Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Dinámicas de modelos depredador-presa simples con uso de refugio por las presas. Una pequeña revisión y nuevos resultados Eduardo González Olivares y Betsabé González Yañez Grupo de Ecología Matemática Instituto de Matemáticas, Pontificia Universidad Católica de Valparaíso, Chile

2
COMPORTAMIENTOS ANTIDEPREDATORIOS
Las presas usualmente presentan diversos comportamientos para evitar ser depredadas; entre estas conductas se encuentran: El uso de refugio La emisión de sustancias químicas. Los cambios de forma o tamaño (mimetismo) La aparición de púas. La parición o reproducción en ciertos períodos del año. La formación de grupos de defensa. La aparición de defensas inducibles, etc
 La aparición de púas. La parición o reproducción en ciertos períodos del año. La formación de grupos de defensa. La aparición de defensas inducibles, etc.")
3
Mecanismos antidepredatorios:
Fisiológicos: Emisión de sustancias químicas o feromonas, etc Lanzan tinta como defensa, y cuando están en peligro se desplazan mediante la expulsión de un chorro de agua a través de la cavidad respiratoria, se mimetiza con el ambiente, cambiando tanto de forma como de color . Los zorrillos tienen un sistema de defensa que consiste en arrojar su esencia a modo de spray, un olor muy peculiar que es producido por sus glándulas urinarias

4
Adecuación de hábitat: Usos de refugios, en la naturaleza, muchas presas responden a los ataques de los predadores buscando refugios espaciales tales como una cáscara o madriguera

5
Sociales : Formación de grupos de defensa

6
Morfológicos: Patrones de coloración, mimetismo con el ambiente, adaptabilidad de algunas partes del cuerpo, etc. Imitación de códigos: Emisión de sonidos. Hacerse el muerto

7
INTRODUCCION: Los refugios son cualquier espacio físico usado generalmente por una parte de las presas para evitar la depredación y esa fracción la denotaremos por xr. Maynard-Smith (1974) indica que el tamaño poblacional xr puede ser considerada desde dos perspectivas: Que es proporcional al tamaño de la población presente en el instante t > 0, o sea, b) Que es una cantidad fija, esto es , es decir, la cantidad de presas refugiadas depende de la capacidad de escondite que ofrezca el medio ambiente.
 indica que el tamaño poblacional xr puede ser considerada desde dos perspectivas: Que es proporcional al tamaño de la población presente en el instante t > 0, o sea, b) Que es una cantidad fija, esto es , es decir, la cantidad de. presas refugiadas depende de la capacidad de escondite que ofrezca el. medio ambiente.")
8
Nosotros pensamos que también puede ser considerado como una función de la cantidad de depredadores presentes, esto es , o En este trabajo consideraremos que la cantidad de presas en refugio es proporcional a los encuentros entre presas y depredadores, esto es, . En trabajos de dinámica poblacional se ha afirmado comúnmente que el uso de refugio tiene un efecto estabilizador en la interacción. Esta afirmación se puede comprobar usando el modelo de Lotka-Volterra asumiendo que la cantidad de presas en refugio es proporcional a la cantidad total de la población o bien es una cantidad fija.

9
Supuestos biológicos implícitos para todos los modelos
Los cambios en los tamaños poblacionales son debidos a nacimientos y muertes. Los tamaños poblacionales de ambas especies cambian continuamente en el tiempo. No se consideran factores abióticos influyendo en el crecimiento. Las poblaciones están homogéneamente distribuidas en el espacio. El área en que interactúan ambas poblaciones es suficientemente grande para despreciar fenómeno de migración. No se considera división por sexos o por edades. Los parámetros y las variables son de naturaleza determinista.

10
Los modelos tipo Gause son de la forma:
El efecto del refugio puede ser considerado en la respuesta funcional de las presas. La respuesta funcional h (x) de los depredadores se refiere al cambio en la densidad de las presas atacadas por depredador en cada unidad de tiempo cuando la densidad de presas cambia Los modelos tipo Gause son de la forma:
 de los depredadores se refiere al cambio en la densidad de las presas atacadas por depredador en cada unidad de tiempo cuando la densidad de presas cambia. Los modelos tipo Gause son de la forma:")
11
EL MODELO Analizamos un modelo del tipo Gause en el que parte de la población de presas hace uso de refugio para evitar la depredación. El modelo se describe por el siguiente sistema de ecuaciones diferenciales de segundo orden : Definido en

12
Para xr = 0 tenemos el sistema polinomial del tipo Kolmogorov que tiene como puntos de equilibrio a (0,0) y (K,0) y un único punto de equilibrio al interior del primer cuadrante dado por : Este punto es global asintóticamente estable mientras que los otros dos son sillas.

