Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Robot Seguidor de Lineas
Un carro seguidor de línea lo podríamos definir como la unión de varias tecnologías como lo son mecánica, sensores y electrónica, con la correcta implementación de cada una podemos obtener resultados sorprendentes...

2
Mecanica Seguidores de Líneas

3
Chasis El chasis del carro seguidor de línea es la estructura destinada a brindarnos la movilidad, para su construcción se debe elegir un material resistente (acrílico, madera, lámina metálica, etc.) que soporte el peso de la batería, el sistema de control, los motores y los sensores. El diseño del chasis determina el ancho, largo y alto del carro.
 que soporte el peso de la batería, el sistema de control, los motores y los sensores. El diseño del chasis determina el ancho, largo y alto del carro.")
4
Motores Los motores muestran la potencia y la velocidad con que se va a mover el carro, se suele utilizar motores con caja reductora que nos garanticen un buen torque, para el carro se necesitan dos motorreductores.

5
Rueda Loca La dirección del carro en la curvas y en las rectas se encuentra guiada por una rueda loca se coloca en la parte trasera del chasis.

6
Llantas Las llantas deben ser preferiblemente de caucho, garantizando buena adherencia a la pista.

7
Bateria Al momento de escoger la batería es necesario saber a que voltaje y a que amperaje se va a trabajar, los elementos que consumen mayor amperaje en el carro son los sensores y los motores; con a mayor voltaje obtenemos mayor velocidad para los motores.

8
Teniendo estos componentes ahora hay que dar rienda suelta a la imaginación para diseñar una estructura resistente, llamativa y liviana con las cargas bien distribuidas.

9
Sensores Seguidores de líneas

10
Sensor Infrarrojo El sensor con detector de tonos se construirá de forma auto réflex, no quiere decir que no funcione en barrera y réflex, para más detalle de las diferencias formas de censado ver sensor infrarrojo El corazón de nuestro circuito será el LM567 veamos las cuatro etapas que hacen al sensor inmune a interferencias:

11
Circuito LM567 El circuito integrado LM567 es conocido como un detector de tonos, la forma más sencilla de de entenderlo es generar una frecuencia central, mediante un condensador se ajusta el ancho de banda, luego se compara la frecuencia central con el rango del ancho de banda recibido y así se genera una señal de salida 1 ó 0. Por ejemplo (para entender un poco mejor el ancho de banda): Frecuencia Central: 100Hz Ancho de banda: 96Hz a 104Hz
: Frecuencia Central: 100Hz. Ancho de banda: 96Hz a 104Hz.")
12
Transistor 2N3904 Base: Se encuentra precedida por una resistencia de 1KΩ a 1/2W recomendada por el fabricante para que llegue la corriente adecuada a la base y esta pueda ser excitada. Emisor: Se conecta a 0V Colector: Se encuentra precedido por un LED INDICADOR con su respectiva resistencia y está conectada a 5V. En el momento que a la base llega corriente esta conmuta y hace unión entre el colector y la base haciendo que el LED INDICADOR encienda y se obtenga un voltaje en la señal de salida (3,8V).
.")
13
Modulacion Mediante los pines 5 y 6 del circuito LM567 se puede establecer la frecuencia central a generar, con la resistencia (R1) y el condensador (C1) y aplicando la siguiente formula se obtiene:
 y el condensador (C1) y aplicando la siguiente formula se obtiene:")
14
El LM567 trabaja con VCO (oscilador controlado por voltaje), así que con diversidad de R1 y C1 se puede obtener gran variedad de frecuencias. Forma adecuada de conectar tanto R1 como C1:

