Descargar la presentación
La descarga está en progreso. Por favor, espere

1
ENERGÍA EÓLICA TEORÍA Y CONCEPTOS
Dr. Oscar Alfredo Jaramillo Salgado Investigador Titular “A” INSTITUTO DE ENERGÍAS RENOVABLES DE LA UNAM CAPEV 11 de septiembre de 2013 Temixco, Morelos, MÉXICO

3
Aspectos eléctricos de los aerogeneradores
Contenido de la presentación Conceptos básicos de potencia eléctrica Transformadores Máquinas eléctricas Convertidores de potencia Equipo eléctrico auxiliar

4
Electrónica de potencia moderna y sistemas conversores
Muchos tipos de turbinas de viento, tales como sistemas de turbina de viento de velocidad variable, utilizan sistemas electrónicos de potencia como interfaces. Dado que la turbina eólica funciona a la velocidad de rotación variable, la frecuencia eléctrica del generador varía y por lo tanto, debe ser disociada de la frecuencia de la red. Esto puede lograrse mediante un sistema de convertidor de electrónica de potencia. Incluso en un sistema de velocidad fija donde las turbinas de viento se pueden conectar directamente a la red, se utilizan tiristores como sistemas para que su interconexión a la red no sea brusca. La electrónica de potencia ha cambiado rápidamente durante los últimos 30 años y ha aumentado el número de aplicaciones, debido principalmente a los avances de dispositivos semiconductores y la tecnología de microprocesadores. Para ambos casos, un mayor rendimiento recibe constantemente para la misma área de silicio, y al mismo tiempo continuamente está cayendo el precio de los dispositivos. Son tres cuestiones que son de interés en el uso de un sistema electrónica de potencia: fiabilidad, eficiencia y costo. En este momento el costo de dispositivos semiconductores de potencia está disminuyendo a 2-5% cada año para el mismo rendimiento de salida.

5
El único dispositivo de alimentación que ya no está en desarrollo (Fig
El único dispositivo de alimentación que ya no está en desarrollo (Fig. 2.1) es el transistor bipolar basado en el silicio debido a que los dispositivos MOS-gated son preferibles en el sentido de fácil control. La tensión o la actual capacidad de transporte de los componentes también continuamente está aumentando. Además, importantes avances de investigación está ocurriendo para cambiar el material de silicio a carburo de silicio. Esto puede aumentar drásticamente la densidad de potencia de convertidores de potencia, pero transistores de carburo de silicio basado sobre una base comercial, con un precio competitivo, aún tardará algunos años para aparecer en el mercado.
 es el transistor bipolar basado en el silicio debido a que los dispositivos MOS-gated son preferibles en el sentido de fácil control. La tensión o la actual capacidad de transporte de los componentes también continuamente está aumentando. Además, importantes avances de investigación está ocurriendo para cambiar el material de silicio a carburo de silicio. Esto puede aumentar drásticamente la densidad de potencia de convertidores de potencia, pero transistores de carburo de silicio basado sobre una base comercial, con un precio competitivo, aún tardará algunos años para aparecer en el mercado.")
6
Generación eléctrica

7
Convertidores electrónicos de potencia son construidos por dispositivos electrónica de potencia, para manejo, protección y circuitos de control. Un convertidor, dependiendo de la topología y la aplicación, puede permitir ambas direcciones de flujo de potencia y puede funcionar como interfaz entre el generador, la carga y la red eléctrica. Hay dos tipos diferentes de convertidores : grid commutated y self commutated converter systems. El grid commutated converters son principalmente tiristor convertidores, de pulso de 6 o 12 o más. Este tipo de convertidor produce armónicos de entero que en general requiere de filtros de armónicos. Los tiristores no son capaces de controlar la potencia reactiva y consumen energía reactiva inductiva. Self commutated converter systems son convertidores principalmente de ancho de pulso modulado (PWM), donde IGBTs (Insulated Gate Bipolar Transistor) son ampliamente utiulizados. Este tipo de convertidor puede controlar tanto la potencia activa como la potencia reactiva. Eso significa que la demanda de potencia reactiva puede ser entregada por un PWM-converter. La conmutación de alta frecuencia de un convertidor PWM puede producir armónicos y inter-armonics. En general estos armónicos están en el rango de algunos kHz. Debido a las frecuencias altas, los armónicos son relativamente fáciles de ser eliminado por filtros de pequeño tamaño.
, donde IGBTs (Insulated Gate Bipolar Transistor) son ampliamente utiulizados. Este tipo de convertidor puede controlar tanto la potencia activa como la potencia reactiva. Eso significa que la demanda de potencia reactiva puede ser entregada por un PWM-converter. La conmutación de alta frecuencia de un convertidor PWM puede producir armónicos y inter-armonics. En general estos armónicos están en el rango de algunos kHz. Debido a las frecuencias altas, los armónicos son relativamente fáciles de ser eliminado por filtros de pequeño tamaño.")
8
La figura 2.2 muestra un convertidor de potencia electrónico típico, se compone de semiconductores tales comoIGBTs.

9
En la figura 2.3 muestra las formas de onda de los diferentes modos de operación.

10
Sistema Eléctrico El sistema eléctrico de un aerogenerador incluye todos los componentes para convertir energía mecánica en energía eléctrica así como los elementos auxiliares eléctricos y todo el sistema de control. Junto al tren mecánico, el sistema eléctrico, por tanto, constituye el segundo subsistema esencial en una turbina de viento. En una turbina de viento, el convertidor de energía mecánica a eléctrica, es el generador, como en una planta de energía convencional, es el punto focal para todos los componentes anteriores en la cadena funcional (figura 9.1). Sus propiedades características son las más importantes para una turbina de viento.
. Sus propiedades características son las más importantes para una turbina de viento.")
11
En principio, una turbina de viento para la generación de energía eléctrica puede ser equipada con cualquier tipo de generador. Para que la demanda de corriente eléctrica de la red sea compatible se pueden utilizar inversores, incluso si es un generador de corriente alterna, o de corriente directa. Generadores de corriente directa tienen la ventaja de ser operables a velocidades variables. Generadores de corriente directa de alta potencia no son usados comúnmente hoy en día. Las razones tales como un conmutador de alto mantenimiento y su relativamente alto costo. Turbinas de viento muy pequeñas que sólo se utilizan para recargar baterías son de las pocas aplicaciones que continúan con la generación de corriente directa. Sin embargo, no son aptas para turbinas de viento más grandes. Turbinas de viento actual, por lo tanto, tienen generadores de tres fases AC, o alternadores, similares a los utilizados en plantas de energía convencionales.

