del proyecto. Alternar ventana de salida. Alternar ventana de monitorización de variables. Mostrar herramienta de referencia de dirección. Mostrar propiedades. Informe de referencia cruzada. Ver símbolos locales. Ver diagrama de contactos. Ver código mnemónico. Ver comentarios de E/S. Monitorizar en hexadecimal.

47
Area de proyecto La carpeta de proyecto agrupa varios tipos de Editores necesarios para la completa elaboración del proyecto. Cada uno de ellos tiene un menú accesible mediante el botón derecho del ratón. Haciendo doble click sobre cada opción en la carpeta de proyecto, se accede al Editor correspondiente. Propiedades del PLC Información del proyecto Editor de Variables Globales Editor de la Tabla de E/S Configuración del PLC Editor/Monitor de las áreas de memoria Gestión de la Memory Card (sólo CS1/CJ1) Editor de Variables Locales Visualización de errores Reloj del PLC Editor de sección (bloque) de programa Información de la tarea
 Editor de Variables Locales. Visualización de errores. Reloj del PLC. Editor de sección (bloque) de programa. Información de la tarea.")
48
Ventana de Memoria Haciendo doble click sobre “Memoria” en la carpeta de proyecto o bien seleccionando “PLC” “Editar” “Memoria”, se accede al editor de áreas de memoria, donde se podrán editar y visualizar los contenidos de las distintas áreas del PLC. Gestión de ficheros Formato de visualización - Bit - Palabra BCD - Entero sin signo - Entero con signo - Coma flotante - Hexadecimal - ASCII - Doble coma flotante Rellenar y borrar área de datos Ventana de visualización de datos Áreas del PLC

49
Ventana de Simbolos Dentro del editor de variables globales se declararán las variables que serán comunes a cualquiera de las tareas que se definan para el proyecto. Las variables creadas en los editores de variables locales sólo serán visibles en la tarea (programa) donde hayan sido creadas y no en las demás.
 donde hayan sido creadas y no en las demás.")
50
Ventana de Simbolos Es posible importar y exportar definiciones de símbolos desde otro paquete de software, tal como una hoja de cálculo. La información se transfiere en formato texto, así es posible incluso usar un procesador de texto para definir un juego de Símbolos y utilizarlos dentro de CX-Programmer. Para importar una lista de variables desde Excel, basta con seleccionarla desde Excel y pegarla en el editor de variables del CX-Programmer.

51
Ventana de Simbolos Excel Copiar y pegar CX-Programmer

52
Ventana de Error (On Line)
Haciendo doble click sobre “Registro de Error” en la carpeta de proyecto o seleccionando “PLC” “Editar” “Registro de error”, se accede a una ventana donde se puede visualizar qué error se está produciendo en ése momento en el PLC, así como el histórico de errores del PLC. Pulsando “Borrar Todo” se eliminan todos los errores del histórico. Para cada error se especifica la fecha y hora en que se produjo, el código del error y una breve descripción del mismo.

53
Reloj del PLC (On Line) Haciendo doble click sobre “Reloj del PLC” en la carpeta de proyecto o seleccionando “PLC” “Editar” “Reloj”, se accede a una ventana desde donde es posible cambiar la hora del PLC fácilmente pinchando sobre un botón que sincroniza la hora del PLC con la del Ordenador.

54
Tabla de entradas y salidas
Haciendo doble click sobre “Tabla de E/S” en la carpeta de proyecto o desde “PLC” “Editar” “Tabla E/S”, se accede al editor de la tabla de E/S donde se podrá gestionar (crear, comparar, verificar, etc…) la tabla de E/S del PLC conectado haciendo click sobre “Opciones”. CPU del PLC Rack principal Módulos montados en el rack. Número de unidad Posición en el rack Primer canal asignado a la unidad
 la tabla de E/S del PLC conectado haciendo click sobre Opciones . CPU del PLC. Rack principal. Módulos montados en el rack. Número de unidad. Posición en el rack. Primer canal asignado a la unidad.")
55
Instrucciones basicas