15
Emision Junto con la R1 y el C1 se obtiene una determinada frecuencia que se aplica a la R2 utilizada por recomendación del fabricante para la base de transistor, una R3 limita la corriente de entrada al D1 IR (infrarrojo) y esté conectado al colector listo para trabajar al ser saturado según la frecuencia central establecida Es importante recordar que entre menor sea la R3 mayor corriente recibirá el D1 IR logrando una mayor distancia; a altas frecuencias puede ser que este tipo de transistor no funcione adecuadamente debido a la frecuencia de saturación.
 y esté conectado al colector listo para trabajar al ser saturado según la frecuencia central establecida. Es importante recordar que entre menor sea la R3 mayor corriente recibirá el D1 IR logrando una mayor distancia; a altas frecuencias puede ser que este tipo de transistor no funcione adecuadamente debido a la frecuencia de saturación.")
16
Recepcion La R4 se coloca para limitar la corriente de entrada, el D2 que es el receptor de la señal infrarroja se coloca inverso, la R5 se coloca a la base del Q1, donde se recibe la frecuencia emitida, la etapa compuesta por la R6 y Q2 sirve como inversor, la señal del colector va al C2 y luego al pin3 donde se recibe la señal.

17
Acondicionamiento de Señal
Para la realización del carro seguidor de línea necesitamos de cuatro sensores: - 2 sensores, fieles a la línea negra - 2 sensores, el carro se detiene en el cuadro blanco

18
La apariencia del diseño del circuito impreso

19
Tamaño en la apariencia 3D, 3cm x 3cm

20
Electronica Seguidores de lineas

21
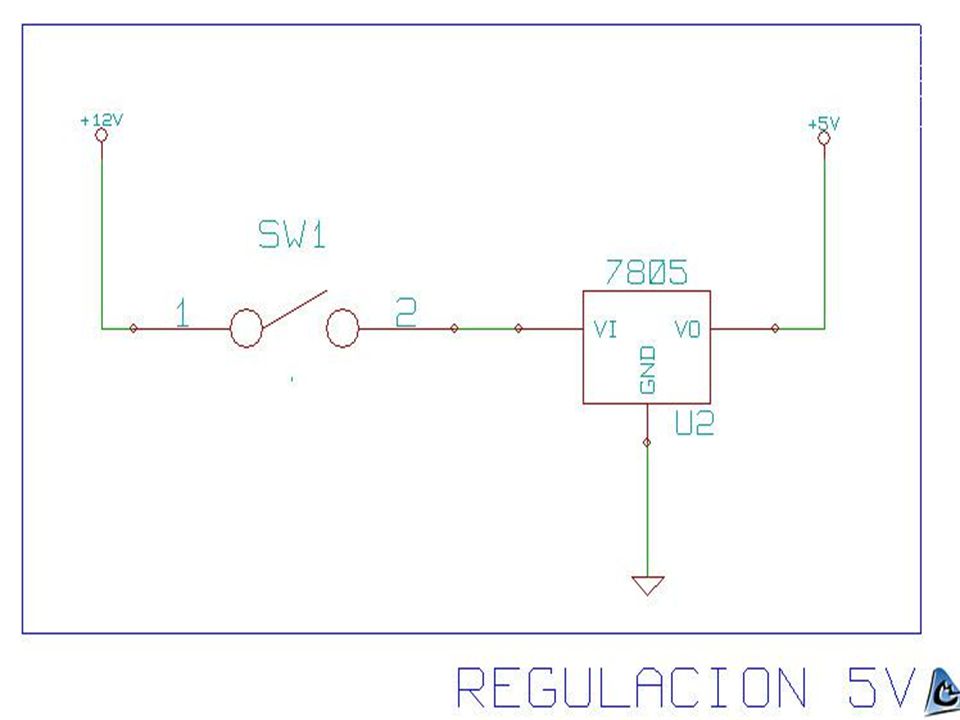
Control de Voltaje Si se trabaja con una batería de 12V ó superior a 5V es necesario utilizar reguladores de voltaje. Los sensores y circuitos integrados que controlan el carro consumen 5V y como se tiene una batería superior a 5V se utiliza un regulador de voltaje puede ser un 7805 con su respectivo disipador. Por el pin 1 entra el voltaje de la batería, el pin 2 va a 0V de la batería y por le pin3 obtenemos 5V.

22
Reversion de Señal La finalidad de este proyecto es la de un carro seguidor de línea negra en fondo blanco si evaluamos la tabla que nos entrega los sensores, estos censan cuando están en color blanco, la mayoría de la pista es de color blanco, sería mejor acondicionar la señal para que los sensores censen en color negro para esto debemos invertir la señal de los sensores con una compuerta veamos: Utilizamos el integrado que además de ser inversora es un disparador Smith Trigger que mediante la entrada de un voltaje entre el rango de 0V a 5V este nos convierte esta señal en una señal digital pura.

