Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Algebra lineal

2
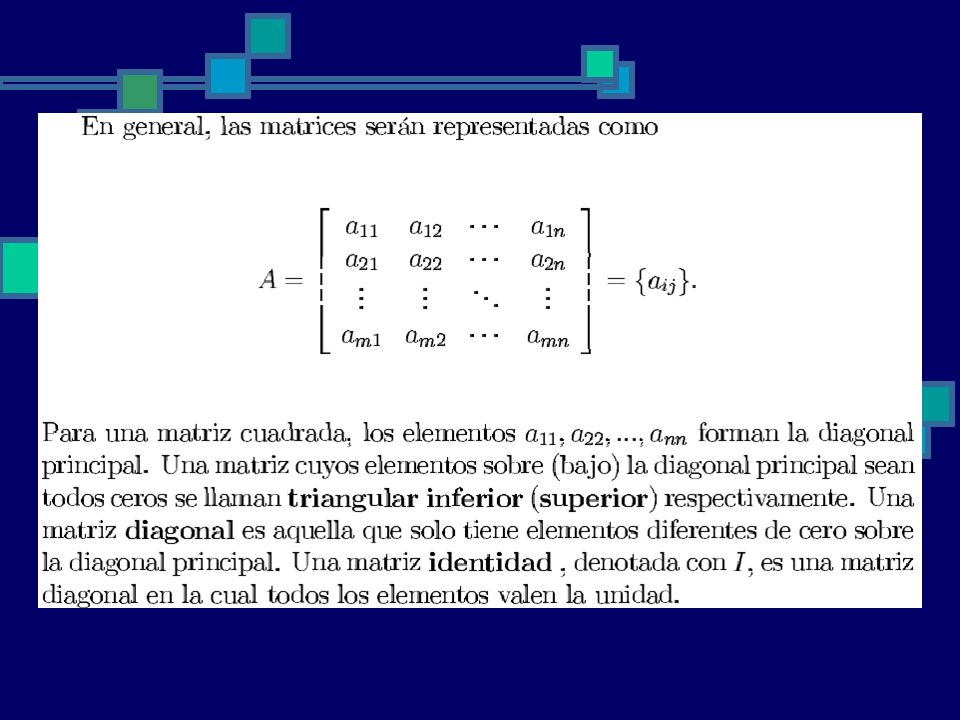
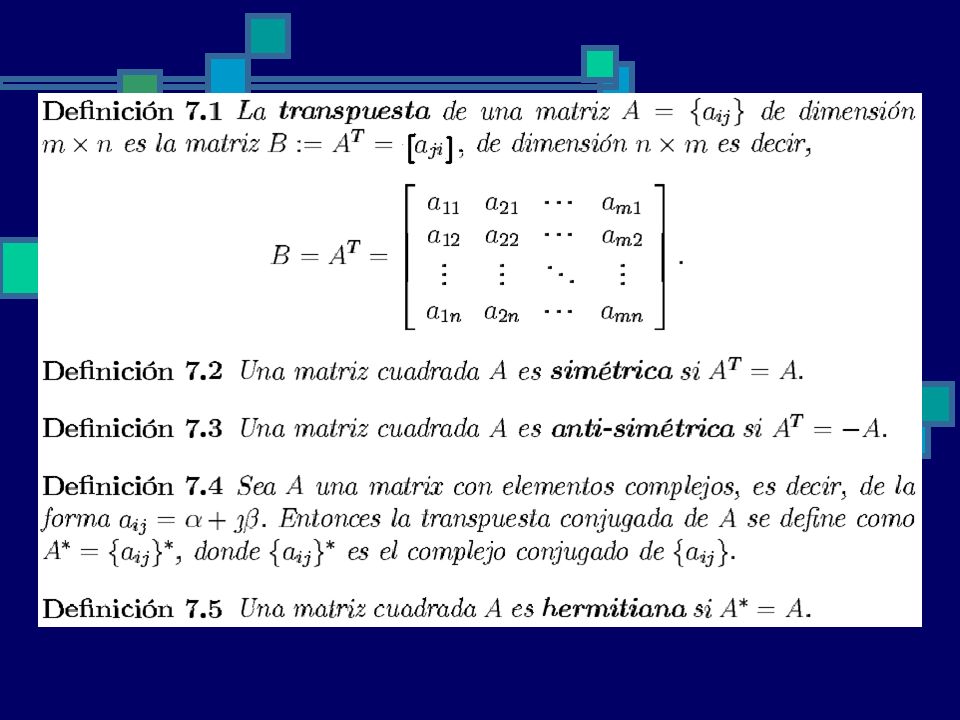
Temario Matemáticas I Programa: Algebra de matrices 1.1 Matrices
Matemáticas I Programa: Algebra de matrices 1.1 Matrices 1.2 Matrices especiales 1.3 Operaciones con matrices 1.4 Matrices por bloques

3
Temario Matemáticas I Programa: Sistemas de ecuaciones lineales
Matemáticas I Programa: Sistemas de ecuaciones lineales 2.1 Algoritmo de Gauss 2.2 Algoritmo de Gauss-Jordan 2.3 Existencia de soluciones 2.4 Operaciones elementales por filas y matrices elementales 2.5 Factorización LU 2.6 Geometría de ecuaciones lineales

4
Temario Matemáticas I Programa: Determinantes 3.1 Definición
Matemáticas I Programa: Determinantes 3.1 Definición 3.2 Propiedades 3.3 Determinantes e inversas 3.4 Regla de Cramer 3.5 Determinantes y matrices por bloques 3.6 Interpretación geométrica

5
Temario Matemáticas I Programa: Espacios vectoriales
Matemáticas I Programa: Espacios vectoriales Elementos de álgebra abstracta Grupos Todo sobre homomorfismos Anillos Campos 4.1 Espacios vectoriales 4.2 Subespacios vectoriales 4.3 Combinaciones lineales 4.4 Dependencia e independencia lineal 4.5 Base y dimensión 4.6 Kernel, imagen, espacio columna y espacio fila de una matriz 4.7 Ecuaciones lineales y espacios vectoriales 4.8 Cambio de base 4.9 Espacio cociente 4.10 Sumas y sumas directas

6
Temario Matemáticas I Programa:
Matemáticas I Programa: Espacios vectoriales con producto interno 5.1 Producto interno 5.2 Desigualdad de Cauchy-Schwarz 5.3 Ortogonalidad 5.4 Procedimiento de Gram-Schmidt 5.5 Espacios normados

7
Temario Matemáticas I Programa: Transformaciones lineales
Matemáticas I Programa: Transformaciones lineales 6.1 Definición 6.2 Propiedades 6.3 Kernel e imagen de una transformación lineal 6.4 Representación matricial de una transformación lineal 6.5 Isomorfismos 6.6 Operaciones con transformaciones lineales 6.7 Algebra de transformaciones lineales

8
Temario Matemáticas I Programa: Valores propios y vectores propios
Matemáticas I Programa: Valores propios y vectores propios 7.1 Definición y propiedades 7.2 Teorema de Cayley-Hamilton 7.3 Diagonalización de matrices

9
Temario Matemáticas I Programa: Formas canónicas
Matemáticas I Programa: Formas canónicas 8.1 Forma canónica de Jordan 8.2 Forma canónica racional Descomposición en valores singulares Pseudoinversa Funciones de matrices Matrices definidas positivas

10
Temario Matemáticas I Bibliografía
Matemáticas I Bibliografía · B. Noble, J.W. Daniel, “Applied linear algebra”, Prentice Hall. · S. Grossman, “Linear algebra”, McGraw Hill. · F.R. Gantmacher, “Matrix Theory”, Chelsea Publishing Co. · G. Strang, “Linear algebra and its applications”, Harcourt Brace Jovanovich Publishers. · S. Lipschutz, “Algebra lineal”, McGraw Hill.

