Descargar la presentación
La descarga está en progreso. Por favor, espere

1
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA PROGRAMA DE INGENIERIA ELECTRONICA Curso de Control Análogo

2
SISTEMAS Combinación de componentes que actúan juntos para alcanzar un objetivo determinado Están compuestos por: - una (o más) entradas independientes (variables manipuladas) una (o más) salidas resultantes (variables controladas).
 entradas independientes (variables manipuladas) una (o más) salidas resultantes. (variables controladas).")
3
DEFINICIONES IMPORTANTES
Variable controlada: Cantidad o condición que se mide y controla (generalmente la salida del sistema) Variable manipulada o señal de control: Cantidad o condición que el controlador modifica para afectar el valor de la variable controlada corrigiendo o limitando la desviación entre el valor medido y el valor deseado (controlar) Planta: Cualquier objeto físico que se vaya a controlar Perturbaciones: Señal que tiende a afectar el valor de la salida de un sistema. Pueden ser internas o externas Control realimentado: Operación que en presencia de perturbaciones tiende a reducir la diferencia entre la salida de un sistema y una entrada de referencia
 Variable manipulada o señal de control: Cantidad o condición que el controlador modifica para afectar el valor de la variable controlada corrigiendo o limitando la desviación entre el valor medido y el valor deseado (controlar) Planta: Cualquier objeto físico que se vaya a controlar. Perturbaciones: Señal que tiende a afectar el valor de la salida de un sistema. Pueden ser internas o externas. Control realimentado: Operación que en presencia de perturbaciones tiende a reducir la diferencia entre la salida de un sistema y una entrada de referencia.")
4
EJEMPLOS DE SISTEMAS

5
EJEMPLOS DE SISTEMAS

6
SISTEMAS DE CONTROL LAZO ABIERTO

7
+ - SISTEMAS DE CONTROL LAZO CERRADO
Son los sistemas en los que la acción de control está en función de la señal de salida

8
SISTEMAS DE CONTROL LAZO CERRADO

9
MODELO MATEMÁTICO DE UN SISTEMA
Es una réplica de las relaciones entre entrada y salida o entradas y salidas, donde dichas relaciones se sustituyen por expresiones matemáticas. Componente Símbolo Ecuación Resistencia 𝑣 𝑡 =𝑖 𝑡 ∙𝑅 Condensador 𝑣 𝑡 = 1 𝐶 𝑖(𝑡)𝑑𝑡 Bobina 𝑣 𝑡 =𝐿 𝑑𝑖(𝑡) 𝑑𝑡
𝑑𝑡. Bobina. 𝑣 𝑡 =𝐿 𝑑𝑖(𝑡) 𝑑𝑡.")
10
MODELO MATEMÁTICO DE UN SISTEMA
𝑮 Entrada Salida

11
EJEMPLO MODELO MATEMÁTICO RLC

12
EJEMPLO MODELO MATEMÁTICO RLC
𝑉 𝑜 𝑠 = 𝑉 𝑐 (𝑠) 𝑉 𝑖 (𝑠) 𝑉 𝑐 (𝑠)
 𝑉 𝑖 (𝑠) 𝑉 𝑐 (𝑠)")
13
Función de transferencia en lazo abierto
𝑭𝒖𝒏𝒄𝒊𝒐𝒏 𝒅𝒆 𝒕𝒓𝒂𝒏𝒔𝒇𝒆𝒓𝒆𝒏𝒄𝒊𝒂= 𝑺𝒂𝒍𝒊𝒅𝒂 𝑬𝒏𝒕𝒓𝒂𝒅𝒂 =𝑮𝟏∗𝑮𝟐∗…∗𝑮𝒏 Entrada Salida G1*G2*…*Gn

14
Función de transferencia en lazo cerrado
𝑭𝒖𝒏𝒄𝒊𝒐𝒏 𝒅𝒆 𝒕𝒓𝒂𝒏𝒔𝒇𝒆𝒓𝒆𝒏𝒄𝒊𝒂= 𝑺𝒂𝒍𝒊𝒅𝒂 𝑬𝒏𝒕𝒓𝒂𝒅𝒂 = 𝑮 𝟏+𝑮𝑯 Entrada Salida 𝑮 𝟏+𝑮𝑯

15
TIPOS DE TRAYECTORIAS

16
COMPONENTES DE UN LAZO CERRADO

17
FUNCION DE TRANSFERENCIA DEL LAZO CERRADO

18
Error en estado estable
Es la diferencia entre la salida del sistema y su entrada bajo condiciones de estado estable.

19
Error en estado estable
Para un sistema en lazo abierto se tiene que: Para un sistema en lazo cerrado se tiene que:

23
Ejemplo: Hallar error en estado estable en el siguiente sistema para una entrada escalón de magnitud 10

24
EFECTOS DE LAS PERTURBACIONES EN UN SISTEMA
Sistema de control en lazo abierto con una perturbación

25
Sistema de control en lazo cerrado con una perturbación

26
ESTABILIDAD DE LOS SISTEMAS DE CONTROL
a) Estable b) inestable
 Estable b) inestable.")
27
Función de transferencia en lazo cerrado
POLOS Y CEROS Función de transferencia en lazo cerrado Ecuación característica Z1, Z2,….., Zm: Ceros P1, P2,….., Pn: Polos K: Ganancia