23
PARAR EN CUADRO NEGRO DE 120mm x 120mm
Para esto necesitamos la señal de salida de los cuatro sensores sin invertir sus salidas de señal, vamos a utilizar una tabla de verdad y mapas de karnaugh para hallar el circuito lógico: El carro debe parar en el cuadro negro cuando los cuatro sensores estén en estado No censa (0 lógico) y con esto los motores deben estar con 0V
 y con esto los motores deben estar con 0V.")
24
MI =ID + II + CI + CD Nota: La ecuación que se utiliza para el motor izquierdo (MI) es la misma que se utiliza para el motor derecho (MD
 es la misma que se utiliza para el motor derecho (MD.")
25
Control de Motores Veamos lo siguiente teniendo en cuenta:
- 0 No censa línea negra - 1 Censa línea negra - SR Sentido manecillas del reloj - IR Inverso sentido manecillas del reloj Sensor de línea negra Motor Dirección Centro Izquierda CI Derecha CD Izquierdo MI Derecho MD Carro IR Reversa 1 SR Curva derecha Curva izquierda Adelante

26
Para esto vamos a utilizar el driver para motores L293B que maneja señales de control para nuestro caso son los sensores y a partir de esta se puede controlar hasta 2 motores y su sentido de giro a través de un puente H. Este integrado en su pin1 y pin9 maneja el Enable (habilitador), si es un 1 lógico habilita el canal para que el motor gire pero si es un 0 lógico inhabilita el canal evitando que el motor gire.
, si es un 1 lógico habilita el canal para que el motor gire pero si es un 0 lógico inhabilita el canal evitando que el motor gire.")
31
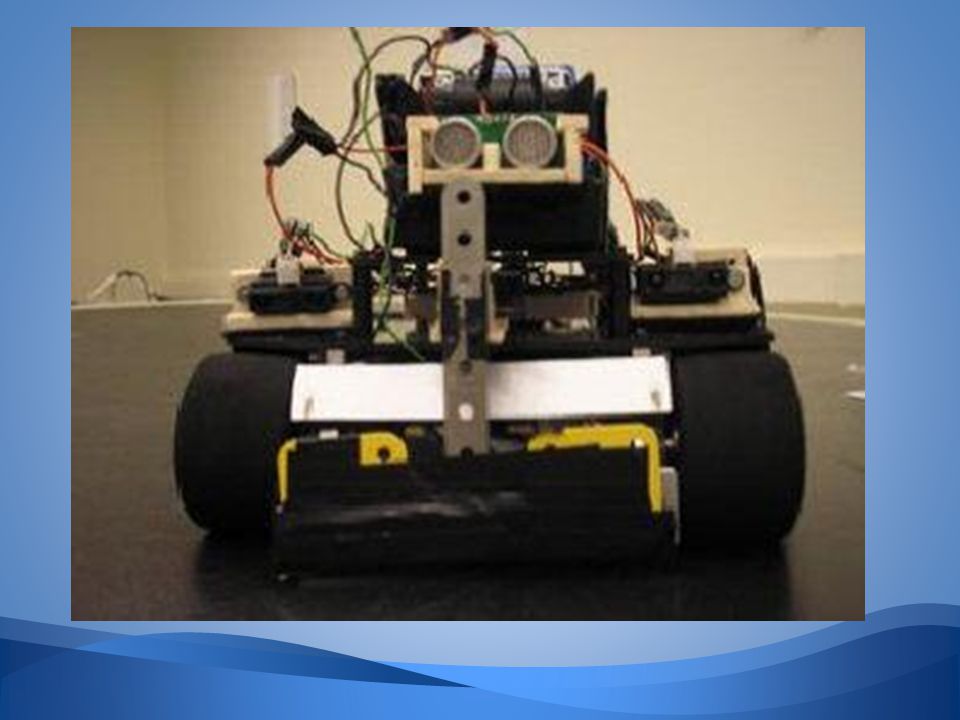
Robots Sumo • El robot puede medir hasta 20cm x 20 cm sin restricciones de altura. •El peso del robot no debe exceder los 3 kg. En el caso que el robot sea controlado remotamente, la unidad de control remoto no se toma en cuenta dentro del peso. •El robot puede ser autónomo o controlado remotamente por una computadora. •El robot no debe tener partes que puedan dañar al Dohyo o al otro robot. El robot no debe emitir líquidos, polvos o gases. • Tampoco debe poder arrojar proyectiles ni contener partes que lo fijen al suelo del Dohyo.