11
Meta y objetivo Uso indiscriminado del álgebra lineal en el modo de pensar del ingeniero

12
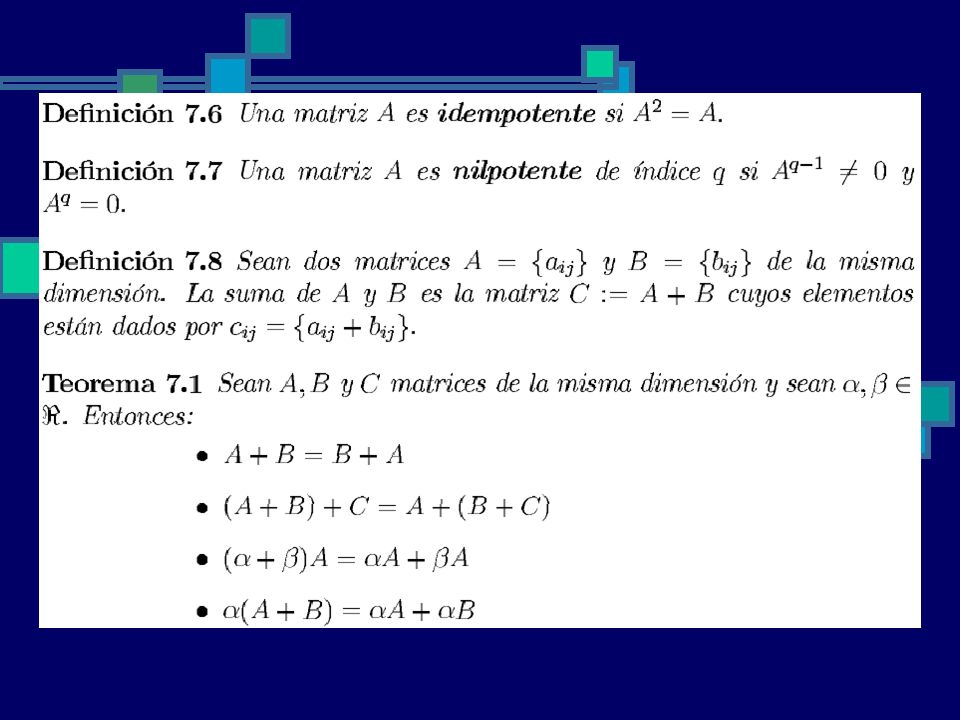
1. Algebra de Matrices 1.1 Matrices 1.2 Matrices especiales
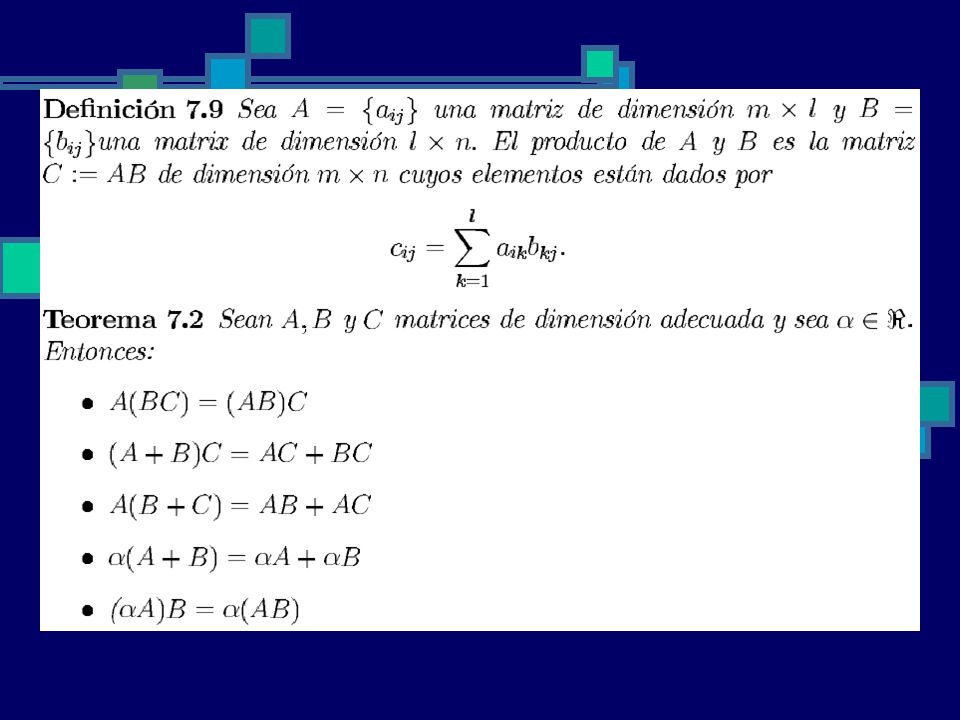
1.3 Operaciones con matrices 1.4 Matrices por bloques

19
Matrices por bloques a11 a12 a13 a14 a21 a22 a23 a24 a31 a32 a33 a34

20
Matrices por bloques A11 A12 A21 A22 B11 B21 A11B11+A12B21

21
En este momento… Ya sabemos operar con matrices

22
2. Sistemas de Ecuaciones
2.1 Algoritmo de Gauss 2.2 Algoritmo de Gauss-Jordan 2.3 Existencia de soluciones 2.4 Operaciones elementales por filas y matrices elementales 2.5 Factorización LU 2.6 Geometría de ecuaciones lineales

23
Sistema de ecuaciones lineales
a11x1+a12x2+...+a1nxn=b1 . an1x1+an2x2+...+annxn=bn

24
Sistema de ecuaciones lineales
2x1+3x2=2 x1+x2=3 x2=2/3-(2/3)x1 x2=3-x1 3-x1=2/3-(2/3)x1 3-2/3 =x1-(2/3)x1 2.333=0.333x1 x1=7 x2=-4
x1. x2=3-x1. 3-x1=2/3-(2/3)x1. 3-2/3 =x1-(2/3)x =0.333x1. x1=7. x2=-4.")
25
Sistema de ecuaciones lineales
2x1+3x2=2 x1+x2=3 x2=2/3-(2/3)x1 x2=3-x1 (7,-4)
x1. x2=3-x1. (7,-4)")
26
Algoritmo de Gauss 2x1+3x2=2 x1+x2=3 2 3 1 x1 x2 2 3 =

27
Algoritmo de Gauss 2 3 1 x1 x2 2 3 1/2 1 2 3 1 x1 x2 1/2 1 2 3 = = 1
1 2 3 1 x1 x2 1/2 1 2 3 = = 1 -1 1 1.5 x1 x2 1 -1 1 3 = 1 -2 1 1.5 -.5 x1 x2 1 -2 1 2 = 1 -1.5 1 1.5 x1 x2 1 -1.5 1 -4 =

28
Algoritmo de Gauss 1 x1 x2 7 -4 = 1 -1.5 1 -2 1 -1 1/2 1 -1 3 1 -2 =
x1 x2 7 -4 = 1 -1.5 1 -2 1 -1 1/2 1 -1 3 1 -2 = -1 3 1 -2 2 3 1 1 = Inversa Original

29
Notas Si el sistema tiene soluciones Consistente
Si el sistema no tiene soluciones Inconsistente Cada ecuación es la ecuación de una recta. Si todas las rectas se intersectan en al menos un punto, el sistema es consistente, caso contrario es inconsistente Operaciones elementales multiplicar un renglón por una constante diferente de cero; intercambiar renglones; sumar un múltiplo de un renglón a otro renglón Definición. Se dice que una matriz de n*n es una matriz elemental si es posible obtenerla a partir de la matriz identidad In de n*n mediante una sola operación elemental en los renglones

30
Notas En el método de Gauss sólo se utilizaron matrices elementales

31
Inversa de una matriz 2 3 1 x1 x2 2 3 = -1 3 1 -2 2 3 1 x1 x2 -1 3 1
Si se tiene la inversa ...

32
Inversa de una matriz La inversa de una matriz cuadrada A se define como la matriz B que: AB=BA=I y se denota como A-1 Teorema. Si B Y C son invesras de A, entonces B=C Demo. BA=I (BA)C=IC (BA)C=B(AC)=BI=B=C
C=IC (BA)C=B(AC)=BI=B=C.")
33
Inversa de una matriz Teorema. Si A y B tienen inversa y son del mismo tamaño, entonces AB tiene inversa (AB)-1=B-1A-1 Demo Demostrar que: (AB)(B-1A-1)=(B-1A-1)(AB)=I (AB)(B-1A-1)=A(BB-1)A-1=AIA-1=I (B-1A-1)(AB)=B-1(AA-1)B=I
-1=B-1A-1. Demo. Demostrar que: (AB)(B-1A-1)=(B-1A-1)(AB)=I. (AB)(B-1A-1)=A(BB-1)A-1=AIA-1=I. (B-1A-1)(AB)=B-1(AA-1)B=I.")
34
Inversa de una matriz Notar que una matriz elemental tiene inversa. Esto es cierto ya que es una operación elemental por la matriz identidad. Definición. Si A=E1E2...EnB con Ei elementales, entonces A es equivalente a B por renglones Teorema. Si A es una matriz cuadrada, entonces las siguientes afirmaciones son ciertas: a) A tiene inversa b) AX=0 únicamente tiene la solución trivial c) A es equivalente por renglones a I
 A tiene inversa. b) AX=0 únicamente tiene la solución trivial. c) A es equivalente por renglones a I.")
35
Inversa de una matriz Demo a) b)
Si A tiene inversa AX=0 A-1AX=A-10=0 X=0 es la única solución b) c) AX=0, donde la única solución es X=0 se puede llevar por Gauss a la forma IX=0, pero para llevar a esta forma se tienen que utilizar matrices elementales, i.e. EnEn-1...E1A=I, como las Ei tienen inversa, entonces E1-1E2-1...En-1I=A c) a) Como A es quivalente a I, entonces E1-1E2-1...En-1I=A, y por tanto A-1= EnEn-1...E1I
 c) AX=0, donde la única solución es X=0 se puede llevar por Gauss a la forma IX=0, pero para llevar a esta forma se tienen que utilizar matrices elementales, i.e. EnEn-1...E1A=I, como las Ei tienen inversa, entonces. E1-1E2-1...En-1I=A. c) a) Como A es quivalente a I, entonces E1-1E2-1...En-1I=A, y por tanto. A-1= EnEn-1...E1I.")
36
En este momento… Ya resolvemos sistemas de ecuaciones y conocemos cosas de la inversa.

