Descargar la presentación
La descarga está en progreso. Por favor, espere

2
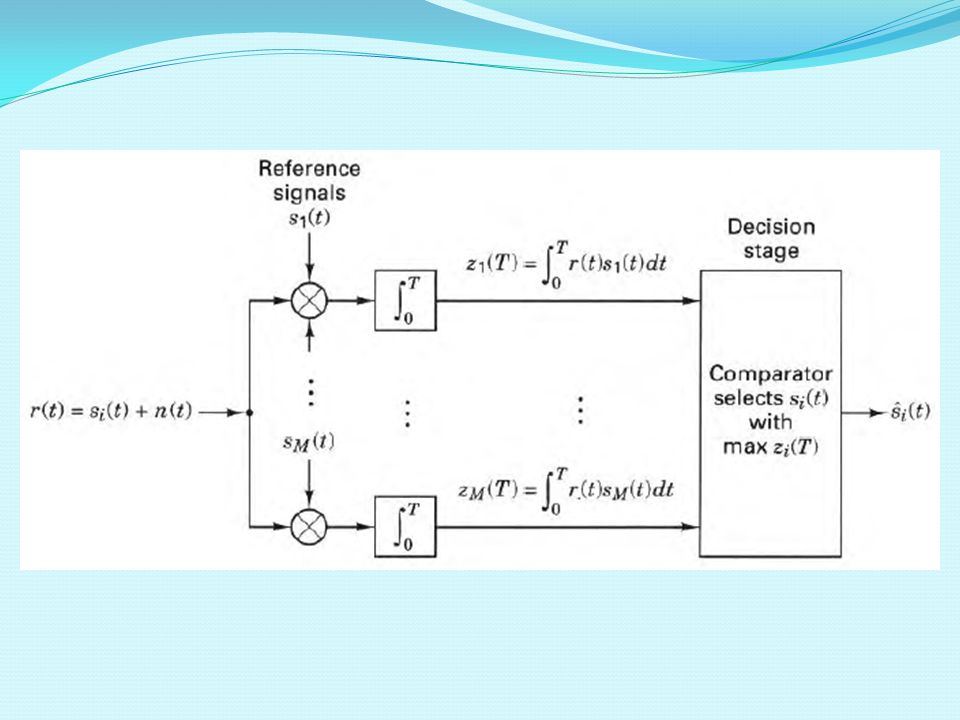
DETECCION COHERENTE DE PSK El detector mostrado en la figura puede ser usado para la detección coherente de cualquier forma de onda digital. Este detector de correlación es llamado comúnmente detector de máxima posibilidad. Supongamos una señal BPSK:

3
y proceso aleatorio blanco Gausiano de valor medio cero Donde el término de fase es una constante arbitraria, de tal manera que el análisis no se afecta si establecemos. El parámetro es la energía por símbolo de la señal, y es la duración de símbolo. Para este caso de antípodas, solo se necesita una función base.

4
Si se asume un espacio de señales ortonormales, podemos expresar una función base como: Podemos entonces expresar las señales transmitidas,, en términos de como: Vamos a sumir que se ha transmitido. Los valores esperados para los integradores de productos con referencia de señal se encuentran como:

5
Donde denota el promedio del conjunto llamado el valor esperado.

6
La etapa de decisión debe decidir que señal fue transmitida, determinando su localización dentro del espacio de señal. La etapa de decisión escoge la señal con el mayor valor de En este ejemplo se decide que la señal recibida fue.

7
Muestreo del Filtro Acoplado Anteriormente se trataron las características básicas del filtro acoplado; su respuesta al impulso es una versión retrasada de la imagen espejo (rotada en el eje t = 0) de la señal de entrada. La respuesta al impulso se describe mediante:

8
La función básica de un correlator es correlacionar la señal entrante (ruidosa) con cada una de las señales de referencia y determinar con cual de ellas presenta mayor concordancia. Las operaciones de multiplicación e integración realizadas entre las señales implica el uso de hardware análogo y señales continuas. Esto no muestra de que manera se puede implementar el correlator o filtro acoplado usando técnicas digitales y señales muestreadas.

9
Implementación del filtro acoplado

10
La figura anterior muestra como se puede implementar un filtro acoplado usando hardware digital. La señal de entrada comprende una señal prototipo s i (t) más ruido n(t), y el ancho de banda de la señal es W = (½)T, donde T es el tiempo de símbolo. La mínima tasa de muestreo es f s = 2W = 1/T y el tiempo de muestreo T s debe ser igual o menor a el tiempo de símbolo. Lo anterior quiere decir que debe haber por lo menos una muestra por cada símbolo.
 más ruido n(t), y el ancho de banda de la señal es W = (½)T, donde T es el tiempo de símbolo. La mínima tasa de muestreo es f s = 2W = 1/T y el tiempo de muestreo T s debe ser igual o menor a el tiempo de símbolo. Lo anterior quiere decir que debe haber por lo menos una muestra por cada símbolo..")
11
En sistemas reales este muestreo se realiza a una tasa que excede la tasa mínima de Nyquist en un factor de 4 ó más. El único costo para esto es la velocidad del procesador, no el ancho de banda de transmisión. En los tiempos de reloj de t = kT, las muestras son deslizadas dentro del registrador de tal manera que las primeras muestras se ubican a la derecha de las muestras más recientes. Una vez que la señal recibida ha sido muestreada la notación de tiempo continuo t se cambia por k para usar una notación discreta. El índice i hace referencia a un símbolo particular en el conjunto M-ario y k es el índice del tiempo de muestreo.