12
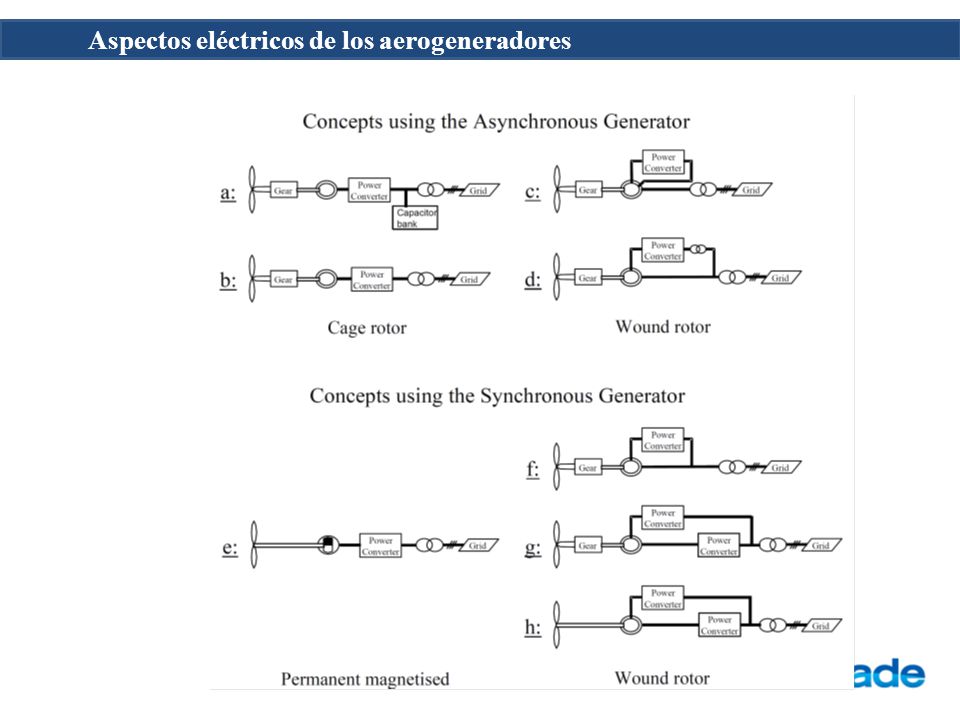
Generador síncrono y asíncrono
Desde el punto de vista de su principio físico de operación, las máquinas de tres fases pueden ser construidas como generadores síncronos o asíncronos (o inducción). Ambos equipos tienen el mismo diseño básico con respecto al devanado de tres fases del estator. La diferencia radica en la manera en que el campo eléctrico es generado en el rotor.
. Ambos equipos tienen el mismo diseño básico con respecto al devanado de tres fases del estator. La diferencia radica en la manera en que el campo eléctrico es generado en el rotor.")
13
Generador síncrono Máquinas sincrónicas eléctricas tienen un rotor que está excitado con corriente directa a través de aros de deslizamiento (figura 9.2). Una tensión alterna se genera en la operación como generador o bien aplicado a energía eléctrica al estator se tiene un funcionamiento como de motor. Las corrientes que fluyen en el estator devanado y tienen frecuencia f y generan el campo llamados de armadura. El devanado del rotor, a través del cual fluye la corriente directa, genera el campo de excitación, que está girando a velocidad síncrona. La velocidad de la máquina síncrona está determinada por la frecuencia del campo giratorio y el número de pares de polos del rotor. La velocidad n del rotor de una máquina sincrónica es:
. Una tensión alterna se genera en la operación como generador o bien aplicado a energía eléctrica al estator se tiene un funcionamiento como de motor. Las corrientes que fluyen en el estator devanado y tienen frecuencia f y generan el campo llamados de armadura. El devanado del rotor, a través del cual fluye la corriente directa, genera el campo de excitación, que está girando a velocidad síncrona. La velocidad de la máquina síncrona está determinada por la frecuencia del campo giratorio y el número de pares de polos del rotor. La velocidad n del rotor de una máquina sincrónica es:")
14
Los generadores sincrónicos se construyen como máquinas de rotor cilíndrico o como Polo-saliente. Generadores de rotor cilíndrico con sólo unos cuantos pares de polos y un rotor con un diámetro pequeño son adecuados para altas velocidades de rotación. En grandes plantas de energía se utilizan como generadores de turbina, impulsados por turbinas de vapor a una velocidad de 1000 a 3000 rpm. Máquinas de Polo-saliente, con un mayor número de pares de Polo y proporcionalmente mayor diámetro, son utilizados en combinación con hidroturbinas en 60 a 750 rpm, (40 pares de Polo son necesarios). En aerogeneradores de eje horizontal, máquinas de polo-saliente se utilizan como una regla (fig. 9.3). Para la frecuencia de la red europea de 50 Hz, se obtiene una velocidad de 1500 revoluciones con dos pares de Polo. En los Estados Unidos con una red de 60 Hz, la velocidad de rotación es revoluciones de 1800.

15
La dirección de rotación y la velocidad del rotor de una máquina síncrona están siempre sincrónicos con la rotación del campo giratorio del estator. Así, no es ningún movimiento relativo (deslizamiento) entre la velocidad del rotor y la velocidad síncrona del campo giratorio del estator. En su lugar, el rotor se gira hacia adelante o hacia atrás, en comparación a su posición de ralentí, por el ángulo de carga llamado (ángulo de desplazamiento de rotor), cuando entra o sale potencia mecánica. El tamaño del ángulo de carga una medida del nivel de carga. Cuando la energía es liberada (se tiene operación de generador) y tiene un valor positivo, y cuando se consume energía tiene un valor negativo (funcionamiento de motor) (fig. 9.4). El ángulo de carga es equivalente al tiempo de entrega o retraso de la tensión de la red en comparación con la tensión del rotor. La característica de par de una máquina sincrónica está representada como una función del ángulo de carga. Un punto de funcionamiento estable sólo es posible en si ϑ = −180◦ to +180◦. El par más alto (par de extracción) se alcanza a ϑ = 90◦. De acuerdo con el estándar VDE (Asociación de alemán ingenieros eléctricos), el punto de funcionamiento nominal debe ser a ϑ = 30◦. Normalmente, el par de extracción tiene dos veces el valor del par nominal. La característica de par puede verse influenciada de manera limitada, variando la tensión de la excitación del rotor.
 se alcanza a ϑ = 90◦. De acuerdo con el estándar VDE (Asociación de alemán ingenieros eléctricos), el punto de funcionamiento nominal debe ser a ϑ = 30◦. Normalmente, el par de extracción tiene dos veces el valor del par nominal. La característica de par puede verse influenciada de manera limitada, variando la tensión de la excitación del rotor.")
16
La eficiencia de máquinas sincrónicas es generalmente mayor que en máquinas de inducción. En la práctica, esta diferencia es relativamente pequeña (1 a 2%), al menos en grandes máquinas. La eficiencia aumenta como aumenta la potencia, como ocurre en otras máquinas. La eficacia en función de la carga es de particular interés con respecto a su uso en turbinas de viento (fig. 9.5).
, al menos en grandes máquinas. La eficiencia aumenta como aumenta la potencia, como ocurre en otras máquinas. La eficacia en función de la carga es de particular interés con respecto a su uso en turbinas de viento (fig. 9.5)..")
17
Junto a la eficiencia, la masa del generador es de importancia para el diseñador, particularmente en aerogeneradores de eje horizontal, donde el generador se encuentra a la cabeza de la torre. La masa del generador está influida considerablemente por el nivel de velocidad a una determinada potencia nominal (fig. 9,6). Cuanto más rápido se gira el generador, es más ligero y, como regla general, es más rentable. Con respecto a su aplicación en una turbina de viento, sin embargo, esto no, implica que un generador de rotación tan rápido como sea posible es la solución más económica. Un generador de velocidad alta hace que la complejidad y el costo de la caja de engranes aumente. La tarea es encontrar la combinación óptima de generador y la relación de transmisión.
. Cuanto más rápido se gira el generador, es más ligero y, como regla general, es más rentable. Con respecto a su aplicación en una turbina de viento, sin embargo, esto no, implica que un generador de rotación tan rápido como sea posible es la solución más económica. Un generador de velocidad alta hace que la complejidad y el costo de la caja de engranes aumente. La tarea es encontrar la combinación óptima de generador y la relación de transmisión..")
18
En la máquina de inducción (o máquina asincrónica), un campo eléctrico es inducido por un movimiento relativo (deslizamiento) entre el rotor y el campo giratorio del estator que produce un voltaje a través del rotor. La interacción del campo magnético asociado del rotor con el campo del estator da como resultado el par actuando sobre el rotor (fig. 9,7).
..")
19
El rotor de un generador de inducción puede ser diseñado como un rotor jaula de ardilla o con anillos de deslizamiento adicionales (fig. 9,8). El rotor de anillo deslizante permite que el rotor pueda ser excitado exteriormente. Cambiando la resistencia eléctrica en el circuito de rotor, puede alcanzar una mayor deslizamiento y con ello una gama amplia de velocidades para el acoplamiento directo a una red eléctrica de frecuencia fija. Si se utiliza un inversor en el circuito de rotor, es posible lograr la operación de velocidad variable en operación paralela de la red.
. El rotor de anillo deslizante permite que el rotor pueda ser excitado exteriormente. Cambiando la resistencia eléctrica en el circuito de rotor, puede alcanzar una mayor deslizamiento y con ello una gama amplia de velocidades para el acoplamiento directo a una red eléctrica de frecuencia fija. Si se utiliza un inversor en el circuito de rotor, es posible lograr la operación de velocidad variable en operación paralela de la red..")
20
Un hecho importante para el funcionamiento de una máquina de inducción en el modo de generador es que el rotor debe ser alimentado con una corriente de magnetización para la generación y el mantenimiento de su campo magnético. Esta demanda de potencia reactiva depende de la potencia activa. En paralelo a la operación de la red, se puede tomar la potencia reactiva de la misma red. En operación de aislamiento o no conectado a la red, se debe proporcionar compensación del factor de potencia de la forma de condensadores. La velocidad síncrona del rotor de un generador de inducción depende de la frecuencia de la red y el número de pares de polo:

21
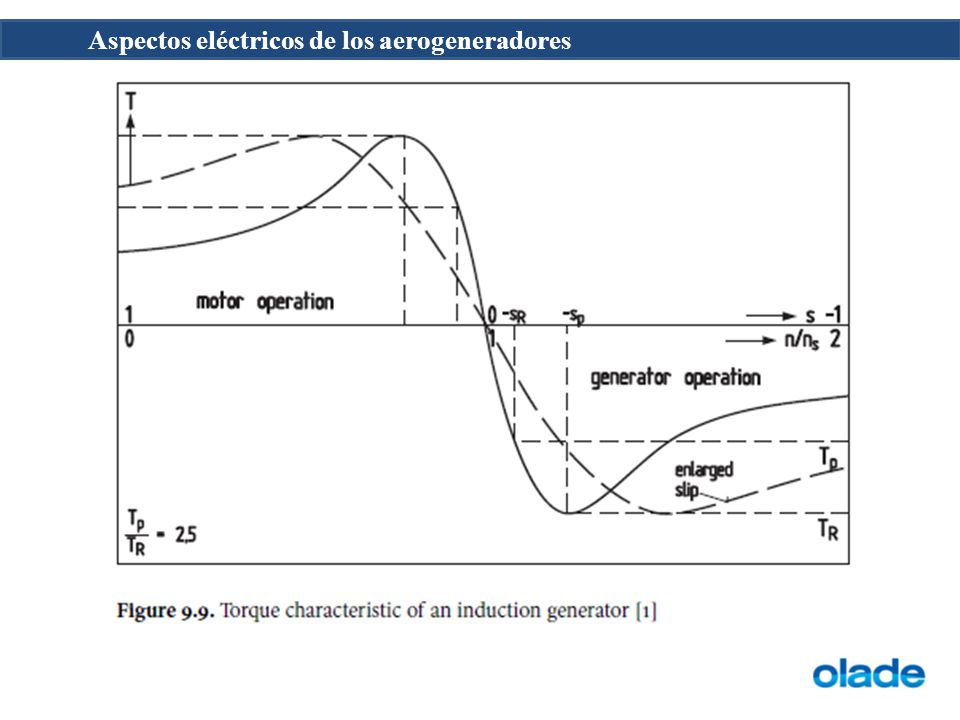
Para dos polos pares, utilizados con frecuencia, se tiene una velocidad síncrona de 1500 rpm y se tiene una frecuencia de f = 50 Hz. Considerando que una red de 60 Hz (como en los Estados Unidos) se requiere una velocidad de generador de 1800 rpm. En el funcionamiento del motor, la velocidad del rotor mecánica es unos pocos por ciento por debajo de este valor y en la operación de generador es de unos pocos por ciento por encima de éste, debido al deslizamiento. El deslizamiento s es de: La velocidad del rotor es de: El par de la máquina asincrónica es una función del deslizamiento. En consecuencia, su par se especifica como la dependencia del deslizamiento (fig. 9,9). Cuando el deslizamiento es s = 0 y s = ∞, la máquina no produce par, o no puede absorber par, respectivamente. Mientras tanto, el par exhibe un máximo. Según VDE 0530, la relación entre el par de extracción MK y par nominal MN debe ser al menos de 1.6 en operación de red.
. Cuando el deslizamiento es s = 0 y s = ∞, la máquina no produce par, o no puede absorber par, respectivamente. Mientras tanto, el par exhibe un máximo. Según VDE 0530, la relación entre el par de extracción MK y par nominal MN debe ser al menos de 1.6 en operación de red.")
23
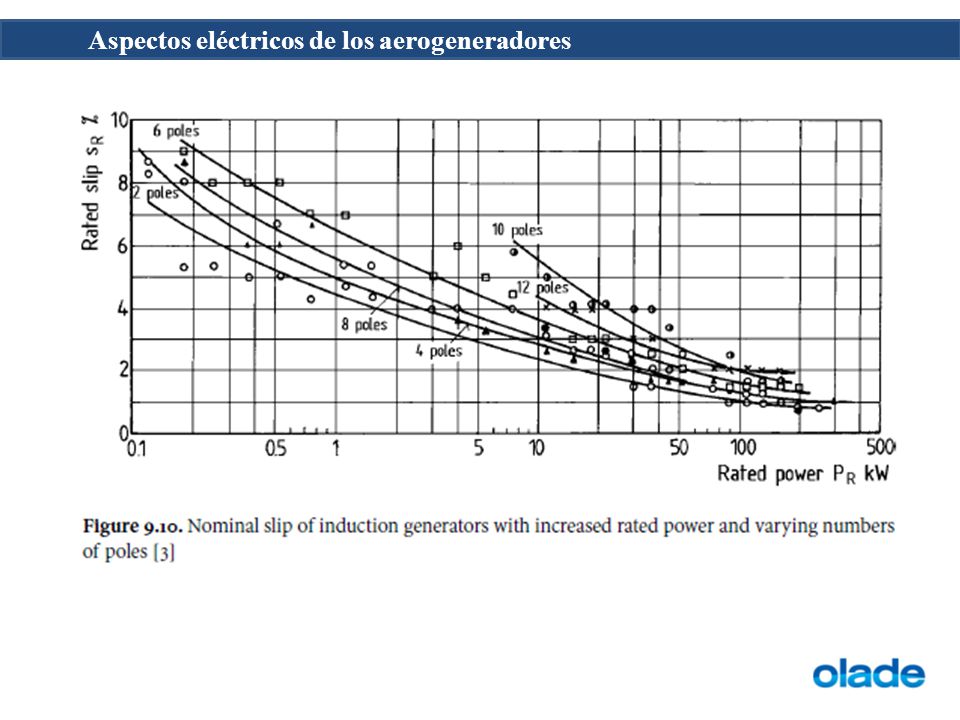
La eficiencia eléctrica de los generadores de inducción es una función del deslizamiento nominal. En turbinas más grandes en el rango de megawatts, el deslizamiento nominal es inferior al 1 % (Fig. 9.10). La eficiencia asociada de aproximadamente 96 a 97% no es mucho menor que en un generador sincrónico comparable. Debido a la absorción de corriente reactiva de la red, el factor de potencia cos ϕ es aproximadamente Pequeños generadores de inducción en el rango de potencia de kilovatios tienen una eficiencia mucho más pobre, con valores proporcionalmente más altos para el deslizamiento nominal. En contraste con una máquina de DC, es muy difícil hacer que cambie su velocidad. Es posible influir en la velocidad dentro de un rango muy estrecho mediante el aumento de la tensión de la terminal. Mediante la conexión de resistencias externas el circuito de rotor, la velocidad puede variar por lo menos en una dirección mediante el aumento de deslizamiento. Esto, sin embargo, requiere un rotor de anillo de deslizamiento. La velocidad de rotación de un rotor de jaula de ardilla se puede cambiar en pasos por medio de la reconexión de polos. Esto requiere que el bobinado del estator deba contar con dos bobinas separadas con diferentes números de pares de polos, una versión que ocasionalmente se utiliza en generadores de inducción para turbinas de viento