37
3. Determinantes Determinantes 3.1 Definición 3.2 Propiedades
3.3 Determinantes e inversas 3.4 Regla de Cramer 3.5 Determinantes y matrices por bloques 3.6 Interpretación geométrica

38
Permutaciones Conjunto n={1,2,...,n}, el conjunto de las permutaciones de n es Sn. Una permutación Sn se escribe como 1 2 3 4 (1) (2) (3) (4)
 (2) (3) (4)")
39
Composición 1 2 3 4 1 2 3 4 = = 1 2 3 4 1 2 3 4 = =

40
Inversas 1 2 3 4 2 3 4 1 = -1= 1 2 3 4 -1=

41
Transposición 1 2 3 4 = Todos permanecen iguales, excepto dos que se intercambiaron

42
Ciclos 1 2 3 4 5 6 = =(1 4) ( ) (1)=4, (4)=1 -- (2)=6, (6)=5, (5)=3, (3)=2 Toda permutación se puede escribir como el producto de ciclos

43
Ciclos Chequen lo siguiente. Todo ciclo se puede escribir como un producto de transposiciones ejemplo ( )=(2 1)(3 1)(5 1)(4 1) No es única, pero todas las representaciones son pares o impares en el número de transposiciones una permutación es par o impar. Definición. El signo de una permutación es (+) 1 si es par (-1) si es impar
 1 si es par (-1) si es impar.")
44
Determinante A=[aij] de n*n, el determinante de A se define como:
Det(A)= a1(1)a2(2)...an(n)
![Determinante A=[aij] de n*n, el determinante de A se define como:](http://slideplayer.es/slide/32096/1/images/44/Determinante+A%3D%5Baij%5D+de+n%2An%2C+el+determinante+de+A+se+define+como%3A.jpg "Det(A)= a1(1)a2(2)...an(n)")
45
Determinante Ejemplo. Sea A una matriz de 3*3, entonces S3 tiene 6 elementos (3!) 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 Las permutaciones de arriba son pares, las de abajo impares. Det(A)=a11a22a33+a12a23a31+a13a21a32-a12a21a33-a13a22a31-a11a23a32
=a11a22a33+a12a23a31+a13a21a32-a12a21a33-a13a22a31-a11a23a32.")
46
Propiedades R1 … Ri+Rj Rn

47
En este momento… Entendemos lo que es el determinante

48
4. Espacios vectoriales

49
Espacios vectoriales Elementos de álgebra abstracta Grupos Anillos
Todo sobre homomorfismos Anillos Campos

50
Algebra abstracta Grupo: G(S,+) S Conjunto de elementos
+ Operación binaria a+b=c, a,b,c S Existe e S, a+e=e+a=a Existe a-1 S a-1+a=e

51
¿Es grupo? ¿Los naturales con +, *? ¿Z4, +?, ¿Z4, *?
¿Los reales con +, *? ¿Los racionales con +, *?

52
Homomorfismos Dos grupos (S1,+), (S2,*) H:S1S2 H(a+b)=H(a)*H(b)
H(e1+e1)=H(e1)+H(e1)= H(e1)= e2 *H(e1) H(e1)*[H(e1)-1]= e2 *H(e1)* H(e1)-1=e2 H(e1)= e2
=H(e1)+H(e1)= H(e1)= e2 *H(e1) H(e1)*[H(e1)-1]= e2 *H(e1)* H(e1)-1=e2. H(e1)= e2.")
53
Propiedad H(x-1)=[H(x)]-1 H(x)+ H(x-1)=H(x+x-1)=H(e1)=e2
![Propiedad H(x-1)=[H(x)]-1 H(x)+ H(x-1)=H(x+x-1)=H(e1)=e2](http://slideplayer.es/slide/32096/1/images/53/Propiedad+H%28x-1%29%3D%5BH%28x%29%5D-1+H%28x%29%2B+H%28x-1%29%3DH%28x%2Bx-1%29%3DH%28e1%29%3De2.jpg "Propiedad H(x-1)=[H(x)]-1 H(x)+ H(x-1)=H(x+x-1)=H(e1)=e2")
54
Imagen Im(H)={y|H(a)=y, aS1} Son elementos de S2
={y|H(a)=y, aS1} Son elementos de S2")
55
Kernel Ker(H)={x|H(x)=e1} son elementos de S1
={x|H(x)=e1} son elementos de S1")
56
El kernel es una medida de la inyectividad de la función
Suponer que H(x)=H(y) H(x)+[H(y)]-1=e2 H(x+y-1)=e2 si y-1≠x-1 hay más de un elemento en el kernel de H y por lo tanto no es inyectiva H.
=H(y) H(x)+[H(y)]-1=e2 H(x+y-1)=e2. si y-1≠x-1. hay más de un elemento en el kernel de H y por lo tanto no es inyectiva H.")
57
La imagen es grupo Sean a,b Im(H).
a+b=H(x)+H(y)=H(x+y) a+b también está en la imagen de H. H(e1)=e2 la identidad está en la imagen Si a está en Im(H) H(x)=a H(x-1) es el inverso de a.
+H(y)=H(x+y) a+b también está en la imagen de H. H(e1)=e2 la identidad está en la imagen. Si a está en Im(H) H(x)=a H(x-1) es el inverso de a.")
58
El kernel es grupo Sean a,b Ker(H).
a+b=H(a)+H(b)=e2+e2 H(a+b)=e2 a+b también está en el kernel de H. H(e1)=e2 la identidad está en el kernel Si a está en Ker(H) H(a)=e2 H(a+a-1)=H(a)+H(a-1)=e2+e2 a-1 está en el kernel
+H(b)=e2+e2 H(a+b)=e2. a+b también está en el kernel de H. H(e1)=e2 la identidad está en el kernel. Si a está en Ker(H) H(a)=e2 H(a+a-1)=H(a)+H(a-1)=e2+e2 a-1 está en el kernel.")
59
Subgrupos Si G=(S,+) es un grupo, entonces H=(R,+) es un subgrupo de G ssi H=(R,+) tiene las características de un grupo. R es un subconjunto de S

60
Coconjuntos Si H=(R,+) es un subgrupo de G entonces para todo a elemento de G, el conjunto aH es llamado el coconjunto izquierdo de a debido a H.
 es un subgrupo de G entonces para todo a elemento de G, el conjunto aH es llamado el coconjunto izquierdo de a debido a H.")
61
Coconjuntos El conjunto de todos los coconjuntos de un grupo G debido a un grupo H es llamado el grupo cociente G/H debido a que tiene las propiedades de un grupo Cada coconjunto de G/H es denotado como [a] (el elemento que le dió origen, H está fijo)
")
62
Coconjuntos Lo primero que hay que notar es que se puede establecer la siguiente relación de equivalencia a~b ssi a-1+b pertenece a H a~a a está en aH, a-1+a=e, como en H está la identidad, entonces en aH está a

63
Coconjuntos Si a~b entonces b~a a-1+b está en H (a-1+b)-1 está en H
b-1+a está en H Además b está en aH a-1+b está en H y e está en H y a está en aH a-1+b=h a+a-1+b=a+h b=a+h, i.e. es un elemento de aH

64
Coconjuntos Si a~b y b~c entonces a~c a está en H
a-1b, b-1cH a-1c H Además c está en aH, Claro…

65
Coconjuntos Como vemos, la relación anterior particiona el conjunto S del grupo G=(S,+). A su vez, cada partición es igual a un coconjunto de G/H, entonces los coconjuntos particionan a G/H si b aH existe x H, tal que ax=b aH a-1ax=a-1b=x H

66
Recordatorio TEOREMA. Sea L una partición del conjunto X. Defínase xRy si x, yS para algún S L. Entonces R es reflexiva, simétrica y transitiva.

67
Recordatorio Demo. Sea x X. Como X = L, x S para algún S L. Entonces xRx y R es reflexiva. Sup. xRy. Entonces x e y pertenecen a un S L. Como y y x pertenecen a S, yRx R es simétrica. Sup. xRy e yRx entonces x, y S L. y, z T L. Si S T yS zT pero L es disjunta por pares no es posible; entonces S = T x y z S xRz; R es transitiva.