56
Instrucciones basicas
LA INSTRUCCIÓN TIM (TEMPORIZADOR) SE UTILIZA PARA GENERAR UN RETARDO A LA CONEXIÓN, RESPECTO A LA SEÑAL DE HABILITACIÓN “START” EL RETARDO (SV) PUEDE VARIAR ENTRE 0 Y s, Y ES PROGRAMABLE EN UNIDADES DE 0.1 s.. CUANDO “START” PONE A ON, EL VALOR ACTUAL DEL TIM (PV, INICIALMENTE PUESTO A SV) EMPIEZA A DECREMENTARSE. CUANDO PV => 0, EL CONTACTO TIM SE PONE A ON Y EXCITA LA SALIDA CUANDO “START” PASA A OFF, EL CONTACTO TIM SE PONE A OFF, PV=SV Y EL TEMPORIZADOR ES RESETEADO Y PREPARADO DE NUEVO
 SE UTILIZA PARA GENERAR UN. RETARDO A LA CONEXIÓN, RESPECTO A LA SEÑAL DE HABILITACIÓN START EL RETARDO (SV) PUEDE VARIAR ENTRE 0 Y s, Y ES PROGRAMABLE EN. UNIDADES DE 0.1 s.. CUANDO START PONE A ON, EL VALOR ACTUAL DEL TIM (PV, INICIALMENTE. PUESTO A SV) EMPIEZA A DECREMENTARSE. CUANDO PV => 0, EL CONTACTO TIM SE PONE A ON Y EXCITA LA SALIDA. CUANDO START PASA A OFF, EL CONTACTO TIM SE PONE A OFF, PV=SV Y EL. TEMPORIZADOR ES RESETEADO Y PREPARADO DE NUEVO.")
57
Instrucciones basicas
EJEMPLO DE APLICACION DE TIM PARA OPERAR COMO OFF DELAY

58
Instrucciones basicas
EJEMPLO DE TEMPORIZADORES CONECTADOS EN CASCADA: SE OBTIENE UN TEMPORIZADOR CON VALOR DE PRESELECCIÓN SV POR LA SUMA DE SV1+SV2

59
Instrucciones basicas
LOS TIMERS RAPIDOS (TIMH) TIENEN UNA BASE DE TIEMPO DE 0,01 SEGUNDOS.
 TIENEN UNA BASE DE TIEMPO DE 0,01 SEGUNDOS.")
60
Instrucciones basicas
LA INSTRUCCIÓN CNT REALIZA LA FUNCIÓN DE UN CONTADOR CON PRESELECCIÓN EL VALOR DE PRESELECCIÓN (SV) PUEDE VARIAR ENTRE 0…9999 EL CONTADOR TIENE DOS ENTRADAS: - Cp CONTEO DE PULSOS - Rt RESET EL FLANCO DE SUBIDA DE Cp DETERMINA EL DECREMENTO DE PV (SI Rt= OFF) EN UNA UNIDAD CUANDO PV =>0, EL CONTACTO DEL CNT SE PONE A ON CUANDO Rt SE PONE A ON, EL CNT SE PREPARA DE NUEVO EN CONDICIONES DE RESET (CONTACTO=0, PV=SV)
 PUEDE VARIAR ENTRE 0…9999. EL CONTADOR TIENE DOS ENTRADAS: - Cp CONTEO DE PULSOS. - Rt RESET. EL FLANCO DE SUBIDA DE Cp DETERMINA EL DECREMENTO DE PV (SI Rt= OFF) EN UNA UNIDAD. CUANDO PV =>0, EL CONTACTO DEL CNT SE PONE A ON. CUANDO Rt SE PONE A ON, EL CNT SE PREPARA DE NUEVO EN. CONDICIONES DE RESET (CONTACTO=0, PV=SV)")
61
Instrucciones basicas
EL CNT ES RETENTIVO Y CONSERVA SU ESTADO (CONTACTO , PV) MANTENIDO INCLUSO ANTE UN FALLO DE TENSIÓN O CAMBIO DE MODO DE OPERACIÓN DE LA CPU CUANDO PV=0, (CONTACTO A ON) LOS SIGUIENTES PULSOS DE ENTRADA SE IGNORAN ACOPLADO A UNA BASE DE TIEMPOS DEL SISTEMA, UN CNT PUEDE SER UTILIZADO COMO TEMPORIZADOR RETENTIVO ACOPLANDO 2 CNT EN CASCADA, SE OBTIENE UN CONTEO RESULTADO DEL PRODUCTO DE PV1 Y PV2
 MANTENIDO INCLUSO ANTE UN FALLO DE TENSIÓN O CAMBIO DE MODO DE. OPERACIÓN DE LA CPU. CUANDO PV=0, (CONTACTO A ON) LOS SIGUIENTES PULSOS DE ENTRADA SE. IGNORAN. ACOPLADO A UNA BASE DE TIEMPOS DEL SISTEMA, UN CNT PUEDE SER. UTILIZADO COMO TEMPORIZADOR RETENTIVO. ACOPLANDO 2 CNT EN CASCADA, SE OBTIENE UN CONTEO RESULTADO. DEL PRODUCTO DE PV1 Y PV2.")
62
Instrucciones basicas
EJEMPLO DE CONTADORES UTILIZADOS COMO TEMPORIZADORES SE UTILIZA SR (1s) o P_1s LA ENTRADA DE ACTIVACIÓN DEL TEMPORIZADOR ES AQUÍ LA ENTRADA DE RESET DEL CNT
 o P_1s. LA ENTRADA DE ACTIVACIÓN DEL TEMPORIZADOR ES AQUÍ LA ENTRADA DE RESET DEL CNT.")
63
Instrucciones basicas
EL CNTR ES UN CONTADOR REVERSIBLE. ES DECIR TIENE UNA ENTRADA DE CONTEO ASCENDENTE Y UNA DE CONTEO DESCENDENTE.