32
Sensores En el mercado están disponibles sensores como los usados en el sonar o para detectar objetos, los siguientes son algunos de estos.

33
Sensor de distancia tipo Sonar
Produce una salida analógica discreta dependiendo del tiempo en que se demora el pulso de sonido en regresar al sensor, el cual puede ser utilizado para calcular la distancia aproximada

34
Sensor de distancia tipo Infrarrojo
es un sensor medidor de distancias por infrarrojos que indica mediante una salida analógica la distancia medida. La tensión de salida varia de forma no lineal cuando se detecta un objeto en una distancia entre 10 y 80 cm. La salida esta disponible de forma continua y su valor es actualizado cada 32 ms. Normalmente se conecta esta salida a la entrada de un convertidor analógico digital el cual convierte la distancia en un numero que puede ser usado por el microprocesador. La salida también puede ser usada directamente en un circuito analógico. Hay que tener en cuenta que la salida no es lineal. El sensor utiliza solo una línea de salida para comunicarse con el procesador principal.

35
Mecanica Robots Sumo

36
Motores Nuestro Sumo puede contar con 2, 4 o hasta 8 motores, en esta ocasión ocuparemos 2 motorreductores para una tracción 2x2 con oruga.

37
Electronica y Software
Robots Sumo

38
Puente H L298. La tabla 1 muestra los
valores correspondientes para el correcto funcionamiento del integrado. El modo usado fue cuando Ven = H para las simulaciones. Pero el verdadero valor de Ven estará oscilando según la salida del PWM, ya que para Ven = L, se detiene el motor.

39
MD22 Este driver controla 2 motores y permite 5 amperios por canal. Necesita +5v y Gnd, así como 2 salidas , una para controlar cada motor. Este driver lo que hace es que cuando le mandas una orden la repite constantemente hasta que le mandes otra. En los motores, entre el polo positivo y el negativo puse un supresor de ruido que sirve para eliminar interferencias entre los motores y el driver.

40
COMPUERTA NOT (74LS04) Esta compuerta lógica viene con seis entradas NOT como se observa en la figura 7. El voltaje de alimentación típico para este integrado es de 5V. El voltaje de entrada para que se considere en alto debe ser mayor o igual a 2V y menor o igual al voltaje de alimentación, con esta consideración la compuerta entregara a la salida un valor de 0V. En cambio, si el voltaje de entrada es menor a 2V entonces la compuerta tomara el voltaje de entrada como en bajo y su salida entregara 5V.

41
REGULADOR DE VOLTAJE 7805 Entrega un voltaje de salida (Vout) de 5V. El voltaje de entrada (Vin) puede ser de hasta 12 volts. Este circuito fue usado para alimentar básicamente a todos los otros circuitos integrados. La figura 8 muestra la configuración para la aplicación del circuito estándar.