13
Consideraremos con δ > 0 es decir, la cantidad de presas en refugio es proporcional a los encuentros presa-depredador y obtenemos el siguiente sistema bidimensional. El vector

14
Los parámetros tienen los siguientes significados biológicos.
r : es la tasa de crecimiento per capita de las presas. K : es la capacidad de soporte o carga del medio ambiente. q : es la tasa de mortalidad o consumo de los depredadores. p : mide la eficacia con que los depredadores convierten en energía lo consumido para el nacimiento de nuevos depredadores. c : tasa de mortalidad natural en ausencia de presas.

15
Los puntos de equilibrio del sistema son:
donde y xe es solución de una ecuación de tercer grado.

16
RESULTADOS PRINCIPALES
Proposición 1: Usando cambio de variable y reescalando el tiempo mediante el difeomorfismo: tal que El sistema (2) es topológicamente equivalente al sistema :
 es topológicamente equivalente al sistema :")
17
El sistema (3) está definido en:
Los puntos de equilibrio son: donde es solución de la ecuación: Según la regla de signos de Descartes p(u) siempre tiene una raíz positiva, que la llamaremos u1= E < 1
 siempre tiene. una raíz positiva, que la llamaremos u1= E < 1.")
18
b) Las soluciones son acotadas.
Proposición 2 El conjunto es región de invarianza. b) Las soluciones son acotadas. (1)
 Las soluciones son acotadas. (1)")
19
Proposición 3: El polinomio p (u) tiene: a) Tres raíces reales positivas ssi b) Dos raíces reales positivas, una de ellas de multiplicidad dos ssi c) Una única raíz real ssi
 Una única raíz real ssi.")
20
Esta situación se puede mostrar en el siguiente gráfico:

21
Proposición 4: Naturaleza de los puntos de equilibrio sobre los ejes: El punto (0,0) siempre es punto silla. b) El punto (1,0) siempre es punto silla. Proposición 5: Si D = - 3EC – C - E2 + E < 0 , entonces el único punto de equilibrio al interior del primer cuadrante es local asintóticamente estable.
 El punto (1,0) siempre es punto silla. Proposición 5: Si D = - 3EC – C - E2 + E < 0 , entonces el único punto de equilibrio al interior del primer cuadrante es local asintóticamente estable.")
22
Único punto de equilibrio globalmente asintóticamente estable, para los parámetros E = 0.4, C = 0.35, B = 0.2 y N =

23
Proposición 6 Si D = - 3EC - C - E2 + E = 0 , entonces : i ) El punto de equilibrio P1= ( E ,3E+1) es atractor. ii ) El punto P2 = es silla nodo. Para los parámetros C = , E = 0.4, B = 0.2 y N = , los puntos son: P1= (0.4,2.2) nodo atractor y P2= (0.3,1.925) silla-nodo
 El punto P2 = es silla nodo. Para los parámetros C = , E = 0.4, B = 0.2 y N = , los puntos son: P1= (0.4,2.2) nodo atractor y P2= (0.3,1.925) silla-nodo.")
24
iii) En particular si , los tres puntos de equilibrio coinciden siendo éste nodo atractor.
Para los parámetros C = , E = , B = 0.2 y N = , el punto es: P1= (0.3333,2) nodo atractor.
 nodo atractor.")
25
Teorema 7 Supongamos que , entonces existen tres soluciones reales positivas para la ecuación p (u)= 0 valores que pertenecen al intervalo Además a) C < u2 < u3 < 1 b) Se puede tener que u1 < u2 <u3 o u2 < u1 <u3 o u2 < u3 <u1
= 0 valores que pertenecen al intervalo . Además. a) C < u2 < u3 < 1. b) Se puede tener que u1 < u2 <u3 o u2 < u1 <u3 o u2 < u3 <u1.")
26
Teorema 8 Supongamos que La naturaleza de los tres puntos de equilibrio al interior del primer cuadrante es