64
Instrucciones basicas
LA INSTRUCCIÓN DIFU PERMITE CREAR UN PULSO QUE PERMANECE ACTIVO POR 1 CICLO DE SCAN. REQUIERE LA ASIGNACION DE 1 BIT ADICIONAL LA INSTRUCCION UP NO REQUIERE BIT ADICIONAL, CON EL MISMO RESULTADO AMBAS DETECTAN FLANCO ASCENDENTE

65
Instrucciones basicas
LA INSTRUCCIÓN DIFD PERMITE CREAR UN PULSO QUE PERMANECE ACTIVO POR 1 CICLO DE SCAN. REQUIERE LA ASIGNACION DE 1 BIT ADICIONAL LA INSTRUCCION DOWN NO REQUIERE BIT ADICIONAL, CON EL MISMO RESULTADO AMBAS DETECTAN FLANCO DESCENDENTE

66
Instrucciones basicas
LA INSTRUCCIÓN KEEP PERMITE CREAR UN RELÉ DE ENCLAVAMIENTO. SI TENEMOS DOS ENTRADAS: — S - SET — R - SET CON R=OFF , UN IMPULSO SOBRE S ACTIVA DE FORMA PERMANENTE EL BIT PROGRAMADO COMO SALIDA. UN IMPULSO SOBRE R DETERMINA LA DESACTIVACIÓN DEL BIT DE SALIDA.