43
Propuesta del diagrama No. 1

44
Los voltajes entregados por los sensores deben ser acondicionados para que el ATMEGA8 pueda
procesarlos, estos valores son: para la región negra los sensores entregan un voltaje de salida arriba de 4V aproximadamente, para la región blanca los sensores dan 1.3V aproximadamente. Para este acondicionamiento se usa un comparador de voltaje (figura 10) que reciba los voltajes de cada uno de los sensores IR. Así, a la salida del comparador tenemos 0V para 1.3V y 5V para 4V.
 que reciba los voltajes de cada uno. de los sensores IR. Así, a la salida del comparador tenemos 0V para 1.3V y 5V para 4V.")
45
La compuerta NOT es usada para que al ATMEGA8 trabaje correctamente, ya que este solo acepta niveles de voltaje de 0V o 5V (Off/On respectivamente). Esta compuerta entrega a su salida 0V cuando en su entrada hay un voltaje menor o igual a 1.5V, en otro caso entrega 5V. El principal problema con este tipo de comparador es que solo se puede detectar un solo rango de luminosidad, es decir que si la intensidad de luz aumenta, los límites del voltaje inferior 1.3V (salida de los sensores) suben hasta 2 V, en caso contrario si la luminosidad disminuye el límite inferior se mueve hasta 1V aproximadamente o menos, y con esto hay que modificar los valores del potenciómetro o resistencia que se esté usando en el circuito comparador de voltaje. Esto hace tedioso el trabajar con ese circuito y lo deja propenso a errores, ya que podría haber mucha luz y el sensor siempre estaría arrojando un valor de voltaje sobre la línea blanca de aproximadamente 3 V (tabla 4) así la compuerta NOT siempre estaría entregando 5V a la salida. Por lo tanto no se podría detectar el cambio de negro a blanco (y viceversa).
 suben hasta 2 V, en caso contrario si la luminosidad disminuye el límite inferior se mueve hasta 1V aproximadamente o menos, y con esto hay que modificar los valores del potenciómetro o resistencia que se esté usando en el circuito comparador de voltaje. Esto hace tedioso el trabajar con ese circuito y lo deja propenso a errores, ya que podría haber mucha luz y el sensor siempre estaría arrojando un valor de voltaje sobre la línea blanca de aproximadamente 3 V (tabla 4) así la compuerta NOT siempre estaría entregando 5V a la salida. Por lo tanto no se podría detectar el cambio de negro a blanco (y. viceversa).")
46
Propuesta No. 2

47
Para esta segunda versión del robot, fue necesario llevar a cabo los siguientes objetivos:
• Caracterización de los sensores IR. • Generación de los rangos de operación para abarcar los diferentes grados de intensidad luminosa. • Implementación del código para el uso de los ADC´s. La idea de usar los canales ADC’s del ATMEGA8 es tener una exactitud mayor en la medición sobre en qué región están los sensores (blanco o negro) . Para esto se considero que el ADC a usar del ATMEGA8 es de 8 bits con lo que la resolución del micro seria de 5V/256 (5V es el voltaje de alimentación de los sensores IR), esto nos da 256 niveles para representar las intensidades de luz que reciben los sensores IR. Con esto el límite superior para indicar la región negra es: 5V equivale a 255, la relación para representar cualquier nivel de voltaje en el rango de 0V a 5V queda de la siguiente forma: X = (Vmedido*255)/5. Donde X es el valor que representa un nivel de voltaje
 . Para esto se considero que el ADC a usar del ATMEGA8 es de 8 bits con lo que la resolución del micro seria de 5V/256 (5V es el voltaje de alimentación de los sensores IR), esto nos da 256 niveles para representar las intensidades de luz que reciben los sensores IR. Con esto el límite superior para indicar la región negra es: 5V equivale. a 255, la relación para representar cualquier nivel de voltaje en el rango de 0V a 5V queda de la siguiente forma: X = (Vmedido*255)/5. Donde X es el valor que representa un nivel de voltaje.")
51
Robot Cuadrupedo

