Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Teoría de control

2
¿En que consiste la teoria de control? Como su nombre indica controlar un sistema significa mantenerlo en torno a un valor de consigna de forma automatica.

3
Homeostasis: Capacidad de un sistema para mantener sus variables esenciales dentro de unos limites que permitan un funcionamiento aceptable del sistema pese a la existencia de perturbaciones externas. es una característica básica de los organismos vivos.

4
Requisitos para el diseño de un sistema de control Estudio del sistema a controlar. Modelado del sistema. Análisis del modelo y determinacion de sus propiedades. Diseñar el controlador deacuerdo a las especificaciones dadas. Testeo del control.

5
Sistemas lazo abierto Aquellos en los que la variable de salida (variable controlada) no tiene efecto sobre la acción de control (variable de control). Características – No se compara la salida del sistema con el valor deseado de la salida del sistema (referencia). – Para cada entrada de referencia le corresponde una condición de operación fijada. – La exactitud de la salida del sistema depende de la calibración del controlador. – En presencia de perturbaciones estos sistemas de control no cumplen su función adecuadamente.
. – Para cada entrada de referencia le corresponde una condición de operación fijada. – La exactitud de la salida del sistema depende de la calibración del controlador. – En presencia de perturbaciones estos sistemas de control no cumplen su función adecuadamente..")
6
Sistemas lazo cerrado Realimentacion significa que la señal que esta saliendo del sistema la estamos utilizando como elemento en el control del mismo. C S u y e

7
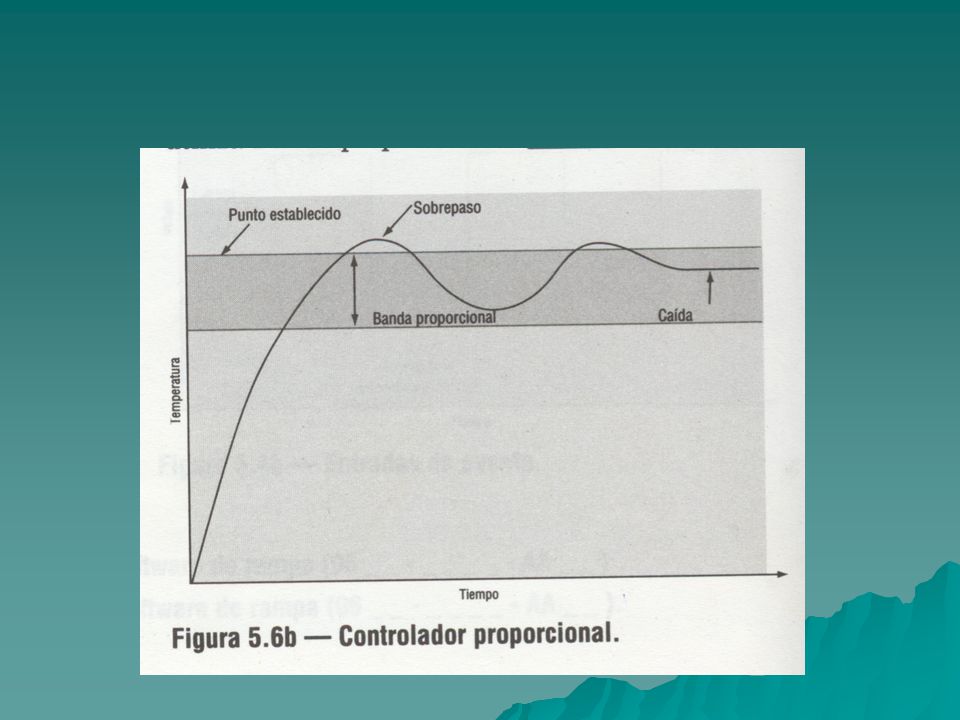
Tipos de feedback control Control proporcional: El error es multiplicado por una constante de proporcionalidad. El control proporcional multiplica el error por una constante, haciendo que el sistema responda rapidamente ante cambios bruscos. Hace al sistema inestable.