67
Instrucciones basicas
LA INSTRUCCIÓN CMP COMPARA EL DATO DE UN CANAL (16 BIT) O UNA CONSTANTE, CON EL CONTENIDO DE OTRO CANAL. EN RELACIÓN CON EL RESULTADO DE LA COMPARACIÓN, EXISTEN LOS FLAGS DEL SISTEMA: — GR — EQ — LE LOS PARÁMETROS C1 Y C2 A COMPARAR PUEDEN PERTENECER A DISTINTAS AREAS DE MEMORIA
 O UNA. CONSTANTE, CON EL CONTENIDO DE OTRO CANAL. EN RELACIÓN CON EL RESULTADO DE LA COMPARACIÓN, EXISTEN LOS FLAGS. DEL SISTEMA: — GR. — EQ. — LE. LOS PARÁMETROS C1 Y C2 A COMPARAR PUEDEN PERTENECER A DISTINTAS AREAS DE MEMORIA.")
68
Instrucciones basicas
DADO QUE LOS FLAGS GR, EQ, LE PUEDEN IR ASOCIADOS A VARIAS INSTRUCCIONES Y QUE SE RESETEAN AL FINAL DEL CICLO DE SCAN ES NECESARIO CHEQUEAR EL RESULTADO DE LA COMPARACIÓN EN LA RAMA DE PROGRAMA INMEDIATAMENTE SUCESIVA A LA QUE HA ACTIVADO LA CMP. TRAS LA OPERACIÓN DE COMPARACIÓN SE ACTIVARÁ UNO SOLO DE LOS FLAGS GR, EQ, LE.

69
Instrucciones basicas
EXISTEN INSTRUCCIONES DE COMPARACION INTERCALABLES EN ALGUNA LINEA DE PROGRAMA, POR EJEMPLO = IGUAL QUE < > DISTINTO QUE < MENOR QUE > MAYOR QUE EN EL EJEMPLO, LA SALIDA SE ACTIVARA SOLO SI AL ACTIVAR LA ENTRADA 0.0 SON IGUALES EL CONTENIDO DEL D300 SEA IGUAL AL D500

70
Instrucciones basicas
LA INSTRUCCIÓN MOV REALIZA EL MOVIMIENTO DE UN DATO DE 16 BIT, DESDE UN CANAL A OTRO. EL CONTENIDO DEL CANAL FUENTE SE TRANSFIERE AL CANAL DESTINO D. — S:#, IR, SR, HR, TIM, CNT — D: IR, HR

71
Instrucciones especiales

72
Direccionamiento con punteros
Cuando para un operando se especifica el área de DM, se puede utilizar una dirección indirecta. Para diferenciar el direccionamiento de DM indirecto se coloca un asterisco delante de DM : *DM Cuando se especifica una dirección indirecta de DM, el canal DM designado contendrá la dirección del canal DM que contiene el dato que se utilizará como operando de la instrucción. Cuando se utilice direccionamiento indirecto, la dirección del canal deseado debe estar en BCD y debe especificar un canal comprendido en área de DM.

73
Direccionamiento con punteros
Normalmente la variable especificada por una cierta instrucción es tal que la instrucción opera con el dato especificado en la variable especificada. TIM00 DM0011 #0432 DM0011 EN ESTE CASO SV = 432 El direccionamiento indirecto permite especificar un dato por la dirección de DM donde ése dato está contenido (la dirección es la variable). TIM00 *DM0011 #0432 DM0011 #1547 DM0432 EN ESTE CASO SV = 1547
. TIM00. *DM0011. #0432. DM0011. #1547. DM0432. EN ESTE CASO SV =")
74
Instrucciones SET / RESET
La operacion es similar a la de KEEP, solo que se pueden hacer las operaciones SET y RESET en diferentes lineas de programa.

75
Instruccion interlock
AL EJECUTARSE ESTA FUNCION, QUEDA DESHABILITADA TODA LINEA DE FUNCION HASTA ENCONTRAR UN ILC

76
Instrucciones Especiales
Matemática en BCD Suma en Registros Simples First of all, I explain the background of this development.

77
Instrucciones Especiales
Matemática en BCD Resta en Registros Simples First of all, I explain the background of this development.

78
Instrucciones Especiales
Matemática en BCD Multiplicacion en Registros Simples First of all, I explain the background of this development.

79
Instrucciones Especiales
Matemática en BCD Division en Registros Simples First of all, I explain the background of this development.

