Descargar la presentación
La descarga está en progreso. Por favor, espere

1
“Identificación y diseño del controlador para un sistema de control de velocidad en un motor de inducción.” Presentado por : Cristhian Alexander Camacho Salvatierra Alex Omar Echeverría Cuadrado.

2
oBJETIVO Principal El objetivo principal del trabajo es desarrollar una identificación del sistema para obtener una representación fiel de la planta. De esta manera cuando se desee probar nuevas alternativas de funcionamiento, no será necesario trabajar sobre la planta real y en su lugar se podrá trabajar sobre un proceso simulado, evitando así posibles deterioros o pérdidas de tiempo de producción.

3
Objetivos Específicos
Usar las técnicas de identificación clásicas para obtener el modelo matemático del proceso. Demostrar la validez y confiabilidad de la identificación, mediante un contraste con los datos reales de la planta. Diseñar un controlador basado en el modelo identificado, que permita lograr el desempeño requerido en el dominio del tiempo.

4
Introducción El presente trabajo ofrece la posibilidad de comprender mejor en qué consiste la identificación de sistemas, dicho sistema para nuestro caso se refiere al control de velocidad de un motor de inducción trifásico. Tendremos en cuenta los rangos de seguridad del motor, es decir no superar su corriente nominal, ya que nuestra planta tiene un variador de velocidad, restringiremos el rango de velocidades en el cual se desarrolla un control voltaje - frecuencia constante, a carga constante. Para medir la velocidad, es necesario obtener los datos desde la planta, por lo que vamos a emplear LabVIEW, siendo un fuerte programa para la adquisición, procesamiento y generación de datos. Para usar herramientas estadísticas de análisis y modelación del proceso, emplearemos Matlab.

5
planta Motor de Inducción 3Ф Carga Terco MV1045 DAQ-NI-USB6009
Variador de Frecuencias Circuitos Electrónicos

6
DiagramA DE cONEXIONES Diagrama de Control del Sistema
Diagrama de Fuerza del Sistema

7
Implementación de medidor de velocidad (Tacómetro)
")
8
Implementación de medidor de velocidad (Tacómetro)
AI0 AO0

9
Adquisición y generación de datos

10
Programación en Labview

11
proceso Validación del Modelo Fin Conocimientos Previos
Experimentación y Obtención de los datos Análisis de los datos Existe Modelo? Elección en la Estructura Obtención de los Parámetros del modelo Validación del Modelo ¿Es Valido? Fin

12
Respuesta al Escalón Tp= 1,38 s. Ts=1,7s 4τ=Ts 4τ=1,7

13
Frecuencia de muestreo máximo

14
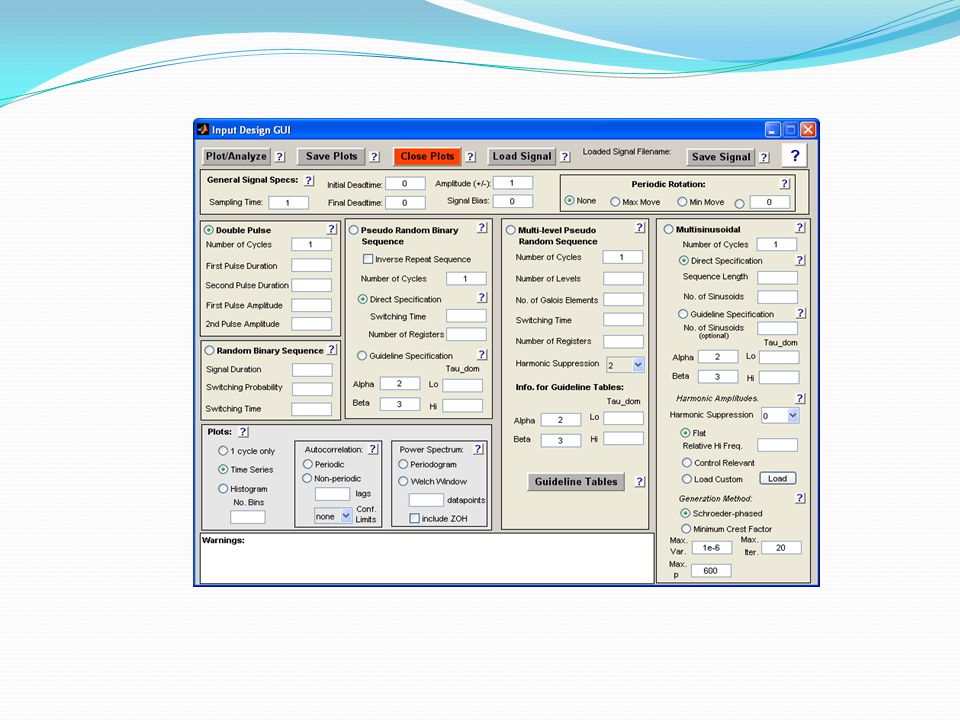
SeñaL de Entrada Señal PRBS PRBS 4 Tiempo de Muestreo 0,4 Amplitud 0,5
Número de Registros 6 Tiempo de Conmutación 1,6