28
POLOS Y CEROS REALES Y COMPLEJOS

29
PATRÓN DE POLOS Y CEROS Cero en 1; Polo en -1+j

30
RELACIÓN ENTRE POSICIÓN DE POLOS Y ESTABILIDAD

32
CRITERIO DE ESTABILIDAD DE ROUTH-HURWITZ

33
ECUACIÓN CARACTERÍSTICA

34
ANÁLISIS POR SIMPLE INSPECCIÓN

35
ARREGLO DE ROUTH-HURWITZ CON n=5

36
ANÁLISIS CON EL ARREGLO
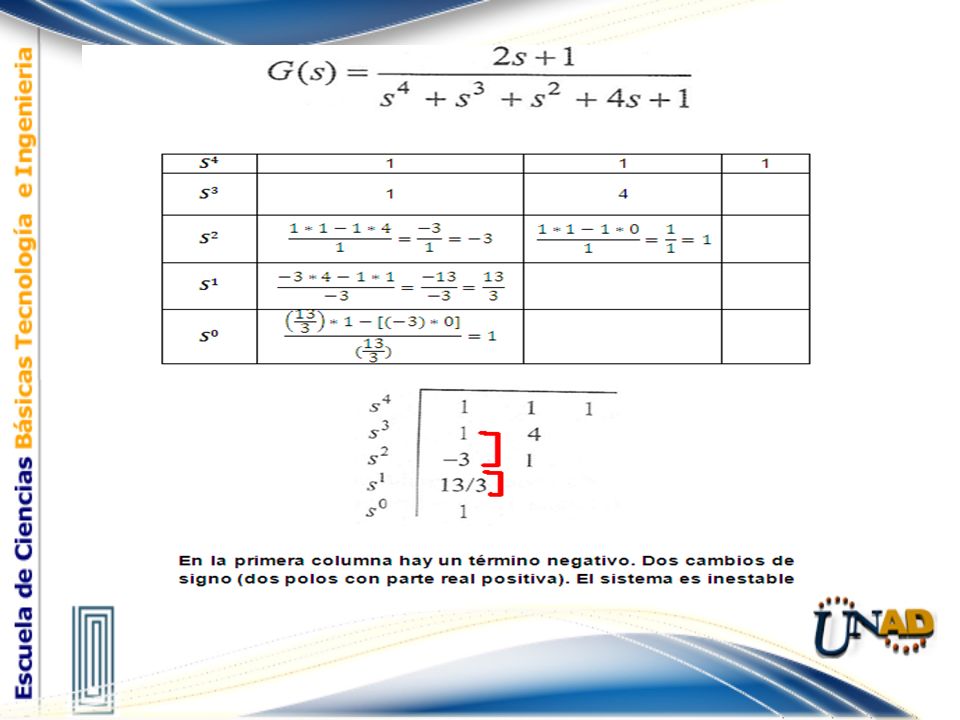
Si todos los elementos de la primera columna son positivos, quiere decir que todos los polos (raíces de la ecuación característica) están al lado izquierdo del patrón de polos y ceros (parte real negativa). El sistema es estable Si algún término de la primera columna es negativo, el número de cambios de signo en dicha columna es el mismo número de raíces (polos) con parte real positiva. El sistema es inestable
 están al lado izquierdo del patrón de polos y ceros (parte real negativa). El sistema es estable. Si algún término de la primera columna es negativo, el número de cambios de signo en dicha columna es el mismo número de raíces (polos) con parte real positiva. El sistema es inestable.")
39
RESPUESTA EN EL TIEMPO DE UN SISTEMA DE CONTROL
Respuesta transitoria: Estado inicial estado final Respuesta en estado estacionario: Comportamiento de la salida cuando el tiempo tiende a infinito

40
SEÑALES DE PRUEBA TÍPICAS

41
SISTEMAS DE PRIMER ORDEN

42
RESPUESTA ESCALON SISTEMAS DE PRIMER ORDEN
K: ganancia estática T: constante de tiempo Tiempo de subida: 2.2T Tiempo de asentamiento: 4T Sin sobre impulso

43
RESPUESTA RAMPA SISTEMAS DE PRIMER ORDEN

44
RESPUESTA IMPULSO SISTEMAS DE PRIMER ORDEN

45
SISTEMAS DE SEGUNDO ORDEN

46
COMPORTAMIENTO SISTEMAS DE SEGUNDO ORDEN

47
RESPUESTA ESCALON SISTEMAS DE SEGUNDO ORDEN (0<ζ<1) y ζ=0
 y ζ=0")
48
RESPUESTA ESCALON SISTEMAS DE SEGUNDO ORDEN ζ=1 y ζ>1

