Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Javier A. Chauvin

4
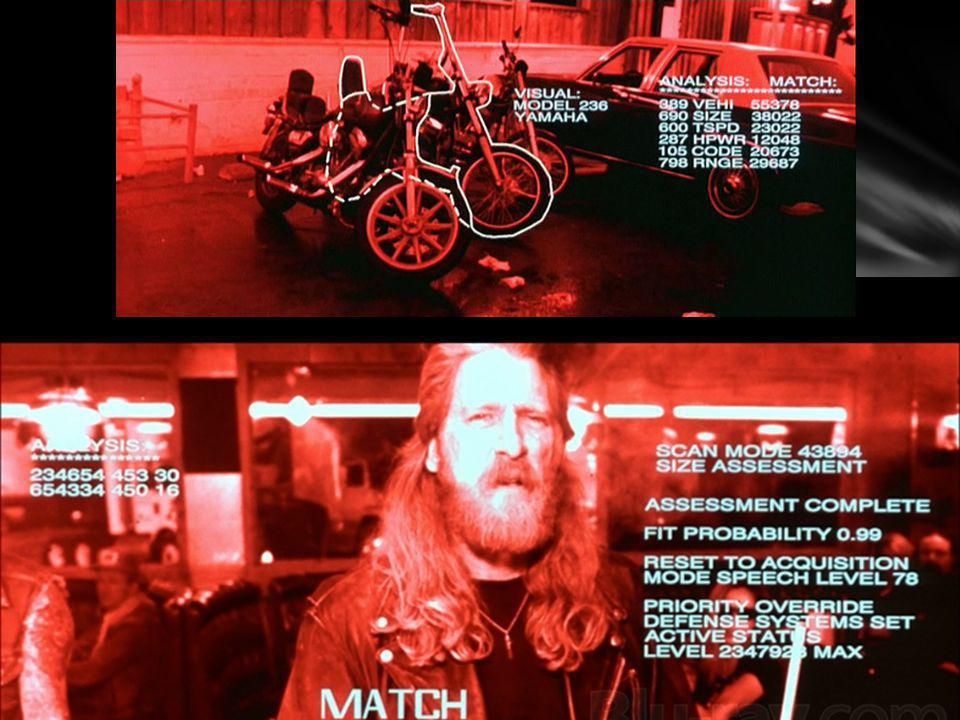
Cámara Tag θ d Que se va ha hacer? Captura tiempo real Video

6
Imagen Digital Matriz de pixeles Valor = 1 Fila 1 Columna 1

7
Valores : 0 ó 1Valores : 0 -1Valores : 1 – 255 BinariaIntensidadColor IMAGENES

8
Imagen RGB

9
1 Detección de BORDES y Dilation 2 MANCHAS Coordenadas y Posiciones 3 FILTRAJE Manchas 4 VERTICES Externos 5 Eliminación de PROYECCIÓN 6 DECODIFICACION y lectura del TAG Algoritmo

10
Adquisición 240 320 15 Cuadros por segundo RGB_240x320 Descripción del Algoritmo

11
Color a imagen de intensidades

12
Detección de bordes Algoritmo de Canny In = Intensidades(240,320)Out = Binaria (240,320)
Out = Binaria (240,320)")
13
Operación morfológica Dilation

14
Manchas IN = Imagen binaria (240,320) OUT = Imagen de intensidades (200,200) contiene el tag Alto / Ancho ~ 1 35 < ancho < 200 35 < alto < 200 Max std > 50 (fila del medio)
 OUT = Imagen de intensidades (200,200) contiene el tag Alto / Ancho ~ 1 35 < ancho < < alto < 200 Max std > 50 (fila del medio)")
15
Vértices Menor distancia a bordes Error coordenadas repetidas fila o columna Hallar cuarto punto. Unir vector puntos sentido horario. Listo para función.

16
Eliminación de Proyección

17
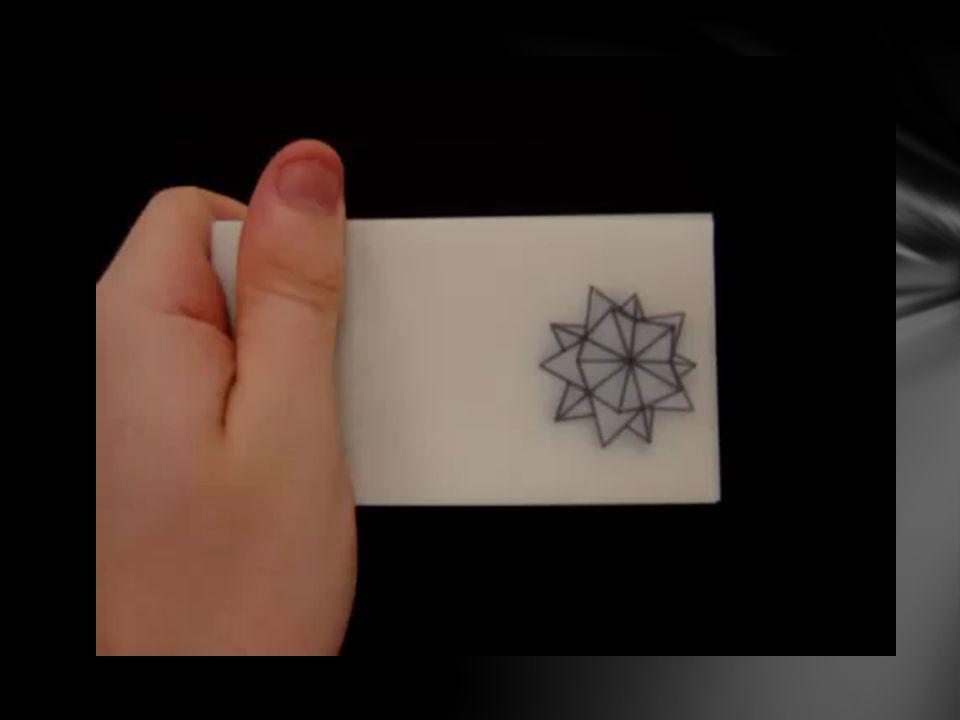
Lectura del Tag Bit menos significativo Bit más significativo 2929 2828 2727 2626 2525 2424 23232 2121 2020 0100000100 = 260