68
Recordatorio TEOREMA. Sea R una relación de equivalencia sobre un conjunto X. Para cada a X, sea [a] = {x XxRa} entonces L = {[a] a X} es una partición de X Demo Para verificar que L es una partición de X i) X = L ii) L es una familia disjunta por pares
 X = L. ii) L es una familia disjunta por pares.")
69
Recordatorio Sea a X; como aRa a [a]; entonces X = L
> Dem que si aRb [a] = [b] - Sup aRb. Sea x [a], entonces xRa. Como aRb y R es transitiva xRb. x [b] y [a] [b]. - Sup bRa. Sea x [b], entonces xRb. Como bRa y R es transitiva, xRa. x [a] y [b] [a] > Sup [a], [b] L con [a] [b]. Probar [a] [b] = . - Sup para algún x, x [a] [b], entonces xRa y xRb, entonces [x]=[a] y [x]=[b]; consecuentemente [a]= [b]: contradicción [a] [b] = y L es disjunta por pares.
![Recordatorio Sea a X; como aRa a [a]; entonces X = L](http://slideplayer.es/slide/32096/1/images/69/Recordatorio+Sea+a+%EF%83%8E+X%3B+como+aRa+%EF%82%AE+a+%EF%83%8E+%5Ba%5D%3B+entonces+X+%3D+L.jpg "> Dem que si aRb [a] = [b] - Sup aRb. Sea x [a], entonces xRa. Como aRb y R es transitiva xRb. x [b] y [a] [b]. - Sup bRa. Sea x [b], entonces xRb. Como bRa y R es transitiva, xRa. x [a] y [b] [a] > Sup [a], [b] L con [a] [b]. Probar [a] [b] = . - Sup para algún x, x [a] [b], entonces xRa y xRb, entonces [x]=[a] y [x]=[b]; consecuentemente [a]= [b]: contradicción [a] [b] = y L es disjunta por pares.")
70
Grupos En el grupo G/H el elemento [e] funciona como la identidad.
[e]+[a]=[a]+[e]=[a] al menos el elemento e+a está en la suma, pero este elemento está en [a] El inverso de [a] es [a-1], al sumar a+a-1 se genera el elemento e y por tanto [e] Además es cerrado
![Grupos En el grupo G/H el elemento [e] funciona como la identidad.](http://slideplayer.es/slide/32096/1/images/70/Grupos+En+el+grupo+G%2FH+el+elemento+%5Be%5D+funciona+como+la+identidad..jpg "[e]+[a]=[a]+[e]=[a] al menos el elemento e+a está en la suma, pero este elemento está en [a] El inverso de [a] es [a-1], al sumar a+a-1 se genera el elemento e y por tanto [e] Además es cerrado.")
71
Sean X y Y dos conjuntos cualesquiera. Sea A:XY una función cualquiera. Entonces se puede definir la relación Ker A de la siguiente forma: x1~x2 ssi A(x1)=A(x2) Note que la relación Ker A es una relación de equivalencia. Como es una relación de equivalencia, entonces diremos que x1x2 (mod Ker A) –x1 es equivalente a x2 módulo Ker A- -También se dice que x1 es congruente a x2 vía Ker A o que la relación Ker A es una congruencia-
=A(x2) Note que la relación Ker A es una relación de equivalencia. Como es una relación de equivalencia, entonces diremos que x1x2 (mod Ker A) –x1 es equivalente a x2 módulo Ker A- -También se dice que x1 es congruente a x2 vía Ker A o que la relación Ker A es una congruencia-")
72
Significado geométrico de esta relación
X Y clusters y1 x1 x2 x3 y2 x4 y3 x5 y4 x6 Imagen de A Observe que hay tantos clusters como imágenes de A Podemos hacer el conjunto de los clusters

73
Significado geométrico de esta relación
clusters A este conjunto lo llamaremos X/Ker A, o conjunto cociente X/Ker A c1={x1, x2, x3} c2={x4} c3={x5, x6} (A menudo yo le llamo conjunto de clustercillos)
")
74
Significado geométrico de esta relación
X/Ker A Noten que la relación Ker A está dando una medida de la inyectividad de A. Si el número de clusters es igual al número de elementos en X, entonces A es inyectiva. c1={x1, x2, x3} c2={x4} c3={x5, x6} A los clusters se les llama coconjuntos (cosets) y son justamente los subconjuntos de X sobre los cuales A tiene diferente valor. También se les suele llamar las “fibras” de A.
 y son justamente los subconjuntos de X sobre los cuales A tiene diferente valor. También se les suele llamar las fibras de A.")
75
Significado geométrico de esta relación
Ejem. A(x)=x módulo 4 -es el residuo de la división, no la congruencia X 3 7 Aquí está A 2 6 Y X/Ker A c2=[1 5 9] 1 3 c1=[0 4 8] c4=[3 7] c3=[2 6] 2 Como X/Ker A y la imagen de A tienen la misma cantidad de elementos, entoces hay un isomorfismo entre X/Ker A y Im(A) [X/Ker AIm(A)]
=x módulo 4 -es el residuo de la división, no la congruencia. X Aquí está A Y. X/Ker A. c2=[1 5 9] c1=[0 4 8] c4=[3 7] c3=[2 6] 2. Como X/Ker A y la imagen de A tienen la misma cantidad de elementos, entoces hay un isomorfismo entre X/Ker A y Im(A) [X/Ker AIm(A)]")
76
Significado geométrico de esta relación
Proposición. Sea A:XY y sea PA:XX/Ker A su proyección canónica, entonces g:X/ker Aim(A) tal que A=gPA, donde g es una biyección. X 3 7 Aquí está A 2 6 PA Y X/Ker A c2=[1 5 9] 1 3 c1=[0 4 8] c4=[3 7] c3=[2 6] 2
 tal que A=gPA, donde g es una biyección. X Aquí está A PA. Y. X/Ker A. c2=[1 5 9] c1=[0 4 8] c4=[3 7] c3=[2 6] 2.")
77
Demostración Definir g(z)=A(x) ssi z=PA(x). Se afirma que g(z) es función Cubre todo X. Como A es función, entonces a cubre todo X, y por la definición anterior, g también cubrirá todo X Un valor de X/Ker A no está asociado a dos valores de Y. Suponer que si es así, (z,y1), (z,y2)g. Entonces y1y2. Por la definición de g se tiene: z= PA(x1), y1=A(x1) y además z= PA(x2), y2=A(x2) Como PA(x1),= PA(x2) implica que A(x1)= A(x2) Entonces y1=y2, una contradicción, entonces Un valor de X/Ker A no está asociado a dos valores de Y Por tanto g(z) si es función.
, (z,y2)g. Entonces y1y2. Por la definición de g se tiene: z= PA(x1), y1=A(x1) y además. z= PA(x2), y2=A(x2) Como PA(x1),= PA(x2) implica que A(x1)= A(x2) Entonces y1=y2, una contradicción, entonces. Un valor de X/Ker A no está asociado a dos valores de Y. Por tanto g(z) si es función.")
78
Demostración Ahora veremos que g es una biyección.
g es inyectiva. Suponer que no es así, i.e. (z,y),(z’,y)g Entonces zz’ Entonces z=PA(x) y z’=PA(x’) Además A(x)=A(x’)=y. Como tienen la misma y, entonces PA(x)=PA(x’), una contradicción. Por tanto es inyectiva. g es sobre. Como g:X/Ker AIm(A), sólo abarca las imágenes de A. Por definición de g, cualquier imagen de A tiene una preimagen en X/Ker A. Por lo tanto g es sobre. Como es inyectiva y sobre, es una biyección.
,(z’,y)g. Entonces zz’ Entonces z=PA(x) y z’=PA(x’) Además A(x)=A(x’)=y. Como tienen la misma y, entonces PA(x)=PA(x’), una contradicción. Por tanto es inyectiva. g es sobre. Como g:X/Ker AIm(A), sólo abarca las imágenes de A. Por definición de g, cualquier imagen de A tiene una preimagen en X/Ker A. Por lo tanto g es sobre. Como es inyectiva y sobre, es una biyección.")
79
Demostración Por definición A=goPA