52
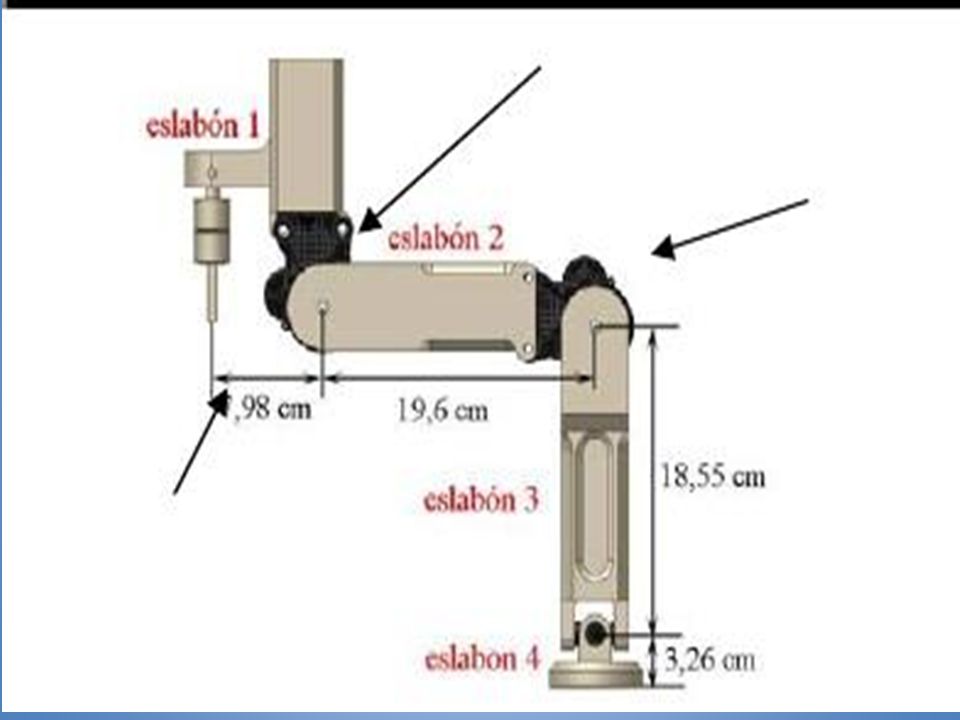
Diseño mecanico Cada pata esta conformada por cuatro eslabones, tres de los cuales se encuentran unidos através de articulaciones rotacionales operadas por el movimiento del eje de un motor,dando un total de 12 grados de libertad a todo els istema. El último eslabón está unido asu predecesor por medio de una articulación universal no actuada que proporciona dos grados delibertad más al extremo final de la pata. Una plataforma cuadrada permite la instalación delas cuatro patas y de los dispositivos electrónicosrequeridos para el control, constituyéndose en la baseestructural del cuerpo del robot. Las patas estándispuestas en el cuerpo de forma simétrica en cada esquina de manera que el centro de gravedad seencuentre en el eje central del cuerpo y que los esfuerzos realizados por cada pata se distribuyan uniformemente. Se ha diseñado el sistema para optimizar elconsumo energético, mediante el uso de motores conmecanismos autobloqueantes, lo que permite que noexista consumo de energía cuando el robot seencuentra detenido.

55
Actuadores Debido a los altos torques generados en las articulaciones, se buscó la implementación de actuadores que cumplan con las especificaciones de fuerza determinados en el análisis dinámico y que posean un sistema de autobloqueo, desviando el esfuerzo necesario para mantener la estabilidad estática sobre el sistema mecánico y no sobre el actuador eléctrico. Estas condiciones se han encontrado en los motores marca Valeo, modelo DC

58
Activacion en serie En la activación en serie, cada servomotor
recibe la señal PWM en cascada, y por lo tanto requiere que termine de ejecutarse la secuencia del servomotor 1 para que inicie la del 2, hasta la de n servomotores. La programación en serie de la secuencia de movimiento es programada con la ayuda de un timer en el caso de un microcontrolador

59
Robot Cuadricoptero Un cuadricoptero es un vehículo volador de Cuatro hélices no tripulado.

60
Motores Dos de los motores (opuestos 2 a 2: motores 1-3 (frontal-trasero) y 2-4 (derecha-izquierda) giran en sentido anti horario (1-3), mientras que los dos restantes(2-4) lo harán en sentido horario. De esta manera el momento de inercia producidos por efectos giroscópicos y aerodinámicos resultante en el centro de la estructura se anulará mutuamente y la aeronave no se movera (No guiñará, he aquí la razón por la que un rotor antipar o fenestrón, típico de una aeronave de alas rotatorias, no es necesario)
 y 2-4 (derecha-izquierda) giran en sentido anti horario (1-3), mientras que los dos restantes(2-4) lo harán en sentido horario. De esta manera el momento de inercia producidos por efectos giroscópicos y aerodinámicos resultante en el centro de la estructura se anulará mutuamente y la aeronave no se movera (No guiñará, he aquí la razón por la que un rotor antipar o fenestrón, típico de una aeronave de alas rotatorias, no es necesario)")
Presentaciones similares