25
Criterios de evaluación para generadores eléctricos en aerogeneradores
Una breve análisis de las propiedades fundamentales de los generadores síncronos y de inducción muestra que ambas versiones realmente pueden ser utilizado sin problemas cuando se combinan con una unidad motriz que proporciona un par de conducción constante a una velocidad fija. parte de simples generadores síncronos o de inducción, sistemas de generador de velocidad variable con inversores se utilizan cada vez más en turbinas de viento. Estos sistemas pueden aplicarse sobre la base de cualquier tipo de generador. Antes de examinar los diferentes sistemas eléctricos en mayor profundidad, es útil compilar un "catálogo" de criterios de evaluación que puede utilizarse para evaluar los diferentes sistemas de generador en el contexto de las diferentes condiciones de funcionamiento, por ejemplo, en paralelo con la red a o en aislamiento no conectados. Los criterios de evaluación más importantes que se aplican a los generadores eléctricos o sistemas de generación con respecto a su idoneidad para el uso en aerogeneradores pueden resumirse a través de las siguientes características:

26
Acoplar directamente el generador a la frecuencia fija de red fuerza al generador a presentar una velocidad constante. Por otro lado, en el rotor de la turbina de viento se quiere seguir las variaciones en la velocidad del viento. Entre estos está el tren mecánico de la turbina de viento. Altas cargas dinámicas sobre los componentes mecánicos y severas fluctuaciones en la salida de energía eléctrica son las consecuencias. Sólo se puede lograr la reducción de las cargas dinámicas permitiendo a la velocidad del rotor de viento en un grado de libertad con respecto a la frecuencia de la red, independientemente de cómo esto se realiza, mecánica o electricamente. Una pregunta decisiva es qué cantidad de la variabilidad de la velocidad se requiere para decisivamente reducir el nivel de carga dinámica. Responder a esta pregunta requiere el examen de toda una serie de propiedades del sistema de la turbina de viento, tales como el diseño de rotor aerodinámico, control de ángulo de paso, si está disponible, control del generador, por citar sólo los más importantes.

27
Rango de velocidad Si bien es cierto que una elasticidad de velocidad de 2 a 3% es suficiente para reducir claramente las cargas dinámicas, esto no es suficiente para obtener la variabilidad de la velocidad en el sentido de que una operación orientada al viento requiere un rango de velocidad de aproximadamente 40 a 100% de la velocidad nominal. Un rango de velocidad de esta medida sólo se puede lograr con un generador de velocidad variable y un inversor. Sin embargo, los costos de inversor y la disminución de la eficiencia son factores a considerar. Control Aparte de control de potencia de salida, por ángulo de paso, también es conveniente disponer de un segundo control en la parte eléctrica. Si es posible influir en el par del generador, un modo de velocidad variable de operación del rotor puede implementarse en operación paralela de la red. Los sistemas de velocidad variable controlados generador/inversor suavizan casi completamente la salida de energía eléctrica dentro de los límites de velocidad dada.

28
Simulaciones por ordenador, así como valores empíricos de funcionamiento práctico sugieren que con una velocidad "elasticidad" de sólo 2% al 3%, se puede lograr una mejora duradera. Aparte de la acoplamiento de velocidad, el comportamiento dinámico de la red también está influenciado por la amortiguación de cualquier fluctuación de velocidad del generador sobre la frecuencia de la red. Generadores de inducción tienen características de amortiguación mucho mejores que los generadores sincrónicos. Son, por lo tanto, también dinámicamente menos problemática con respecto a su respuesta oscilatoria, aparte de la velocidad desplazamiento. En el caso donde se utiliza un generador sincrónico, es necesario un dispositivo mecánico adicional en el tren mecánico, por ejemplo un afluido de acoplamiento.

29
Potencia reactiva El requisito de potencia reactiva del sistema generador es un tema central principalmente en operación aislada, evitando el uso de un generador de inducción, por regla general. En operación en paralelo a la red, las características de potencia reactiva no pueden dejarse fuera de consideración, al menos en el caso de las grandes turbinas o de un gran número de turbinas. Los servicios públicos cobran altos pagos por el suministro de potencia reactiva a la red. Con los generadores de inducción se debe compensar el consumo de potencia reactiva mediante la conexión de condensadores. En generadores sincrónicos el factor de potencia "cos ϕ“, pueden ser controlados por la regulación de la tensión en los terminales. En el caso de los sistemas de generador con el inversor, el requisito de potencia reactiva del inversor debe tenerse en cuenta.

30
Perturbaciones de red Incluso la potencia reactiva de la red representa una perturbación indeseable. Además, deben tenerse en cuenta otras interferencias con la red. Entre ellos se encuentran las altas corrientes cuando se está conectado un generador de inducción, o armónicos en la corriente que se alimenta de la red. Armónicos como estos pueden ser generados en pequeña medida por el generador mismo, pero en mucho mayor medida están asociados con el uso de convertidores estáticos. Las señales de alta frecuencia pueden interferir con los sistemas de control de rizo en las red interconectadas. Sin embargo, ellos pueden ser filtradas más fácilmente que las oscilaciones de baja frecuencia. La carga de armónicos en la red fue un criterio de evaluación al menos para algunos de los sistemas de generador de velocidad variable con inversores antiguos. Inversores modernos generan una corriente alterna que está casi completamente libre de armónicos.