80
Significado geométrico de esta relación
,... Y ahora Definición. Se dice que una relación R1 refina (es más fina) a R2 y se escribe R1R2 si (x,y)R1 entonces (x,y)R2. En otras palabras, todo coconjunto de R1 es un subconjunto de algún coconjunto de R2. 3 7 3 7 2 6 2 6
 a R2 y se escribe R1R2 si (x,y)R1 entonces (x,y)R2. En otras palabras, todo coconjunto de R1 es un subconjunto de algún coconjunto de R")
81
Significado geométrico de esta relación
Ahora se generalizarán estos conceptos Proposición. Sea f:XY y sea una partición del conjunto X, donde Ker f . Entonces existe un único mapa g:X/Y tal que f=gP. En pocas palabras, dice que si existe una partición más fina que la que deja la función, entonces es posible recuperar la informa- ción de la función vía la partición más fina (que en este caso se llama ).
.")
82
Significado geométrico de esta relación
X Aquí está f 3 7 2 6 Y Aquí está Ker f (son los círculos que forman las clases de equivalencia) 1
 1.")
83
Significado geométrico de esta relación
X Aquí está f 3 7 2 6 Y Aquí está (son los rectángulos que forman las clases de equivalencia), Se puede ver que Ker f 1
, Se puede ver que Ker f 1.")
84
Significado geométrico de esta relación
X Aquí está f 3 7 Aquí está Pf 2 6 Y e1=[ ] e2=[ ] 1

85
Significado geométrico de esta relación
X Aquí está f 3 7 Aquí está Pf 2 6 Y e1=[ ] e2=[ ] 1 e2=[1 5 9] Aquí está P e1=[0 4 8] e4=[3 7] e3=[2 6]

86
Significado geométrico de esta relación
X Aquí está f 3 7 Aquí está Pf 2 6 Y e1=[ ] e2=[ ] 1 e2=[1 5 9] Aquí está P e1=[0 4 8] e4=[3 7] Aquí está g e3=[2 6]

87
Demostración Significado geométrico de esta relación
Definir g(z)=f(x) ssi z=P(x). Además para cada zk={xi|xiAi} existe una clase [xi]={xi|f(xi)=y} donde zk[xi] como Ker f, entonces [xi] puede ser particionado en z1,...,zn g es una función. Como zk pertenece a algún [xi], entonces este g(zk) será igual a f(xi), o sea todo elemento de X/ será asociado con un valor en Y. X/ está cubierto. Si (zk,yi), (zk,yj)g, implica que zk[xi] y zk[xj], pero por 2) esto no es cierto, por lo tanto cada zk se asocia con uno y sólo un valor de Y.
=f(x) ssi z=P(x). Además para cada zk={xi|xiAi} existe una clase [xi]={xi|f(xi)=y} donde zk[xi] como Ker f, entonces [xi] puede ser particionado en z1,...,zn. g es una función. Como zk pertenece a algún [xi], entonces este g(zk) será igual a f(xi), o sea todo elemento de X/ será asociado con un valor en Y. X/ está cubierto. Si (zk,yi), (zk,yj)g, implica que zk[xi] y zk[xj], pero por 2) esto no es cierto, por lo tanto cada zk se asocia con uno y sólo un valor de Y.")
88
Demostración Significado geométrico de esta relación
Por la definición de g, se tiene que f(x)=g P(x) Suponer que existe g’(z) tal que f=g’P Sea xX g’(P(x)) =f(x)= g(P(x)) entonces g’=g.
=g P(x) Suponer que existe g’(z) tal que f=g’P Sea xX g’(P(x)) =f(x)= g(P(x)) entonces g’=g.")
89
Significado geométrico de esta relación
Proposición. Sea f:XY y g:XZ y sea Ker fKer g. Entonces existe un mapa h:ZY tal que f=hg. Más aún, h está solamente definida en la imagen de g; esto es la restricción h|g(X). Intuitivamente dice que la imagen de g deja suficiente información para poder relacionar cada elemento de Z con uno y sólo uno de Y.
. Intuitivamente dice que la imagen de g deja suficiente información. para poder relacionar cada elemento de Z con uno y sólo uno de Y.")
90
Significado geométrico de esta relación
X Aquí está f 3 7 Y 2 6 1 Aquí está Pf Hay una función isomórfica e2 e1 X/Ker f

91
Significado geométrico de esta relación
X Aquí está g 3 7 Z 2 6 1 3 Aquí está Pg 2 Hay una función isomórfica e1 e3 e2 X/Ker g e4

92
Significado geométrico de esta relación
X 3 7 2 6 El Ker f Ker g

93
Significado geométrico de esta relación
X Aquí está f Aquí está g 3 7 Y Z 2 6 1 1 3 2 Aquí está h e2 e1 e3 e1 e2 e4 X/Ker g X/Ker f

94
Demostración Significado geométrico de esta relación
h(z)=f(x) ssi z=g(x) [xi]={xi|f(xi)=y}; como Ker fKer g implica que [xi] puede ser particionado en z1,...,zn tal que g(xi) =zi y por tanto h(zi)=y. Por la definición, h está definida en la imagen de g. Como en el caso anterior h asigna a cada zi un único valor en Y. Por la definición de h se tiene que h(g(x)=f(x). Se ve que se cumple, ya que como Ker fKer g, un xg-1(zi) xf-1(y)
=f(x) ssi z=g(x) [xi]={xi|f(xi)=y}; como Ker fKer g implica que [xi] puede ser particionado en z1,...,zn tal que g(xi) =zi y por tanto h(zi)=y. Por la definición, h está definida en la imagen de g. Como en el caso anterior h asigna a cada zi un único valor en Y. Por la definición de h se tiene que h(g(x)=f(x). Se ve que se cumple, ya que como Ker fKer g, un xg-1(zi) xf-1(y)")
95
Demostración Significado geométrico de esta relación
Suponer que existe h’(z) tal que f=h’g Sea xX h’(g(x)) =f(x)= h(g(x)) entonces h’=h.
 tal que f=h’g. Sea xX h’(g(x)) =f(x)= h(g(x)) entonces h’=h.")
96
Significado geométrico de esta relación
Proposición. Si , son dos particiones tal que , entonces existe una única función f:X/X/ tal que P=fP.

97
Significado geométrico de esta relación
X 3 7 2 6 X X 3 7 3 7 2 6 2 6 La partición La partición

98
Significado geométrico de esta relación
X 3 7 2 6 Aquí está P Aquí está P X/ X/ e2 e2 e1 e1 e4 e3

99
Significado geométrico de esta relación
X 3 7 2 6 Aquí está P Aquí está P X/ X/ e2 e2 e1 e1 e4 e3 Aquí está f

100
Congruencias de sistemas dinámicos
Un sistema dinámico sobre un conjunto X es un mapa :XX con la siguiente interpretación. Los elementos xX son llamados estados y es llamada función de transición de estados. k es la k-ésima composición de ’s

101
Congruencias de sistemas dinámicos
Sea una partición de X con proyección canónica P :XX/ . es una congruencia para si existe un mapa ’: X/ X/ tal que: ’ P = P X X P P ’ X/Ker X/Ker

102
Congruencias de sistemas dinámicos
Recordando resultados previos es una congruencia de ssi Ker P Ker (P ) X X P P ’ X/Ker X/Ker
 X. X. P P ’ X/Ker X/Ker ")
103
Anillos Un anillo R=(S,+,*) es un conjunto con dos operaciones binarias. (S,+) es un grupo conmutativo (grupo abeliano) (S,*) es un semigrupo (se le pide cerrado, pero no unidad ni inversas)
 es un semigrupo (se le pide cerrado, pero no unidad ni inversas)")
104
Anillos En un anillo se deben cumplir las propiedades distributivas
a*(b+a)=a*b+a*c (b+c)*a=b*a+c*a
=a*b+a*c. (b+c)*a=b*a+c*a.")
105
Anillos En un anillo elemento identidad de (S,+) será denotado como 0.
Si (S,*) forma un grupo para sus elementos no 0, es llamado anillo de división.
 forma un grupo para sus elementos no 0, es llamado anillo de división.")
106
Anillos Un anillo de división, (S,*) si es conmutativo será llamado Campo
 si es conmutativo será llamado Campo")
107
Anillos Por ser anillo se tiene a0=0a=0 a(-b)=-(ab)=(-a)b a(b-c)=ab-ac
a0=a(0+0)=a0+a0 a0+(-(a0))=a00=a0 a(-b)=-(ab)=(-a)b 0=a0=a(b+(-b))=ab+a(-b) -ab=a(-b) a(b-c)=ab-ac a(b-c)=a(b+(-c))=ab+a(-c)=ab-ac
=a0+a0. a0+(-(a0))=a00=a0. a(-b)=-(ab)=(-a)b. 0=a0=a(b+(-b))=ab+a(-b) -ab=a(-b) a(b-c)=ab-ac. a(b-c)=a(b+(-c))=ab+a(-c)=ab-ac.")
108
Espacios vectoriales Espacios vectoriales Subespacios vectoriales
Combinaciones lineales Dependencia e independencia lineal Base y dimensión