27
Existencia de tres puntos de equilibrio: Un foco atractor, una silla y un nodo atractor.
Los valores de los parámetros son: C = , N = , E = 0.4, B = 0.2 Los puntos son: P1 = (0.4,11.009) silla, P3 = ( ,11.203) nodo atractor y P2 = ( ,1.0753) foco atractor.
 silla, P3 = ( ,11.203) nodo atractor y P2 = ( ,1.0753) foco atractor.")
28
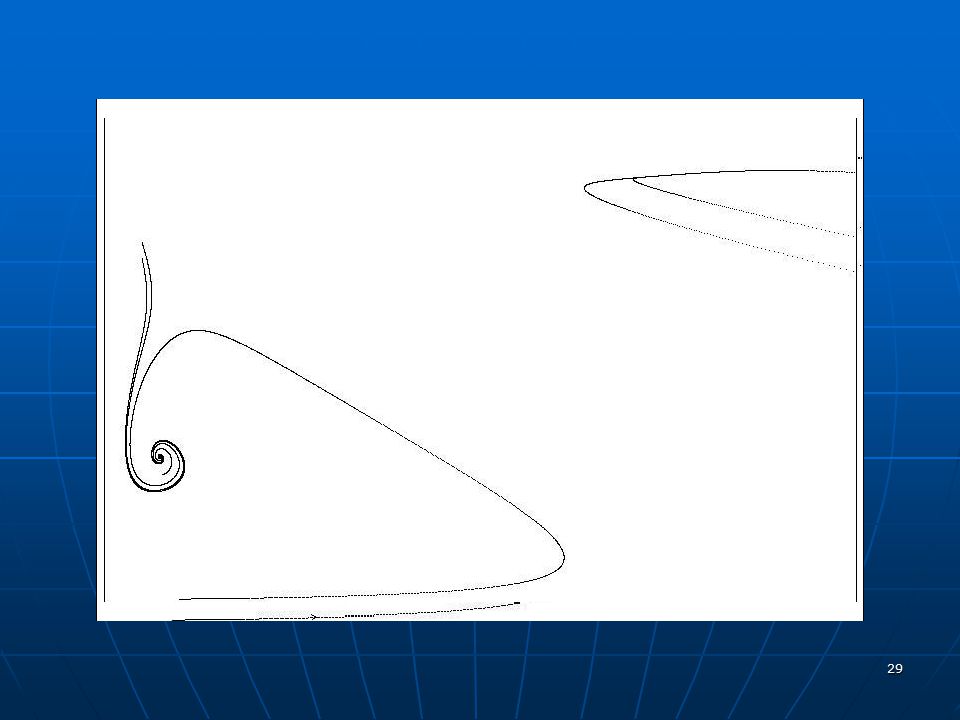
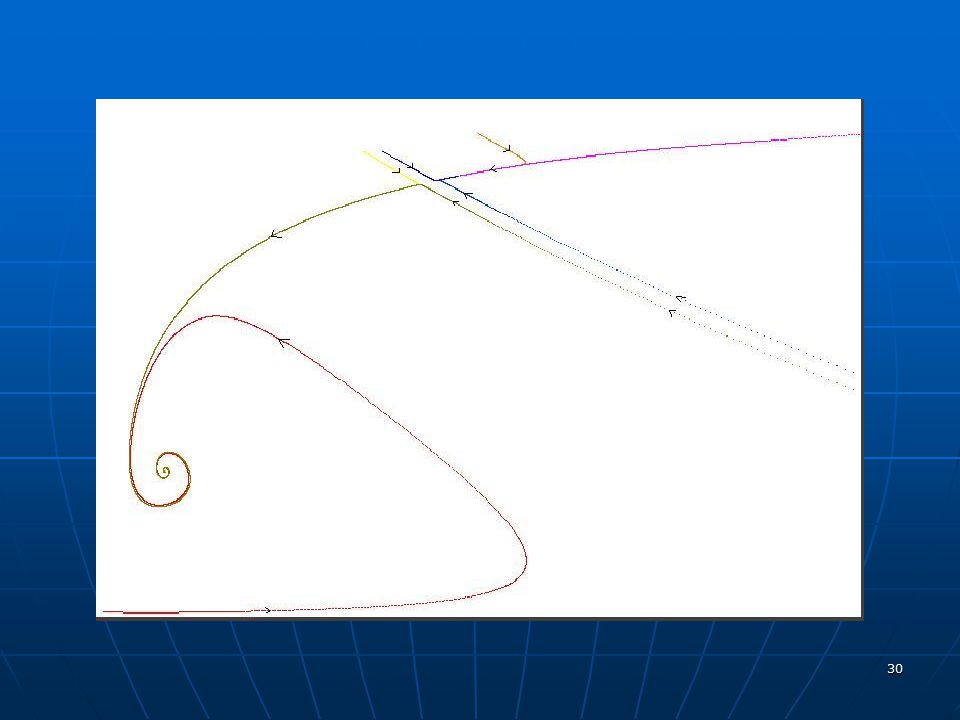
Observación: Existen trayectorias que cruzan hacia la derecha de u =1 lo que, biológicamente significa que para grandes cantidades de depredadores, el refugio de una parte de las presas tiene un impacto negativo en el crecimiento de los depredadores.

32
Gracias por su atención

Presentaciones similares

















 1. Instituto Balseiro, Universidad Nacional de Cuyo,>")