31
Synchronisation Sincronizar el generador con la red presenta problemas totalmente diferentes para los dos diseños de generador. Sincronizar un generador sincrónico con la red plantea dificultades considerables para una turbina de viento. En la práctica, sólo se puede hacer mediante un inversor adicional o elasticidad de velocidad y amortiguación en el tren motriz. Generadores de inducción, están conectados a la red por medio de un arreglo de "conexión suave" utilizando tiristores. El objetivo es reducir los llamados “switch-on transient”. Es, sin embargo, mucho más fáciles de conectar generadores de inducción a la red. Desconexión de carga Una desconexión repentina de carga, por ejemplo debido a un fallo de la red o una falla eléctrica, siempre es un momento crítico para una turbina de viento. La pérdida del generador par requiere una acción inmediata de los sistemas de freno de rotor con el fin de evitar que el rotor se “desboque”. Es relativamente fácil de implementar un "freno eléctrico" en un generador sincrónico. Tras la falla de la red, la turbina eólica simplemente debe conmutarse a una resistencia óhmica. En principio, esto también es posible con generadores de inducción, pero entonces la corriente magnetizante del rotor se debe mantener, por ejemplo, por medio de retroalimentación del rotorfeed. Esto es mucho más complicado conseguir y por lo tanto, no se hace en la mayoría de los casos.

32
Eficiencia La diferencia en la eficiencia eléctrica de generadores sincrónicos y generadores de inducción es pequeña, al menos cuando el deslizamiento nominal de los generadores de inducción es pequeño. La discusión de la eficiencia eléctrica, por lo tanto, se centra en la cuestión de cómo la eficacia de los sistemas de velocidad variable generador/inversor está relacionada con el acoplamiento directo de la red de los generadores. Hasta hace poco, sólo era posible construir sistemas de inversor con relativamente poca eficiencia. Electrónica de potencia moderna, sin embargo, ha cambiado esta situación en los últimos diez años. Si la eficiencia global del sistema esta compuesta entonces por la eficiencia aerodinámica del rotor, la eficiencia mecánica del tren motriz que incluye la caja de engranes en su caso, los acoplamientos entre partes mecánicas y eléctricas, la eficiencia de los sistema de control de carga eléctrica y el sistema de orientación del aerogenerador.

35
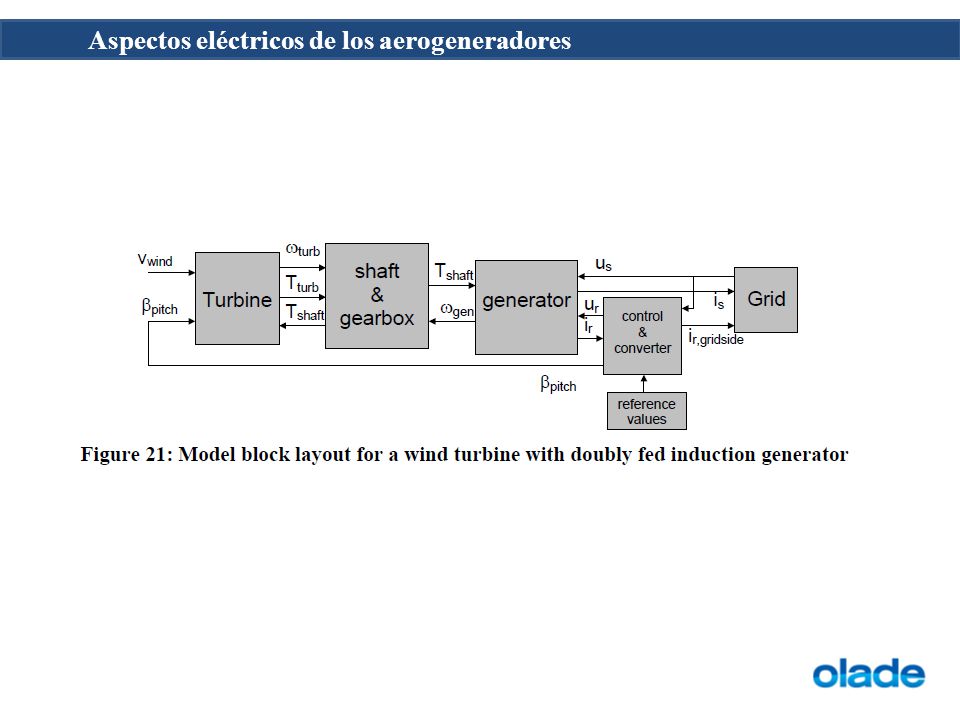
En los últimos años, se ha desarrollado aún más y simplificado el generador de inducción doblemente alimentado. Hoy en día, se ofrece como sistema generador estándar y se utiliza en muchos aerogeneradores grandes (fig. 9.24). I
. I.")
38
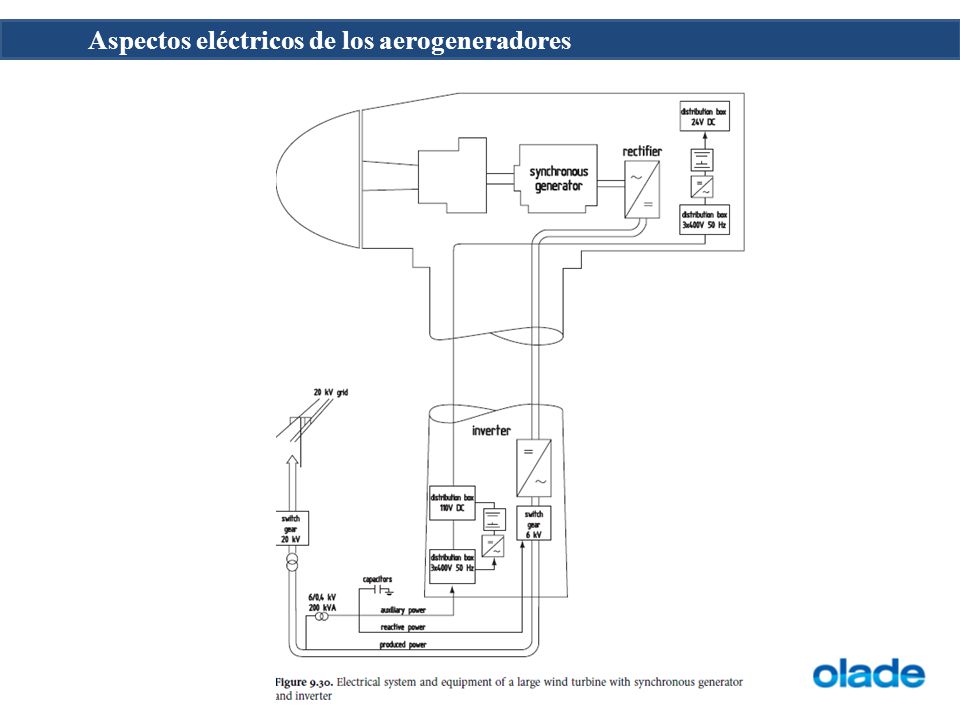
Generador un alternador síncrono de producción en serie con una tensión de salida de 690 Volt El alternador de 4 polos tiene una velocidad nominal de 1500 rpm. Inversor El inversor con enlace de AC-DC-AC también consta de componentes estándar, pero con arreglo especializado. El rectificador está en la góndola y el inversor está en la base de la torre. Control y supervisión del sistema Las funciones de control para el control de potencia, velocidad y los sistemas de control y monitoreo de operación se combinan en una unidad de control centralizada. Además, el sistema de generador/inversor tiene un sistema de control interno que está integrado en el inversor. Fuente de alimentación para el sistema de control Las funciones de instrumentación y control requieren un suministro de voltaje de control de DC (24 V).
.")
39
Distribución de media tensión para los servicios auxiliares
La alimentación eléctrica para las numerosas unidades auxiliares como bombas, actuadores, etc. requiere su propio sistema de suministro a nivel de bajo voltaje, 220/400 V (110/400 V). Transmisión de potencia En la turbinas actuales, cables de torsión flexibles libremente suspendidos se utilizan en la zona superior de la torre. Ángulos de torsión de hasta 500 o 600 grados son utilizados. Sin embargo, por razones de seguridad, un conmutador automático de "untwisting" es necesario cuando se alcanza el límite permisible de ángulo. Transformador La mayoría de los aerogeneradores comerciales de hoy en día tienen su propio transformador eléctrico que cambia el voltaje de salida del generador de (690 V o 6 kV) a nivel de media tensión (20 kV).El transformador se aloja en la base de la torre o en la góndola.
. Transmisión de potencia. En la turbinas actuales, cables de torsión flexibles libremente suspendidos se utilizan en la zona superior de la torre. Ángulos de torsión de hasta 500 o 600 grados son utilizados. Sin embargo, por razones de seguridad, un conmutador automático de untwisting es necesario cuando se alcanza el límite permisible de ángulo. Transformador. La mayoría de los aerogeneradores comerciales de hoy en día tienen su propio transformador eléctrico que cambia el voltaje de salida del generador de (690 V o 6 kV) a nivel de media tensión (20 kV).El transformador se aloja en la base de la torre o en la góndola.")
40
Compensación de potencia reactiva
En turbinas de viento con generadores de inducción, potencia reactiva debe ser compensada de conformidad con los requisitos del generador. Esto requiere la prestación de los condensadores correspondientes en el sistema eléctrico. Además, el inversor emite armónicos que deben ser filtrados. Dispositivos de seguridad eléctrica y protección de relámpago Los dispositivos de seguridad eléctrica incluyen principalmente el sistema de protección de relámpago, las luces de advertencia para aviones y un sistema de detección de incendios. Como el tamaño de las turbinas de viento se ha incrementado, un sistema de protección antirrayos se considera indispensable y esto se asocia con una importante instalación eléctrica.