109
Espacios vectoriales Un espacio vectorial E=(V,F)
Es un conjunto de elementos llamados vectores sobre un campo F donde x+y=y+x y pertenece a V x+(y+z)=(x+y)+z Existe el vector 0, tal que 0+x=x+0=x Para cada vector x existe el –x, tal que x-x=0
=(x+y)+z. Existe el vector 0, tal que 0+x=x+0=x. Para cada vector x existe el –x, tal que x-x=0.")
110
Espacios vectoriales Cada elemento dol campo es llamado un escalar
µ(x+y)= µx+µy µx= xµ (µ1+ µ2)x= µ1(x)+ µ2(y) 1x=x 1 la unidad multiplicativa del campo
= µx+µy. µx= xµ. (µ1+ µ2)x= µ1(x)+ µ2(y) 1x=x 1 la unidad multiplicativa del campo.")
111
Espacios vectoriales ejemplos

112
Espacios vectoriales Teorema 0v=v0=0 (-1)v=-v
0v=0v+0v-0v=(0+0)v-0v=0v-0v=0 (-1)v=-v v+(-1)v=1v+(-1)v=(1-1)v=0v=0 Agregando –v a ambos lados se tiene el resultado
v-0v=0v-0v=0. (-1)v=-v. v+(-1)v=1v+(-1)v=(1-1)v=0v=0. Agregando –v a ambos lados se tiene el resultado.")
113
Subespacio Sea (V,F) un espacio, entonces (S,F) es un subespacio de (V,F) si preserva todas las características de espacio y S es un subconjunto de V
 un espacio, entonces (S,F) es un subespacio de (V,F) si preserva todas las características de espacio y S es un subconjunto de V.")
114
Subespacio ejemplos

115
Creación de espacios Teorema. Demo en clase por los alumnos
Espacio vectorial (V,F) S subconjunto de V Si v1,…vn están en S, entonces también 1v1+…+nvn, donde i son elementos del campo (S,F) es un subespacio Demo en clase por los alumnos
 S subconjunto de V. Si v1,…vn están en S, entonces también 1v1+…+nvn, donde i son elementos del campo. (S,F) es un subespacio. Demo en clase por los alumnos.")
116
Creación de espacios Preguntas importantes
¿En qué condiciones dos conjuntos S1, S2 crean el mismo espacio vectorial? ¿Cúal es la cardinalidad mínima de QS tal que Q y S crean el mismo espacio vectorial? ¿Cúando S crea el mismo espacio que contiene a los vectores de S?

117
Dependencia e independencia lineal
Definición. Sea S={v1,v2,...vn} un conjunto de vectores. El vector y=1v1+2v2+...+nvn donde los coeficientes son escalares será llamada combinación lineal de S.

118
Dependencia e independencia lineal
Definición. Sea S={v1,v2,...vn} un conjunto de vectores. S es linealmente independiente si 1v1+2v2+...+nvn=0 tiene como única solución la trivial. De lo contrario se llamarán linealmente dependientes.

119
Dependencia e independencia lineal
Definición. Sea S={v1,v2,...vn} un conjunto de vectores. Si S es linealmente independiente, entonces el espacio creado por S será llamado espacio generado por S.

120
Dependencia e independencia lineal
Sea S={v1,v2,...vn} un conjunto de vectores. Para mostrar si es linealmente independiente se resuelve la ecuación: [v1 v vn] =0 1 2 ... n

121
Dependencia e independencia lineal
Entonces ya podemos aplicar Gauss para resolver el sistema y ver su solución Si la matriz [v1 ...vn] es de rango n entonces tiene solución única Si la matriz [v1 ... vn] es de rango menor a n, entonces tiene más de una solución.

122
Dependencia e independencia lineal
Ejemplos en clase

123
Bases, Dimensión y coordenadas
Definición. Sea (V,F) un espacio vectorial, entonces el conjunto S={v1, v2, ...vn} será una base para (V,F) si S genera (V,F). S es linealmente independiente S genera (V,F)
 un espacio vectorial, entonces el conjunto S={v1, v2, ...vn} será una base para (V,F) si S genera (V,F). S es linealmente independiente. S genera (V,F)")
124
Bases, Dimensión y coordenadas
ejemplos de bases en diferentes espacios

125
Bases, Dimensión y coordenadas
Notita. Si z es una C.L. (combinación lineal) de los vectores x1,...,xr; y xi es una C.L. de los vectores y1,...,ys. Entonces z es una C.L. de los vectores y1,...,ys. z=a1x1+...+arxr z=a1(b11y1+...+b1sys)+...+ar(br1y1+...+brsys) Es una propiedad de transitividad
 de los vectores x1,...,xr; y xi es una C.L. de los vectores y1,...,ys. Entonces z es una C.L. de los vectores y1,...,ys. z=a1x1+...+arxr. z=a1(b11y1+...+b1sys)+...+ar(br1y1+...+brsys) Es una propiedad de transitividad.")
126
Bases, Dimensión y coordenadas
Notita. Si algunos vectores x1,...,xn son linealmente dependientes (L.D.) entonces todo el sistema x1,...,xn son L.D. Suponer que x1,...,xk (k<n) son L.D. a1x1+...+akxk=0 con ai diferente de nulo. a1x1+...+akxk+0xk xn=0 es solución y el sistema es L.D.
 entonces todo el sistema x1,...,xn son L.D. Suponer que x1,...,xk (k<n) son L.D. a1x1+...+akxk=0 con ai diferente de nulo. a1x1+...+akxk+0xk xn=0 es solución y el sistema es L.D.")
127
Bases, Dimensión y coordenadas
La base B={v1, ..., vn} es un conjunto, pero tiene un orden para facilitar trabajos futuros. Representación. Un vector v se puede reescribir en términos de una base. v=1v1+2v2+...+nvn, a donde 1 2 ... n Es la representación del vector

128
Bases, Dimensión y coordenadas
Ejemplos de representación de vectores

129
Bases, Dimensión y coordenadas
Teorema. La representación del vector es única v=1v1+2v2+...+nvn= 1’v1+2’v2+...+n’vn (1-1’)v (n-n’)vn=0 base L.I. entonces la única solución es cero (i-i)=0 i=i’
v (n-n’)vn=0. base L.I. entonces la única solución es cero (i-i)=0 i=i’")
130
Bases, Dimensión y coordenadas
Notita. El teorema anterior es cierto si dice que z=a1x1+...+akxk los ai son únicos ssi los xi son L.I.

131
Bases, Dimensión y coordenadas
Definición. Sea (V,F) un espacio vectorial. Dos subespacios de (V,F); (V1,F) y (V2,F) se dicen equivalentes si los vectores de uno se pueden escribir como C.L. del otro y viceversa.
 un espacio vectorial. Dos subespacios de (V,F); (V1,F) y (V2,F) se dicen equivalentes si los vectores de uno se pueden escribir como C.L. del otro y viceversa.")
132
Bases, Dimensión y coordenadas
Teorema. Suponer que B={v1, ...,vp} es una base para (V,F) y suponer que D={u1,...,uq} es un subconjunto L.I. en (V,F), entonces qp Demostración. Como B es una base, entonces uiD,(V,F) se puede expresar como una C.L. de B
 y suponer que D={u1,...,uq} es un subconjunto L.I. en (V,F), entonces qp. Demostración. Como B es una base, entonces uiD,(V,F) se puede expresar como una C.L. de B ")
133
Bases, Dimensión y coordenadas
S1={u1,e1,...,ep} es L.I. Existe un vector que es C.L. de los anteriores, digamos que es ei. Por transitividad el resto {u2,...,uq} es una C.L. de S1-{ei} y se puede aplicar el mismo procedimiento Como se observa el procedimiento no puede eliminar todos los vp vectores antes de que los ui vectores se hayan agotado y qp.

134
Bases, Dimensión y coordenadas
Teorema. Número de vectores en la base. Suponer que para un espacio (V,F) se tiene una base con p vectores. Entonces todas las bases tienen p vectores. Demo. Aplicar teorema anterior suponiendo que se tiene otra base con q vectores. qp. Aplicar partiendo de la base con q vectores pq q=p.
 se tiene una base con p vectores. Entonces todas las bases tienen p vectores. Demo. Aplicar teorema anterior suponiendo que se tiene otra base con q vectores. qp. Aplicar partiendo de la base con q vectores pq q=p.")
135
Bases, Dimensión y coordenadas
Definición. Al número de vectores en la base de un espacio (V,F) se le llama dimensión de (V,F). En especial, todos los subespacios equivalentes también tienen un conjunto de vectores que lo generan (ya que son un espacio en sí) y se tiene una base y por tanto también tienen su dimensión. En tal caso es más adecuado hablar de rango que de dimensión, ya que podemos hablar de un subespacio en R3, pero de rango 2. A su vez, a la dimensión del espacio completo se le puede llamar rango, pero es mejor hablar de dimensión.
 se le llama dimensión de (V,F). En especial, todos los subespacios equivalentes también tienen un conjunto de vectores que lo generan (ya que son un espacio en sí) y se tiene una base y por tanto también tienen su dimensión. En tal caso es más adecuado hablar de rango que de dimensión, ya que podemos hablar de un subespacio en R3, pero de rango 2. A su vez, a la dimensión del espacio completo se le puede llamar rango, pero es mejor hablar de dimensión.")
136
Bases, Dimensión y coordenadas
El espacio Rn tiene timensión n. Si la dimensión de un espacio es p cualquier conjunto con s vectores s>p es L.D. En efecto, la base tiene p vectores y el resto será una C.L. de la base.