12
En la figura superior, el registro de desplazamiento, con sus coeficientes o pesos, c i (n), se aproxima a un MF, donde; Es el índice de tiempo de los pesos y etapas del registro. En este ejemplo N = 4 representa el número de etapas del registro y el número de muestras por símbolo.

13
La sumatoria se realiza entre los tiempos n = 0 y n = 3. A continuación del sumador se debe tomar una decisión de símbolo una vez que las cuatro muestras han llegado al registrador. El ejemplo usa por simplicidad solo tres valores de amplitud, (0, ±1) para las muestras. En un sistema real cada muestra (y peso) debe ser representada por entre 6 y 10 bits dependiendo de la densidad de la constelación de la señal. El conjunto de pesos del filtro {c i (n)} conforman la respuesta al impulso del filtro; los pesos son emparejados a las muestras de la señal de acuerdo a la forma discreta de la ecuación ;
 para las muestras. En un sistema real cada muestra (y peso) debe ser representada por entre 6 y 10 bits dependiendo de la densidad de la constelación de la señal. El conjunto de pesos del filtro {c i (n)} conforman la respuesta al impulso del filtro; los pesos son emparejados a las muestras de la señal de acuerdo a la forma discreta de la ecuación ;.")
14
Si se usa la forma discreta de la integral de convolución tenemos que la salida en un instante correspondiente a la muestra k-esima se puede expresar como: El índice k representa el tiempo tanto para las muestras recibidas como para la salida del filtro y n es una variable de tiempo. En la expresión r(k-n) podemos tomar a n como la edad de las muestras (que tan lejos está situada en el filtro) En la expresión c i (n) podemos tomar a n como la dirección del peso.
 podemos tomar a n como la edad de las muestras (que tan lejos está situada en el filtro) En la expresión c i (n) podemos tomar a n como la dirección del peso..")
15
Se asume que como el sistema está sincronizado, los tiempos de símbolo son conocidos. Se asume también que el ruido tiene valor medio cero, de tal forma que el valor esperado de una muestra recibida es: De esta forma, si s i (t) es transmitida, la salida esperada del filtro acoplado es:
 es transmitida, la salida esperada del filtro acoplado es:.")
16
Los indices de referencia, n, de los pesos están en orden inverso comparados con los de tiempo, k-n, de las muestras. Esto se debe a que las operaciones matemáticas de un MF se describen como la integral de convolución de una señal con la respuesta al impulso del filtro. La respuesta final es la correlación de una señal con su propia réplica retrasada.

17
En la figura se dibuja la forma de onda prototipo como función del tiempo. Se puede ver que las muestras más a la izquierda (amplitud +1) representa la primera muestra en el tiempo k = 0. Si asumimos que s 1 fue enviada y se descarta el ruido, podemos llamar a las muestras recibidas de r(k) como s 1 (k) a medida que las muestras llenan las etapas del MF. Al final de cada tiempo de símbolo la muestra k = 0 se localiza en la etapa más a la derecha de cada registro.
 representa la primera muestra en el tiempo k = 0. Si asumimos que s 1 fue enviada y se descarta el ruido, podemos llamar a las muestras recibidas de r(k) como s 1 (k) a medida que las muestras llenan las etapas del MF. Al final de cada tiempo de símbolo la muestra k = 0 se localiza en la etapa más a la derecha de cada registro..")
18
DETECCION COHERENTE DE MPSK La figura 2 muestra el espacio de señal para un conjunto de señales MPSK; esta describe una PSK de cuatro niveles (4-aria) ó QPSK (Quadriphase Shift Keying). En el transmisor, los dígitos binarios son recolectados de a dos, y por cada intervalo de símbolo, los dos dígitos secuenciales le dicen al modulador cual de las cuatro formas de onda debe producir. Figura 2

19
Para los sistemas MPSK coherentes puede ser expresada como: Donde es la energía recibida de la forma de onda sobre cada duración de símbolo, y es la frecuencia portadora. Si se toma un espacio de señal ortonormal tenemos el conjunto de ejes: Donde la amplitud se escoge para normalizar el valor esperado de salida del detector.