42
Los aerogeneradores están sujetos a diversas cargas mecánicas
Los aerogeneradores están sujetos a diversas cargas mecánicas. El efecto de la torre, el efecto de distorsión del viento, el efecto giroscópico y el impacto de las variaciones de velocidad de viento repentino ponen cargas de fatiga alta en la turbina y en el tren motriz. La turbina debe ser bien diseñada para estas cargas. La mayoría de las investigaciones sobre el diseño de la turbina se centra en la estimación de las cargas en el lado del tren motriz de la turbina. Pero también en el lado de generador del tren motriz son posibles fuentes para presentar pares de torsión fluctuantes debido al hecho de que el par electromagnético del generador es función del tipo de generador, y más o menos dependiente de la voltaje y la frecuencia de la red. La calidad de la potencia se deteriora, por ejemplo, por las fluctuaciones de voltaje o caídas de tensión, que puede llevar a fluctuaciones de torques electromagnético, causando fuertes cargas en el tren motriz. Cabe señalar que, hasta hace poco, la turbinas de viento eran considerados como 'cargas negativas", es decir, como dispositivos de producción de energía, pero que no eran suministrados por el operador de la red. La turbina puede ser conectada o desconectada, de acuerdo con sus propias necesidades. Esto permite fáciles protocolos de seguridad, tales como la desconexión automática en caso de una perturbación de voltaje de red, a fin de evitar que la turbina presente exceso de velocidad o de otros comportamientos inestables.

43
Sin embargo, como la cantidad relativa de energía eólica en algunos sistemas de energía (por ejemplo, Dinamarca, Alemania, España) aumentó drásticamente en la última década, los operadores del sistema de la red eléctrica han emitido requisitos de conexión, especificando cuantitativamente las circunstancias en que una turbina de viento está permitida para desconectarse (por ejemplo, la duración de un interrupción de voltaje) e integrase al red (incremento de potencia reactiva). Estas circunstancias tienden a ser bastante graves. La perturbación causanda por la desconexión o conexión de varios 100 MW de energía eólica en la tensión conduciría a una amplia falla de la red. Por lo tanto una turbina eólica y la granja eólica en su totalidad debe ser capaz de evitar un mal funcionamiento de la red eléctrica por variaciones de volta, potencia reactiva, variaciones de frecuencia, entre otros. La turbina deberá asimismo contribuir a la operación de la red de alimentación para mejorar la calidad de la energía, mediante el suministro de servicios auxiliares. Para el diseño mecánico de un aerogenerador, Esto implica que puede tener que hacer frente a las fluctuaciones de la severas del par, tienen su origen en el lado del generador del tren motriz, con la obligación de permanecer en operación. Hasta ahora, se ha hecho mucha investigación para evaluar las cargas mecánicas originarias en el lado de turbina del tren motriz debido a las características de velocidad del viento, aerodinámica de turbina y eigenvalores mecánicos.

44
Aspectos generales de los sistemas eléctricos de potencia
Se examinan brevemente algunos aspectos básicos de transporte de energía eléctrica pertinentes para la discusión de los generadores de la turbina de viento Three phase system En la mayoría de los casos, la electricidad es transportado por medio sistema de un CA de tres fases. En la figura 1 se muestra un sistema típico de tres fases. Hay tres conductores de fase (A, B, C) y un conductor neutro (N). El sistema es suministrado por una fuente de voltaje equilibrada de tres fases, es decir Note that AC magnitudes are always denoted by their RMS-value. The ratio between a wave’s amplitude and its RMS value is √2 for perfect sine waves. Electrical quantities are often normalized by their rated values. Normalized quantities are denoted by [p.u.] (‘per unit’).
 y un conductor neutro (N). El sistema es suministrado por una fuente de voltaje equilibrada de tres fases, es decir. Note that AC magnitudes are always denoted by their RMS-value. The ratio between a wave’s amplitude and its RMS value is √2 for perfect sine waves. Electrical quantities are often normalized by their rated values. Normalized quantities are denoted by [p.u.] (‘per unit’).")
45
Un sistema balanceado de tres fases de voltaje implica que|UAN| = |UBN| = |UCN|, con una diferencia de fase de exactamente 120 ° entre ellos. La suma de los voltajes de fase es cero. La corriente en cada fase se calcula usando la ley de Ohm, (en la notación de fasor): y Análogamente para las otras dos corrientes de fase. ZA, ZB y ZC, las impedancias en cada fase, están determinadas por la naturaleza de la carga eléctrica en cada fase: pueden ser reales o complejos. Para cargas equilibradas, éstas son iguales. En el caso general de impedancias complejas, Hay una diferencia de fase entre el voltaje y la corriente en una fase, usualmente denotado por‘φ’. Para una carga equilibrada, suministrada por un sistema equilibrado de tres fases de voltaje, la suma de las corrientes en las tres fases es cero, y el conductor neutro en la figura 1 se puede dejar de largo como si éste condujera una correinte ceroo.