137
Bases, Dimensión y coordenadas
Teorema. Un espacio tiene dimensión finita k ssi k es el maximo número de vectores que se pueden obtener en el espacio. Demo. Si la dimensión es k la base tiene k vectores son L.I. y cualquier otro es una C.L. de la base (ya no es L.I.). Si el máximo número de vectores L.I. es k estos generan todo el espacio y por tanto es una base k es la dimensión.
. Si el máximo número de vectores L.I. es k estos generan todo el espacio y por tanto es una base k es la dimensión.")
138
Bases, Dimensión y coordenadas
Ok, regresemos a la representación de vectores 1 1 B1={ } 4 1 1 =

139
Bases, Dimensión y coordenadas
El mismo vector en otra base 1 1 B2={ } 4 1 1 =

140
Bases, Dimensión y coordenadas
Si el mismo vector se puede representar en diferentes bases, ¿se podrá transformar de una en otra? 1 4 1 4 =

141
Bases, Dimensión y coordenadas
-1 1 1 4 4 = Matriz de cambio de base de B1 a B2

142
Bases, Dimensión y coordenadas
El concepto fácilmente se puede generalizar a cualquier par de bases Lo que es más chido... (P[x]2,R) una posible base es B={1, x, x2} v1=1 en la base 1
 una posible base es B={1, x, x2} v1=1 en la base. 1.")
143
Bases, Dimensión y coordenadas
1 v2=x en la base v3=x2 1

144
Bases, Dimensión y coordenadas
v4=1-x v5=3+x v6=-2+2x+x2 v7=2+3x+7x2 ¿Son L.I.? ¡¡¡Todo cambia a matrices!!!

145
Espacios vectoriales Kernel, imagen, espacio columna y espacio fila de una matriz Ecuaciones lineales y espacios vectoriales Cambio de base Espacio cociente Sumas y sumas directas

146
Pausa: Cosas de una Matriz
Kernel. Todos los x tales que Ax=0 Kernel={x|Ax=0} Se puede hablar de dos kerneles, el izquierdo y el derecho KerI={y|yTA=0} KerD={x|Ax=0}

147
Pausa: Cosas de una Matriz
Imagen Todos los y que son obtenidos de A multiplicado por un vector Imagen={y|Ax=y}

148
Pausa: Cosas de una Matriz
Teorema (operaciones columna y dependencia lineal). Suponer que una secuencia de operaciones elementales por renglón transforma la matriz A en la matriz B, entonces: Una colección de columnas de A es linealmente dependiente (independiente) ssi la collección correspondiente de columnas de B es linealmente dependiente (independiente). Una matriz renglón puede ser escrita como una combinación lineal de (esto es linealmente dependiendte de) todos los renglones de A ssi puede ser escrita como una combinación lineal de todos los renglones de B.
. Suponer que una secuencia de operaciones elementales por renglón transforma la matriz A en la matriz B, entonces: Una colección de columnas de A es linealmente dependiente (independiente) ssi la collección correspondiente de columnas de B es linealmente dependiente (independiente). Una matriz renglón puede ser escrita como una combinación lineal de (esto es linealmente dependiendte de) todos los renglones de A ssi puede ser escrita como una combinación lineal de todos los renglones de B.")
149
Pausa: Cosas de una Matriz
Demostración caso 1.- Sea F=E1E2...En la secuencia de matrices elementales que realizan las operaciones elementales que transforman a A en B. F tiene inversa=no singular FA=B Fx=0 x=0 (solución única) Si las columnas de A son L.D. entonces 1a1+2a2+...+nan=A[] FA[ ]=B[ ] Si A es LD hay muchas combinaciones
 Si las columnas de A son L.D. entonces. 1a1+2a2+...+nan=A[] FA[ ]=B[ ] Si A es LD hay muchas combinaciones ")
150
Pausa: Cosas de una Matriz
que dan cero esas mismas combinaciones en B dan cero y sus columnas son LI. Si A tiene una sola combinación que da cero, entonces en B será la única posibilidad de dar cero, ya que sólo es este caso FA[]=0 Apliquemos esto a cualquier colección de columnas de A y se tendrá la demostración de la primera parte. Demostración caso 2.- Un matriz renglón y es una CL de los renglones de A ssi y=xA para alguan matriz renglón x, pero y=xF-1FA=x’B, para x’=xF-1

151
Pausa: Cosas de una Matriz
como FA=B; y y=x´B ssi y es una CL de los renglones de B.

152
Pausa: Cosas de una Matriz
Veamos más a fondo el método de Gauss 1 -1 2 3 4 1 -1 2 3 5 -2 4

153
Pausa: Cosas de una Matriz
Veamos más a fondo el método de Gauss 1 -1 2 3 -2 5 4 1 -1 2 3 2/3 5/3 -2 -11/3 -23/3

154
Pausa: Cosas de una Matriz
Veamos más a fondo el método de Gauss 1 -1 2 3 2/3 -5/3 -11/3 -23/3 1 -1 2 3 2/3 5/3

155
Pausa: Cosas de una Matriz
Columnas dominantes 2 3 1 1 1.5 Forma de Gauss Matriz

156
Pausa: Cosas de una Matriz
Columnas dominantes 1 -1 1 -1 Forma de Gauss Matriz

157
Pausa: Cosas de una Matriz
Columnas dominantes -1 1 1 Forma de Gauss Matriz

158
Matrices Por intercambio de renglones hacer que el elemento (1,1) sea diferente de cero. Si no es posible es porque toda la columna 1 es igual a cero, tacharla y tratar de hacer lo mismo para la submatriz generada El proceso se repite hasta tener un elemento diferente de cero.

159
Matrices Todo el renglón se divide entre el elemento diferente de cero y se procede a hacer cero el resto de los elementos de esta columna de acuerdo al método de Gauss

160
Matrices Una vez hecho esto se tacha el renglón y se obtiene una nueva submatriz Con esta nueva submatriz se procede desde el punto 1) El resultado es la matriz en la forma de Gauss

161
Matrices Si se tiene un renglón diferente de cero, entonces a la primer columna diferente de cero se le llamará dominante o líder.

162
Pausa: Cosas de una Matriz
Teorema (matrices reducidas y dependencias) Suponer que G es una matriz en la forma de Gauss y de rango k a) El conjunto de las k columnas líderes es linealmente independiente b) Cualquier columna a la izquierda de la primera columna líder es una columna cero. Cualquier columna a la izquierda de la i-ésima columna líder es combinación lineal de las anteriores columnas líderes.
 Suponer que G es una matriz en la forma de Gauss y de rango k. a) El conjunto de las k columnas líderes es linealmente independiente. b) Cualquier columna a la izquierda de la primera columna líder es una columna cero. Cualquier columna a la izquierda de la i-ésima columna líder es combinación lineal de las anteriores columnas líderes.")
163
Pausa: Cosas de una Matriz
Definición.- Sea A una matriz de p*q a) El espacio columna de A es el subespacio que es generado por el conjunto de columnas de A b) El espacio renglón de A es el subespacio generado por los renglones de A.
 El espacio columna de A es el subespacio que es generado por el conjunto de columnas de A. b) El espacio renglón de A es el subespacio generado por los renglones de A.")
164
Pausa: Cosas de una Matriz
Poner ejemplos Dar las condiciones para que el sistema tenga solución. Ax=b