9
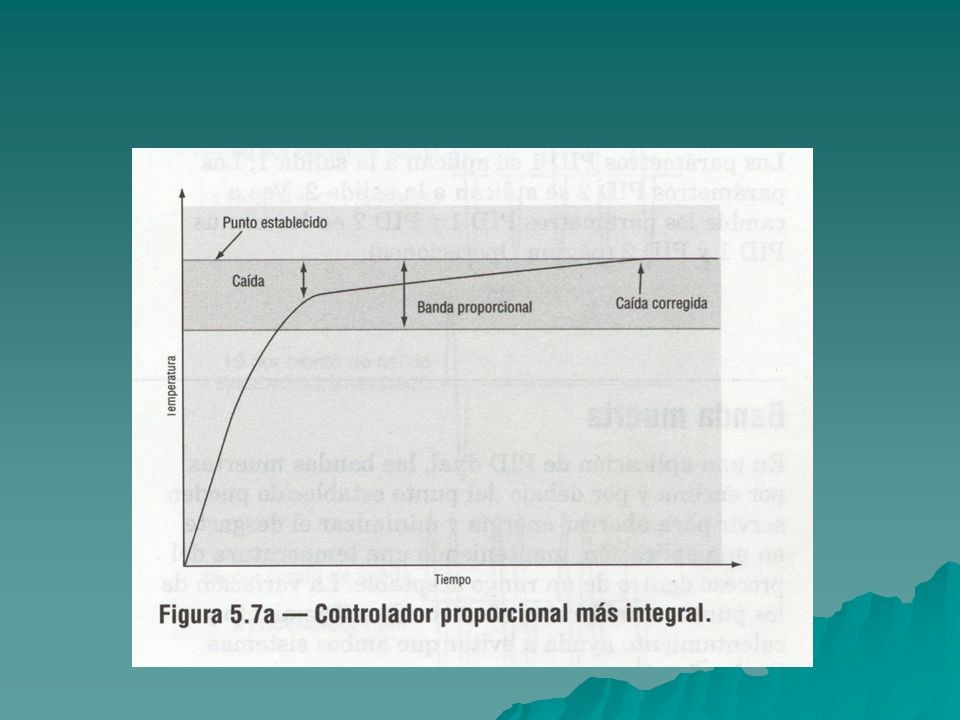
Control Integral: El error es integrado en un intervalo de tiempo antes de introducirse de nuevo en la entrada. Control integral: Permite eliminar errores de ajuste en el estado estacionario, pero realentiza el proceso de ajuste.

11
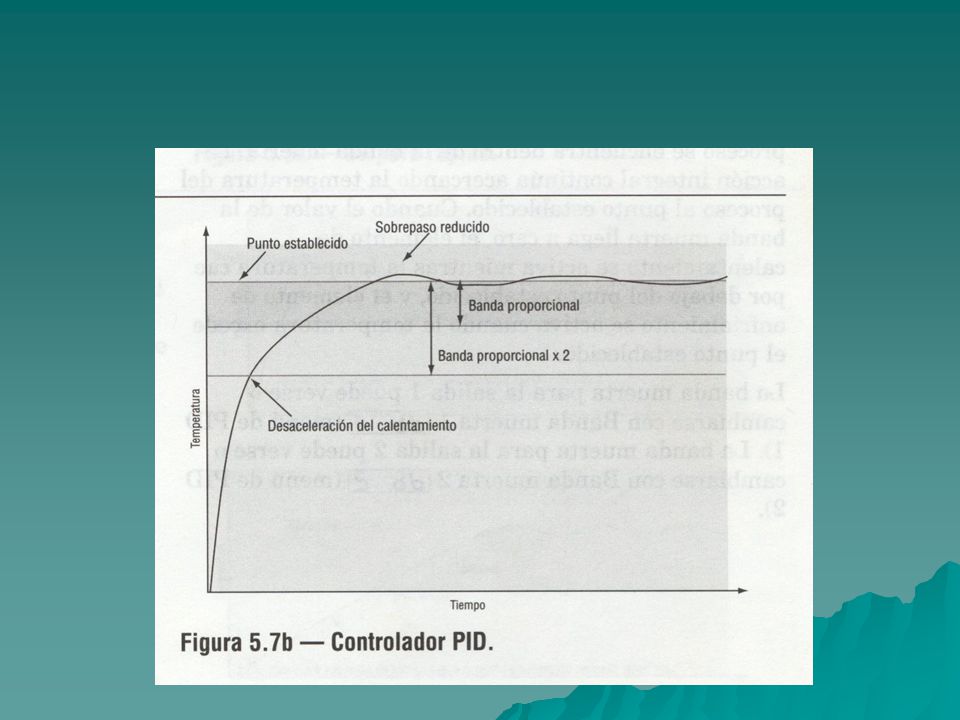
Control diferencial: El error es diferenciado antes de ser introducido en la entrada. Control diferencial: Permite que el sistema se anticipe ante futuros cambios aunque un parámetro de este tipo acelera la convergencia a una consigna respecto a un PI aumenta las oscilaciones en torno a esta.

13
Los sistemas de control estándar utilizan estos tres sistemas acoplados en lo que se conoce como controlador PID. Su funcion de transferencia viene dada por: PID(s)=K(1+1/(T i s)+T d s) Para cada sistema se tratara de conseguir el balance optimo entre los pesos de cada uno de los parametros (estabilidad y velocidad)
=K(1+1/(T i s)+T d s) Para cada sistema se tratara de conseguir el balance optimo entre los pesos de cada uno de los parametros (estabilidad y velocidad).")
14
El parámetro integral tiene una particularidad: El error de un sistema respecto a una consigna tiende a cero cuando el tiempo tiende a infinito sii lo sometemos a un control integral.

Presentaciones similares