46
Para los cálculos con los sistemas eléctricos de potencia, y cuando pueden suponerse que se tienen voltajes y cargas balanceadas, es suficiente con considerar sólo una sola fase y el conductor neutro (puede incluso haber sido omitidos en el sistema real). Los valores calculados para las otras dos fases de las corrientes son los mismos como en la primera fase, pero con defase de 120 ° 240° respectivamente. La figura 2 muestra el equivalente monofásico de la figura 1. La figura 3 se muestra un diagrama de fasor para un sistema de tres fases.

47
El voltaje de la fase de un sistema es la tensión entre una fase y el conductor neutro. El voltaje de línea es la tensión entre dos conductores de fase. Cada línea de voltaje puede ser escrito como la diferencia entre dos voltajes de fase. Voltajes de fase y línea difieren por un factor √3 en la amplitud y 30 ° en el ángulo de fase (figura 4). En su mayoría, es el voltaje de línea que se denota en la placa de identificación de equipos eléctricos de tres fases. El voltaje de línea siempre se puede medir físicamente como la tensión entre dos conductores de fase, incluso si el conductor neutro no está disponible.
. En su mayoría, es el voltaje de línea que se denota en la placa de identificación de equipos eléctricos de tres fases. El voltaje de línea siempre se puede medir físicamente como la tensión entre dos conductores de fase, incluso si el conductor neutro no está disponible..")
48
Potencia activa y reactiva
La potencia aparente S para un sistema de tres fases es un número complejo, dado por: Uf y If indican la voltaje de fase y la corriente del sistema respectivamente, mientras Ul y II denote line voltage and line current. El símbolo * denota el conjugado. El factor 3 (o √3) es necesario porque la potencia total es la suma de la potencia en cada una de las tres fases. La potencia activa P y la potencia reactiva Q son respectivamente:
 es necesario porque la potencia total es la suma de la potencia en cada una de las tres fases. La potencia activa P y la potencia reactiva Q son respectivamente:")
49
Acoplamiento de punto de común y Potencia de corto circuito
Para analizar la interacción entre turbinas eólicas y la red, es importante conocer las características del punto de acoplamiento comunes (PCC), i.e. el punto de red en la que la instalación de energía del viento es conectada (junto con otros usuarios de la red en esa ubicación). Jurídicamente hablado, es el punto donde las competencias del operador de la red terminan y comienzan competencias del operador de las turbinas eólicas. La red, vista desde el PCC, puede ser modelada como una fuente de tensión fija en serie con una impedancia ZGRID. El modelo equivalente monofásico se muestra en la figura 5. La figura muestra, como ejemplo, una carga conectados en paralelo a la turbina. Dependiendo de su comportamiento, una carga puede ser modelada como una impedancia, una fuente de corriente (figura 5) o un modelo más detallado. También la turbina se representa como una fuente de corriente.
, i.e. el punto de red en la que la instalación de energía del viento es conectada (junto con otros usuarios de la red en esa ubicación). Jurídicamente hablado, es el punto donde las competencias del operador de la red terminan y comienzan competencias del operador de las turbinas eólicas. La red, vista desde el PCC, puede ser modelada como una fuente de tensión fija en serie con una impedancia ZGRID. El modelo equivalente monofásico se muestra en la figura 5. La figura muestra, como ejemplo, una carga conectados en paralelo a la turbina. Dependiendo de su comportamiento, una carga puede ser modelada como una impedancia, una fuente de corriente (figura 5) o un modelo más detallado. También la turbina se representa como una fuente de corriente.")
50
Un aspecto importante es la potencia de red en el PCC de cortocircuito
Un aspecto importante es la potencia de red en el PCC de cortocircuito. Es la potencia aparente que podría fluir a través de un cortocircuito en el PCC (Figura 6). De acuerdo con las ecuaciones anteriores, y suponiendo que la carga y la turbina tienen una influencia insignificante en la potencia de cortocircuito, el valor de Ssc (para una fase) se puede escribir como:
. De acuerdo con las ecuaciones anteriores, y suponiendo que la carga y la turbina tienen una influencia insignificante en la potencia de cortocircuito, el valor de Ssc (para una fase) se puede escribir como:")
51
Se desprende (2,8) que|Ssc| es inversamente proporcional con ZGRID
Se desprende (2,8) que|Ssc| es inversamente proporcional con ZGRID. El voltaje en el PCC durante la operación normal de la red y de y la ley de Ohm se tiene: De (2,9) se desprende que, el ZGRID menor (es decir, la mayor|Ssc|), cuanto más baja sea la influencia de la carga y la corriente de la turbina en UPCC. Por lo tanto la más alta potencia de corto circuito en PPC implica que variando la carga o corrientes del aerogenerador (e.g. debido la acción de a una carga de conmutación) causar sólo pequeños disturbios en el voltaje en el PCC, y un usuario de red no debe temer por perturbaciones de la tensión causadas por otros usuarios de la red en el mismo PCC. La potencia de cortocircuitar es por lo tanto, una indicación de que tan cómo fuerte es la red. Para una determinada carga (generador), conectado a un nodo dado, 'la robustez de la red' se define como el la potencia de cortocircuito dividida por la potencia nominal de la carga (generador). En general, la potencia de cortocircuito en un determinado PCC es mayor cuando la red tiene una mayor enmallado cerca del PCC como un enmallado crea muchos posibles caminos paralelos para las corrientes, se reduce el ZGRID. Parques eólicos a menudo están instalados en las zonas rurales o en alta mar, requiriendo una sola line de potencia lejos del enmallado de red. Esto incrementa el ZGRID y disminuye la robustez de la red.
 que|Ssc| es inversamente proporcional con ZGRID. El voltaje en el PCC durante la operación normal de la red y de y la ley de Ohm se tiene: De (2,9) se desprende que, el ZGRID menor (es decir, la mayor|Ssc|), cuanto más baja sea la influencia de la carga y la corriente de la turbina en UPCC. Por lo tanto la más alta potencia de corto circuito en PPC implica que variando la carga o corrientes del aerogenerador (e.g. debido la acción de a una carga de conmutación) causar sólo pequeños disturbios en el voltaje en el PCC, y un usuario de red no debe temer por perturbaciones de la tensión causadas por otros usuarios de la red en el mismo PCC. La potencia de cortocircuitar es por lo tanto, una indicación de que tan cómo fuerte es la red. Para una determinada carga (generador), conectado a un nodo dado, la robustez de la red se define como el la potencia de cortocircuito dividida por la potencia nominal de la carga (generador). En general, la potencia de cortocircuito en un determinado PCC es mayor cuando la red tiene una mayor enmallado cerca del PCC como un enmallado crea muchos posibles caminos paralelos para las corrientes, se reduce el ZGRID. Parques eólicos a menudo están instalados en las zonas rurales o en alta mar, requiriendo una sola line de potencia lejos del enmallado de red. Esto incrementa el ZGRID y disminuye la robustez de la red.")
52
Por lo tanto, es importante que las turbinas de viento sean capaces de controlar su corriente generada hasta un cierto grado, a fin de causar menos perturbaciones de la red y mantener a una constante «calidad de potencia» y también a ser menos sensibles a las perturbaciones de voltaje externos de la red. La fuente de tensión ideal proporciona una tensión perfectamente equilibrada en las tres fases, una onda sinusoidal con frecuencia y magnitud constante. Cuando no se cumplen estas condiciones, se dice que la 'calidad de la potencia' de la red está deteriorada.