20
Ahora se puede escribir en términos de estas coordenadas ortonormales: Esta ecuación describe un conjunto de múltiples formas de onda (intrínsecamente no ortogonales) en términos de solamente dos componentes de onda portadora ortogonales. El caso de (QPSK), es único entre los conjuntos de señal MPSK en el sentido en que el conjunto de formas de onda QPSK están representados por una combinación de miembros antípodas y ortogonales.
, es único entre los conjuntos de señal MPSK en el sentido en que el conjunto de formas de onda QPSK están representados por una combinación de miembros antípodas y ortogonales..")
21
Los bordes ó límites de decisión, particionan el espacio de señal en regiones. La regla de decisión para el detector es decidir que fue transmitida, si el vector de señal recibida cae dentro de la región 1, y de igual manera para los demás. Dicho de otra forma, la regla de decisión es escoger la forma de onda Si es la salida mayor del correlator. La forma del correlator implica que siempre hay productos de correlatores usados para la demodulación de MPSK. De la figura se infiere que para cada una de las ramas se debe configurar una señal de referencia con el corrimiento de fase apropiado.

23
En la práctica, la implementación de un modulador MPSK solo requiere de integradores de producto independientemente del tamaño del conjunto de señales. Este ahorro en implementación es posible debido a que cualquier conjunto arbitrario de formas de onda integrables se pueden expresar como una combinación lineal de formas de onda ortogonales. Figura 3

24
La señal recibida se puede expresar mediante combinación de ecuaciones: Donde y es un proceso de ruido blanco Gaussiano de valor medio cero. En la figura 3 solamente tenemos dos formas de onda de referencia ó funciones base, para la parte superior del correlator y para la parte inferior del correlator. La parte superior del correlator calcula La parte inferior del correlator calcula

25
La figura 4 muestra que el cálculo del ángulo de fase recibido puede ser realizado mediante la arc tang de, donde puede ser analizado como la componente en fase de la señal recibida, es la componente en cuadratura y es una estimación ruidosa del transmitido En otras palabras, el correlator superior produce una salida, la magnitud de la proyección en fase del vector, y el correlator inferior produce una salida, la magnitud de la proyección en cuadratura del vector, donde es el vector representación de. figura 4

26
Las salidas y de los correlatores alimentan al bloque marcado como. El valor resultante del ángulo es comparado con cada uno de los ángulos de fase prototipo,. El demodulador selecciona el que está más cercano al ángulo. En otras palabras, el demodulador calcula para cada uno de los prototipo y escoge aquel que produce la salida más pequeña.

27
DETECCION COHERENTE DE FSK La modulación FSK se caracteriza porque la información está contenida en la frecuencia de la portadora. Un conjunto típico de formas de onda de señales FSK se describió mediante la ecuación: Donde es el contenido de energía de sobre cada duración de símbolo. El término es una constante arbitraria y puede ser igual a cero.

28
Asumiendo que las funciones base forman un conjunto ortonormal, la forma más conveniente para es: Donde la amplitud normaliza la salida esperada para el filtro acoplado.

29
El vector señal prototipo i-esimo, está localizado en el i- esimo eje de coordenadas, desplazado del origen del espacio de señal. En este esquema, para el caso general M- ario y una dada, la distancia entre cualesquiera dos prototipos de vectores de señal y es constante: La figura de la derecha muestra los vectores de señal prototipos y las regiones de decisión para un esquema de señalización FSK ortogonal detectado coherentemente (M=3).
..")
30
Una escogencia natural para el tamaño M de un conjunto de señalización es cualquier valor que sea potencia de dos. Sin embargo, en este caso, la razón para la escogencia poco ortodoxa de M=3 es la siguiente: deseamos examinar un conjunto de señalización que sea mayor que el binario, y el espacio de señalización para la señalización se visualiza mejor si se tienen ejes mutuamente perpendiculares. No es posible, para más de tres ejes, tener una noción de mutua perpendicularidad en forma visual. Al igual que en el caso de PSK, el espacio de señal está particionado dentro de M regiones distintas, cada una de las cuales contiene un vector de señal prototipo; en este ejemplo, debido a que la región de decisión es tridimensional, los bordes de decisión son planos, en lugar de líneas.

31
La regla de decisión óptima es decidir que la señal transmitida pertenece a la clase cuyo índice corresponde a la región donde se encuentra la señal recibida. La figura muestra un vector de señal recibida, el cual se encuentra en la región 2. usando la regla de decisión indicada anteriormente, el detector clasifica como la señal. Como el ruido es un vector aleatorio Gaussiano, hay una Probabilidad mayor a cero de que pueda ser producido por otra señal diferentes de.

32
Por ejemplo, si el transmisor ha enviado, entonces será la suma de la señal más el ruido, y la decisión de escoger será la correcta.

33
Sin embargo, si el transmisor ha enviado, entonces será la suma de la señal más ruido, y la decisión de seleccionar será un error.

34
FIN

Presentaciones similares



>")
