49
tr : tiempo de subida (0-100)% ó (10-90)% del valor final
PARÁMETROS RESPUESTA ESCALÓN UNITARIO SISTEMA DE SEGUNDO ORDEN SUBAMORTIGUADO tr : tiempo de subida (0-100)% ó (10-90)% del valor final td: tiempo de retardo (0-50)% del valor final tp: tiempo pico (0-máximo sobreimpulso) Mp: máximo sobreimpulso ts: tiempo de establecimiento (0 – rango de 2% ó 5% alrededor del valor final)
% ó. (10-90)% del valor final. td: tiempo de retardo (0-50)% del valor final. tp: tiempo pico (0-máximo sobreimpulso) Mp: máximo sobreimpulso. ts: tiempo de establecimiento (0 – rango de 2% ó 5% alrededor del valor final)")
50
REPRESENTACIÓN DE SISTEMAS EN ESPACIO DE ESTADOS

51
EJEMPLO Circuito RLC

52
ECUACIÓN DIFERENCIAL DEL SISTEMA
VARIABLES DE ESTADO

53
Reemplazamos i(t) y su integral por X2 y X1
Despejamos di(t)/dt 𝐿 𝑑𝑖(𝑡) 𝑑𝑡 =− 1 𝐶 𝑖 𝑡 𝑑𝑡−𝑅𝑖 𝑡 +𝑉(𝑡) 𝑑𝑖(𝑡) 𝑑𝑡 =− 1 𝐿𝐶 𝑖 𝑡 𝑑𝑡− 𝑅 𝐿 𝑖 𝑡 + 𝑉(𝑡) 𝐿 Reemplazamos i(t) y su integral por X2 y X1
/dt. 𝐿 𝑑𝑖(𝑡) 𝑑𝑡 =− 1 𝐶 𝑖 𝑡 𝑑𝑡−𝑅𝑖 𝑡 +𝑉(𝑡) 𝑑𝑖(𝑡) 𝑑𝑡 =− 1 𝐿𝐶 𝑖 𝑡 𝑑𝑡− 𝑅 𝐿 𝑖 𝑡 + 𝑉(𝑡) 𝐿. Reemplazamos i(t) y su integral por X2 y X1.")
54
Resumiendo: 𝑑𝑋1(𝑡) 𝑑𝑡 𝑑𝑋2(𝑡) 𝑑𝑡 = 0 1 − 1 𝐿𝐶 − 𝑅 𝐿 𝑋1(𝑡) 𝑋2(𝑡) 𝐿 0 𝑉(𝑡)
 𝑑𝑡 𝑑𝑋2(𝑡) 𝑑𝑡 = 0 1 − 1 𝐿𝐶 − 𝑅 𝐿 𝑋1(𝑡) 𝑋2(𝑡) + 1 𝐿 0 𝑉(𝑡)")
55
Tomando como salida del sistema el voltaje del condensador:
𝑉𝑐= 1 𝐶 𝑖(𝑡) 𝑉𝑐 = 𝑋1(𝑡) 𝑋2(𝑡) 𝑉(𝑡)
 𝑉𝑐 = 1 0 𝑋1(𝑡) 𝑋2(𝑡) + 0 𝑉(𝑡)")
56
Representación de todo el sistema en espacio de estado:
𝑑𝑋1(𝑡) 𝑑𝑡 𝑑𝑋2(𝑡) 𝑑𝑡 = 0 1 − 1 𝐿𝐶 − 𝑅 𝐿 𝑋1(𝑡) 𝑋2(𝑡) 𝐿 0 𝑉(𝑡) 𝑉𝑐 = 𝑋1(𝑡) 𝑋2(𝑡) 𝑉(𝑡)
 𝑑𝑡 𝑑𝑋2(𝑡) 𝑑𝑡 = 0 1 − 1 𝐿𝐶 − 𝑅 𝐿 𝑋1(𝑡) 𝑋2(𝑡) + 1 𝐿 0 𝑉(𝑡) 𝑉𝑐 = 1 0 𝑋1(𝑡) 𝑋2(𝑡) + 0 𝑉(𝑡)")
57
CONTROLABILIDAD Y OBSERVABILIDAD

58
n = Orden del sistema = número de variables de estado
Controlabilidad Recordemos que un sistema dinámico puede ser controlable si es posible alcanzar en un tiempo determinado (finito) un estado deseado a partir de un estado inicial; es decir, si el sistema puede llegar a un set-point determinado en un tiempo finito n = Orden del sistema = número de variables de estado Si el rango de C es igual al orden del sistema, el sistema puede ser controlable
 un estado deseado a partir de un estado inicial; es decir, si el sistema puede llegar a un set-point determinado en un tiempo finito. n = Orden del sistema = número de variables de estado. Si el rango de C es igual al orden del sistema, el sistema puede ser controlable.")
59
n = Orden del sistema = número de variables de estado
Observabilidad Se dice que un sistema es observable si conociendo la entrada u y la salida y es posible determinar el estado x n = Orden del sistema = número de variables de estado Si el rango de C es igual al orden del sistema, el sistema puede ser controlable

Presentaciones similares