53
Harmonic Distortion Distorsión armónica (figura 7) es la desviación periódica de la tensión (o corriente) de la forma de onda sinusoidal ideal. La distorción armónica se produce cuando las frecuencias de múltiplos enteros de la frecuencia fundamental se agregan a la tensión fundamental (o corriente) en forma de onda. La distorsión armónica puede ser causada por la electrónica de potencia en dispositivos tales como rectificadores, variadores de velocidad y otros. Puede llevar a un mal funcionamiento de equipos y de calentamiento excesivo de motores, transformadores y cables.
 es la desviación periódica de la tensión (o corriente) de la forma de onda sinusoidal ideal. La distorción armónica se produce cuando las frecuencias de múltiplos enteros de la frecuencia fundamental se agregan a la tensión fundamental (o corriente) en forma de onda. La distorsión armónica puede ser causada por la electrónica de potencia en dispositivos tales como rectificadores, variadores de velocidad y otros. Puede llevar a un mal funcionamiento de equipos y de calentamiento excesivo de motores, transformadores y cables.")
54
Voltage Unbalance Desequilibrio de voltaje (figura 8) es la diferencia en la fase a neutro o magnitudes de fase a fase de voltaje o ángulos de fase del sistema de las tres fases. Una de las principales causas de tensión desequilibrio es la distribución desigual de cargas monofásicas, que puede cambiar continuamente a través de un sistema de distribución de tres fases.
 es la diferencia en la fase a neutro o magnitudes de fase a fase de voltaje o ángulos de fase del sistema de las tres fases. Una de las principales causas de tensión desequilibrio es la distribución desigual de cargas monofásicas, que puede cambiar continuamente a través de un sistema de distribución de tres fases.")
55
Transitorios Los transitorios (figura 9) son las desviaciones súbitas y significativas de tensión normal o de los niveles de carga, suelen tener una duración corta (μs o ms). Que normalmente son causados por descargas electrostáticas, rayos, entre otros.
 son las desviaciones súbitas y significativas de tensión normal o de los niveles de carga, suelen tener una duración corta (μs o ms). Que normalmente son causados por descargas electrostáticas, rayos, entre otros.")
56
Voltage Dips and Swells
A voltage dip (Figure 10) is a decrease in voltage values for a short duration. Causes of voltage dips are short circuits on the electric power system and motor starting. Voltage dips may be further classified according to the depth of the dip and the occurrence of the dip in one, two or three phases. A voltage swell (Figure 11) is an increase in voltage values for a short duration. Voltage swells lasting longer than a certain time duration, e.g. two minutes, are classified as overvoltages. Voltage swells and overvoltages are commonly caused by large load changes and power-line switching.
 is a decrease in voltage values for a short duration. Causes of voltage dips are short circuits on the electric power system and motor starting. Voltage dips may be further classified according to the depth of the dip and the occurrence of the dip in one, two or three phases. A voltage swell (Figure 11) is an increase in voltage values for a short duration. Voltage swells lasting longer than a certain time duration, e.g. two minutes, are classified as overvoltages. Voltage swells and overvoltages are commonly caused by large load changes and power-line switching.")
57
Frequency Variations Normal utility power in Europe is supplied at 50 Hz. In large interconnected utility systems such as the European one, the frequency is extremely stable and deviations are seldom a problem. However, in smaller power systems, especially those supplied by on-site generators, frequency deviations (Figure 12) can cause equipment to malfunction: it may affect the behaviour of frequency-steered power electronic devices and clocks.
 can cause equipment to malfunction: it may affect the behaviour of frequency-steered power electronic devices and clocks.")
58
Flicker El parpadeo (figura 13) consiste en cambios de amplitud de voltaje periódicos pequeños, que se producen en las frecuencias entre 0.5 Hz y 25 Hz. Es causada por cargas fluctuantes o generadores fluctuantes, como turbinas de viento. Especialmente el «efecto de la torre» en turbinas de viento crea una la ligera disminución en la par mecánico (y, por lo tanto, producción de energía) cada vez que una de las palas pasa al frente de la torre. Parpadeo es rara vez perjudicial para equipos electrónicos, pero es molesto porque causa cambios notables en los niveles de iluminación como relampagueo.
 consiste en cambios de amplitud de voltaje periódicos pequeños, que se producen en las frecuencias entre 0.5 Hz y 25 Hz. Es causada por cargas fluctuantes o generadores fluctuantes, como turbinas de viento. Especialmente el «efecto de la torre» en turbinas de viento crea una la ligera disminución en la par mecánico (y, por lo tanto, producción de energía) cada vez que una de las palas pasa al frente de la torre. Parpadeo es rara vez perjudicial para equipos electrónicos, pero es molesto porque causa cambios notables en los niveles de iluminación como relampagueo.")
59
Modelación de aerogeneradores en software de simulación de sistema de alimentación
Modelos de turbina de viento generalmente consisten por lo general los siguientes elementos: - Modelo de velocidad del viento: principalmente utiliza una serie de tiempo de los valores de la velocidad de viento medidos. También se pueden generar las velocidades de viento como señales de estocásticas, basadas en una función de densidad espectral de potencia. - Modelo aerodinámico de la turbina: principalmente una fórmula aproximada para el coeficiente de rendimiento CP, en función de la velocidad del viento, la velocidad de la turbina y el diseño de la turbina. Para los modelos más detallados, puede utilizarse el BEM (módulo Element Method). - Modelo para el acoplamiento de eje y la caja de cambios - Modelo de generador, que contiene las ecuaciones diferenciales de voltaje y ecuaciones de flujo, principalmente en un marco de referencia de rotor o estátor-flujo orientado (d, q), así como la ecuación de par y movimiento. - Modelos para los dispositivos electrónica de potencia. Modelos para el control Relays de protección. - Modelo de red: para la evaluación de la conducta de la turbina de viento, es suficiente modelar la red como una fuente de tensión con potencia de cortocircuito.
. - Modelo para el acoplamiento de eje y la caja de cambios. - Modelo de generador, que contiene las ecuaciones diferenciales de voltaje y ecuaciones de flujo, principalmente en un marco de referencia de rotor o estátor-flujo orientado (d, q), así como la ecuación de par y movimiento. - Modelos para los dispositivos electrónica de potencia. Modelos para el control. Relays de protección. - Modelo de red: para la evaluación de la conducta de la turbina de viento, es suficiente modelar la red como una fuente de tensión con potencia de cortocircuito.")
Presentaciones similares



>")

