15
Análisis De No Paramétrico [Matriz]=CRA (Z, M, NA, PLOT)
![Análisis De No Paramétrico [Matriz]=CRA (Z, M, NA, PLOT)](http://slideplayer.es/slide/4115772/13/images/15/An%C3%A1lisis+De+No+Param%C3%A9trico+%5BMatriz%5D%3DCRA+%28Z%2C+M%2C+NA%2C+PLOT%29.jpg "Análisis De No Paramétrico [Matriz]=CRA (Z, M, NA, PLOT)")
16
Respuesta al Escalón

17
Diagrama de Bloques General de la Estructura de Error de Predicción
ANÁLISIS PARAMÉTRICO Diagrama de Bloques General de la Estructura de Error de Predicción

18
Estructura ARX Estructura ARMAX Estructura BJ Estructura OE Estructura FIR

19
RESPUESTA AL ESCALón Resultados al Escalón.

20
Análisis del mejor modelo paramétrico

21
Función de transferencia

22
Diseño del controlador
Se está diseñando un controlador, que permita que la respuesta de la planta no tenga un sobre nivel porcentual mayor al 4% y un tiempo de estabilización de 0.5 segundos. Diseñamos un controlador utilizando la herramienta Sisotool de MatLab. Donde F es el filtro, C es el controlador, G es la función de transferencia de la planta y H es la realimentación.

23
Trayectoria de las raíces

24
Diagrama de bloques del controlador
Diagrama de Bloques del Proceso de control de un motor de inducción.

25
Modelamiento del sistema de planta real

26
RESULTADOS SIMULADOS Sin controlador y sin filtro
Con controlador y con filtro

27
Respuestas al escalón Sin controlador y sin filtro
Con controlador y con filtro

28
Análisis de resultados

29
conclusiones El análisis de correlación, siendo un método de identificación no paramétrico, nos dio una alta confiabilidad de trabajo para cada señal de entrada diseñada (ver Figura diapositiva 16) , se comprueba la existencia de una relación fuerte entre la entrada y la salida. Logramos obtener un modelamiento matemático con un ajuste del 83.84% de similitud a la planta real, que describe el comportamiento de la velocidad en un motor de inducción jaula de ardilla con su respectiva potencia de perturbación.
 , se comprueba la existencia de una relación fuerte entre la entrada y la salida. Logramos obtener un modelamiento matemático con un ajuste del 83.84% de similitud a la planta real, que describe el comportamiento de la velocidad en un motor de inducción jaula de ardilla con su respectiva potencia de perturbación.")
30
Realizando la comunicación entre LabVIEW y el variador de frecuencia logramos darle a la velocidad un patrón diferente a seguir, patrones que no son posibles configurarlos desde el variador; el cual lo usamos en nuestro caso, como parte de potencia y de control de fallas. Logramos diseñar el controlador que cumpla con las especificaciones dadas en los criterios para el diseño del controlador con un Tiempo de Estabilización de segundos y un sobre nivel porcentual del 4%. No fue implementado en la planta real por el análisis dado en el capítulo 5.7.

31
Muchas gracias

Presentaciones similares