80
Instrucciones especiales
Conversion Hexadecimal a BCD La funcion BCD convierte el valor en hexadecimal contenido en el canal fuente a su valor BCD equivalente y lo guarda en el canal destino, sin modificar el original

81
Instrucciones Especiales
Escalado Binario a BCD - SCL Resultado R = By – [(By – Ay)/(Bx – Ax) x (Bx – S)] First of all, I explain the background of this development.
/(Bx – Ax) x (Bx – S)] First of all, I explain the background of this development.")
82
Instrucciones Especiales
Escalado Binario a BCD - SCL A diferencia de la función BCD que convierte un valor Hexadecimal de 4 dígitos a su valor BCD, la función SCALING SCL permite hacer la conversión usando una relación lineal. First of all, I explain the background of this development.

83
Instrucciones basicas
Escalado Binario a BCD - SCL Ejemplo de aplicacion. Utilizaremos el potenciometro incorporado del CP1H, cuya direccion es A642, haciendo un escalado para saber en que porcentaje de su recorrido se encuentra Los parametros de control seran el D0, D1, D2 y D3. El resultado final se cargara en D1000, donde podremos ver el valor en BCD

84
Señales Analógicas Los Autómatas reciben y envían señales analógicas del campo a través de módulos dedicados. Estos módulos pueden ser locales, lo cual es factible en todos los autómatas También pueden ser remotos, por intermedio de redes de E/S como DeviceNet o Compobus/S, y que están disponibles en autómatas de tipo CPM2C, SRM1, C200HS, C200H ALFA, CJ1, CJ1M y CS1. El tratamiento de ambos tipos de disposición, o la combinación de ellos, se realiza de manera transparente para el usuario, ya que tanto entradas como salidas quedan en el mapa de memoria del autómata, sea locales o remotas. First of all, I explain the background of this development.

85
Señales Analógicas Entradas y salidas analogicas en CP1H
En la ventana de configuracion encontraremos las opciones de configuracion de las E/S analogicas que vienen incorporadas.

86
Señales Analógicas

87
Programación secuencial

88
Estructuración de Programas
Programación Lineal y Secuencial Desde el punto de vista de cómo realizar la programación de una máquina se deben distinguir las funciones por tipo: LINEAL o STANDARD, donde la lógica se ejecuta considerando el estado presente de E/S, sin tener en cuenta estados previos de funcionamiento. Casos típicos son los movimientos manuales de posicionamiento, los servicios auxiliares, cintas y transportes, etc.. SECUENCIAL, donde sí se toman en cuenta los estados previos de la máquina. Casos frecuentes se encuentran en máquinas de manejo de material, envasadoras, máquinas herramienta, etc.. First of all, I explain the background of this development.

89
Estructuración de Programas
Programación Secuencial Se debe crear un Diagrama de Flujo, donde se especifican los PASOS y las CONDICIONES DE TRANSICIÓN First of all, I explain the background of this development.

90
Estructuración de Programas
Programación Secuencial Detalles First of all, I explain the background of this development.

91
Estructuración de Programas
Programación Secuencial Ventajas Al crear un diagrama de flujo quedan claras las condiciones de funcionamiento y los estados posibles de la máquina. Las modificaciones futuras son muy rápidas y simples de introducir, ya que se hacen sobre el diagrama existente. Se pueden organizar la secuencia por un lado, y las acciones por el otro. La búsqueda de problemas es muy rápida, pues la secuencia se detendrá en un PASO al no cumplirse las CONDICIONES para pasar al siguiente. Ahí se detecta cual es la condición y se identifica el problema. Agregar un sistema de ALARMAS es simple, ya que se pueden considerar dentro del diagrama de flujo las detecciones de falla de equipos y/o sistemas, además de colocar tiempos esperados de actuación física de la máquina, luego de los cuales se genera una alarma. First of all, I explain the background of this development.

92
Estructuración de Programas
Programación Secuencial First of all, I explain the background of this development.

93
Estructuración de Programas
Programación Secuencial First of all, I explain the background of this development.

94
Estructuración de Programas
Programación Secuencial First of all, I explain the background of this development.

95
Estructuración de Programas
Programación Secuencial Salidas de Control First of all, I explain the background of this development.

96
¿Preguntas?

97
Gracias por su presencia!

Presentaciones similares















 Parte III Excel e Internet Tema 2.>")