18
Cámara Tag θ d Disposición de elementos

22
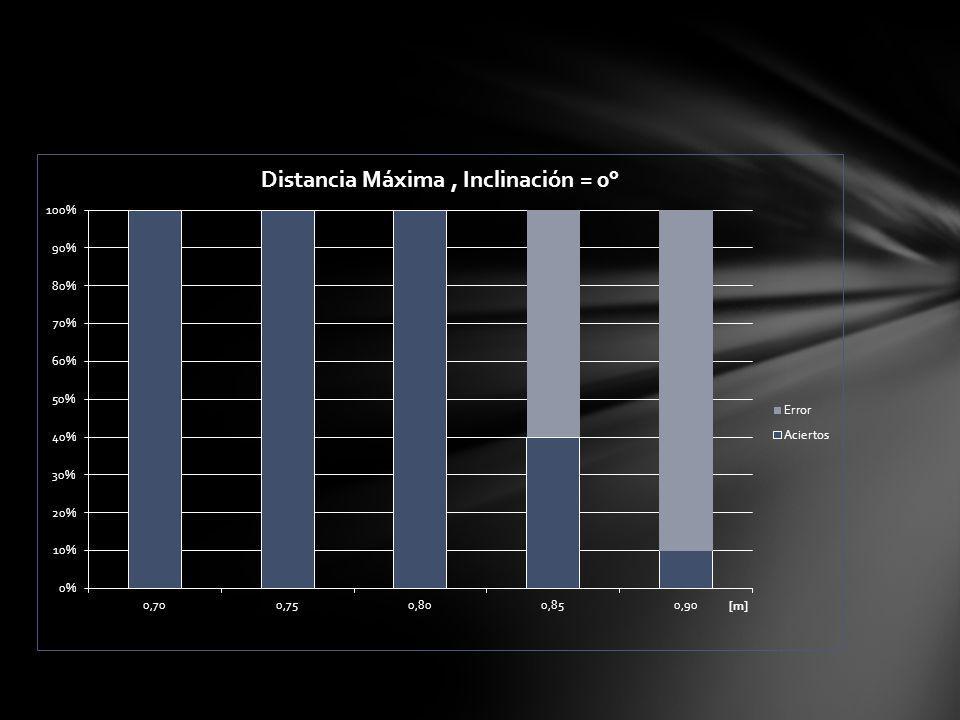
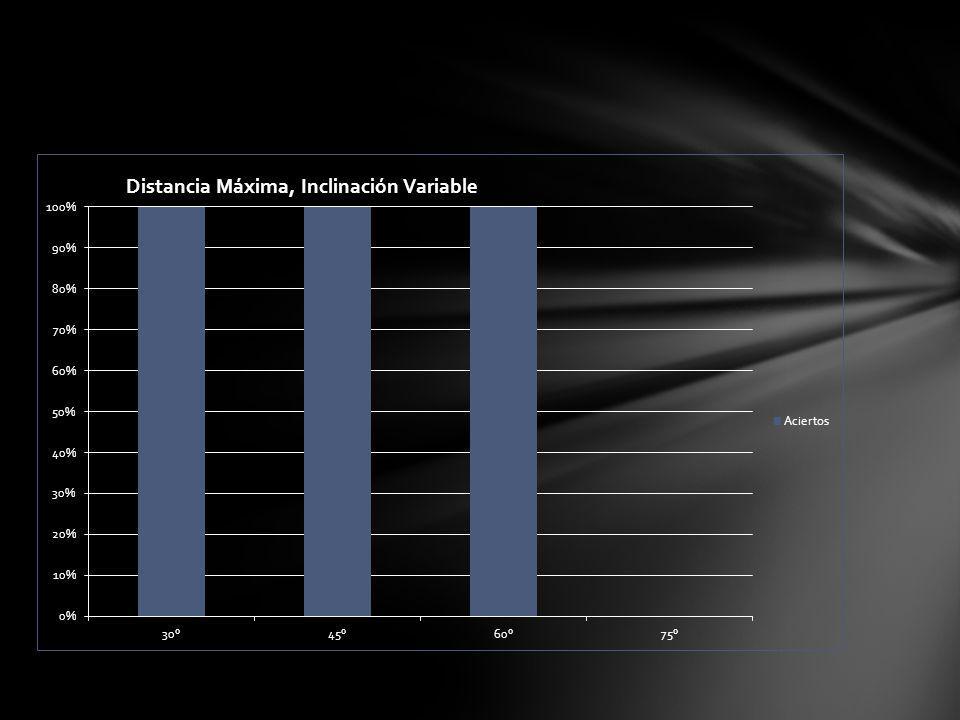
Realización de algoritmo lector de Tags. Distancia inversamente proporcional a la cantidad de pixeles en representación. División de algoritmo en sub algoritmos. Mayor tiempo de procesamiento a mayor resolución de video. Conclusiones y Recomendaciones

23
FIN

Presentaciones similares





>")















>")