165
Pausa: Cosas de una Matriz
Teorema. Sea una matriz A de rango k. Entonces a) El espacio columna de A tiene diemnsión k. Una base son las columnas líderes. b) El espacio renglón es de dimensión k, una base son los renglones diferentes de cero. c) Una matriz p*p es no singular si sus columnas son LI rango p d) Una matriz p*p es no singular si sus renglones son LI rango p
 El espacio columna de A tiene diemnsión k. Una base son las columnas líderes. b) El espacio renglón es de dimensión k, una base son los renglones diferentes de cero. c) Una matriz p*p es no singular si sus columnas son LI rango p. d) Una matriz p*p es no singular si sus renglones son LI rango p.")
166
Matrices Corolario Rango por columnas = rango por filas Teorema (espacios renglón iguales). Sea A1 y A2 matrices de tamaño r*q y s*q respectivamente. El espacio renglón de A1 es igual al espacio rengloón de A2 ssi los renglones no cero de las matrices de Gauss coinciden.
. Sea A1 y A2 matrices de tamaño r*q y s*q respectivamente. El espacio renglón de A1 es igual al espacio rengloón de A2 ssi los renglones no cero de las matrices de Gauss coinciden.")
167
El maldito Kernel otra vez
Definición: Sea f:XY una función de X a Y. Con f se asocia una relación de equivalencia llamada equivalencia kernel de f y se denota por Ker f y está definida como sigue: x1,x2X, x1~x2 ssi f(x1)=f(x2) (mostrar que sí es una relación de equivalencia y por tanto particiona a X)
=f(x2) (mostrar que sí es una relación de equivalencia y por tanto particiona a X)")
168
Por qué se le llama equivalencia kernel
Sucede que en el caso de homomorfismos si f(x1)=f(x2) f(x1)-f(x2)=0 f(x1-x2)=0, i.e. x1-x2 está en el kernel de f. Claramente una matriz A puede ser considereda como una función (y aún más, un homomerfismo, chequen en clase esto y verán que si la hace). Entonces el kernel que definimos de A es consistente con el kernel en homomerfismos y sucede que:
=f(x2) f(x1)-f(x2)=0 f(x1-x2)=0, i.e. x1-x2 está en el kernel de f. Claramente una matriz A puede ser considereda como una función (y aún más, un homomerfismo, chequen en clase esto y verán que si la hace). Entonces el kernel que definimos de A es consistente con el kernel en homomerfismos y sucede que:")
169
Por qué se le llama equivalencia kernel
El kernel de A es un subespacio La imagen de A es un subespacio Ya qué no saben qué, A/ker A es un espacio y se le llama espacio cociente.

170
Entendamos bien esto, que está demasiado fácil, salvo la primera vez
Encontrar Kernel, imagen (range, no rank), A/Ker A de la siguiente matriz A. 1 -1
, A/Ker A de la siguiente matriz A")
171
Sistemas Lineales III: Control Geométrico-1.8
Sean X y Y dos conjuntos cualesquiera. Sea A:XY una función cualquiera. Entonces se puede definir la relación Ker A de la siguiente forma: x1~x2 ssi A(x1)=A(x2) Note que la relación Ker A es una relación de equivalencia. Como es una relación de equivalencia, entonces diremos que x1x2 (mod Ker A) –x1 es equivalente a x2 módulo Ker A- -También se dice que x1 es congruente a x2 vía Ker A o que la relación Ker A es una congruencia-
=A(x2) Note que la relación Ker A es una relación de equivalencia. Como es una relación de equivalencia, entonces diremos que x1x2 (mod Ker A) –x1 es equivalente a x2 módulo Ker A- -También se dice que x1 es congruente a x2 vía Ker A o que la relación Ker A es una congruencia-")
172
Significado geométrico de esta relación
X Y clusters y1 x1 x2 x3 y2 x4 y3 x5 y4 x6 Imagen de A Observe que hay tantos clusters como imágenes de A Podemos hacer el conjunto de los clusters

173
Significado geométrico de esta relación
clusters A este conjunto lo llamaremos X/Ker A, o conjunto cociente X/Ker A c1={x1, x2, x3} c2={x4} c3={x5, x6} (A menudo yo le llamo conjunto de clustercillos)
")
174
Significado geométrico de esta relación
X/Ker A Noten que la relación Ker A está dando una medida de la inyectividad de A. Si el número de clusters es igual al número de elementos en X, entonces A es inyectiva. c1={x1, x2, x3} c2={x4} c3={x5, x6} A los clusters se les llama coconjuntos (cosets) y son justamente los subconjuntos de X sobre los cuales A tiene diferente valor. También se les suele llamar las “fibras” de A.
 y son justamente los subconjuntos de X sobre los cuales A tiene diferente valor. También se les suele llamar las fibras de A.")
175
Significado geométrico de esta relación
Ejem. A(x)=x módulo 4 -es el residuo de la división, no la congruencia X 3 7 Aquí está A 2 6 Y X/Ker A c2=[1 5 9] 1 3 c1=[0 4 8] c4=[3 7] c3=[2 6] 2 Como X/Ker A y la imagen de A tienen la misma cantidad de elementos, entoces hay un isomorfismo entre X/Ker A y Im(A) [X/Ker AIm(A)]
=x módulo 4 -es el residuo de la división, no la congruencia. X Aquí está A Y. X/Ker A. c2=[1 5 9] c1=[0 4 8] c4=[3 7] c3=[2 6] 2. Como X/Ker A y la imagen de A tienen la misma cantidad de elementos, entoces hay un isomorfismo entre X/Ker A y Im(A) [X/Ker AIm(A)]")
176
Significado geométrico de esta relación
Proposición. Sea A:XY y sea PA:XX/Ker A su proyección canónica, entonces g:X/ker Aim(A) tal que A=gPA, donde g es un isomorfismo. X 3 7 Aquí está A 2 6 PA Y X/Ker A c2=[1 5 9] 1 3 c1=[0 4 8] c4=[3 7] c3=[2 6] 2
 tal que A=gPA, donde g es un isomorfismo. X Aquí está A PA. Y. X/Ker A. c2=[1 5 9] c1=[0 4 8] c4=[3 7] c3=[2 6] 2.")
177
Demostración Definir g(z)=A(x) ssi z=PA(x). Se afirma que g(z) es función Cubre todo X. Como A es función, entonces a cubre todo X, y por la definición anterior, g también cubrirá todo X Un valor de X/Ker A no está asociado a dos valores de Y. Suponer que si es así, (z,y1), (z,y2)g. Entonces y1y2. Por la definición de g se tiene: z= PA(x1), y1=A(x1) y además z= PA(x2), y2=A(x2) Como PA(x1),= PA(x2) implica que A(x1)= A(x2) Entonces y1=y2, una contradicción, entonces Un valor de X/Ker A no está asociado a dos valores de Y Por tanto g(z) si es función.
, (z,y2)g. Entonces y1y2. Por la definición de g se tiene: z= PA(x1), y1=A(x1) y además. z= PA(x2), y2=A(x2) Como PA(x1),= PA(x2) implica que A(x1)= A(x2) Entonces y1=y2, una contradicción, entonces. Un valor de X/Ker A no está asociado a dos valores de Y. Por tanto g(z) si es función.")
178
Demostración Ahora veremos que g es un isomorfismo.
g es inyectiva. Suponer que no es así, i.e. (z,y),(z’,y)g Entonces zz’ Entonces z=PA(x) y z’=PA(x’) Además A(x)=A(x’)=y. Como tienen la misma y, entonces PA(x)=PA(x’), una contradicción. Por tanto es inyectiva. g es sobre. Como g:X/Ker AIm(A), sólo abarca las imágenes de A. Por definición de g, cualquier imagen de A tiene una preimagen en X/Ker A. Por lo tanto g es sobre. Como es inyectiva y sobre, es un isomorfismo.
,(z’,y)g. Entonces zz’ Entonces z=PA(x) y z’=PA(x’) Además A(x)=A(x’)=y. Como tienen la misma y, entonces PA(x)=PA(x’), una contradicción. Por tanto es inyectiva. g es sobre. Como g:X/Ker AIm(A), sólo abarca las imágenes de A. Por definición de g, cualquier imagen de A tiene una preimagen en X/Ker A. Por lo tanto g es sobre. Como es inyectiva y sobre, es un isomorfismo.")
179
Demostración Por definición A=goPA

180
Significado geométrico de esta relación
Estamos en los límites... Si los conjuntos tienen estructura matemática, p.e. X, Y son espacios vectoriales y la función A resulta ser un operador lineal. Ax1=Ax2 es la relación Ker A. Un caso particular es para la imagen cero. En este caso todos los x, tales que Ax=0 formarán una clase de equivalencia. Las demás clases de equivalencia las obtendremos al estudiar las otras imágenes de A. Sin embargo, este proceso puede resultar muy lento, sobre todo porque Y tiene un número infinito de elementos. Una forma más adecuada es estudiarlos a través de la clase de equivalencia del 0 [0].

181
Significado geométrico de esta relación
Estamos en los límites... Por ejemplo, si queremos estudiar el caso para la imagen y, entonces debemos encontrar todos los x tales que Ax=y. x1, x2 [x], Ax1=Ax2=y, entonces A(x1-x2)=0. Entonces si x1[x], se tiene que x2[x] ssi (x1-x2)[0]. Como la clase [0] es un subespacio de X De hecho si Ax=0 y Ay=0, entonces A(x+y)=0 y por tanto es un subespacio entonces (x1-x2) span[0], o (x1-x2) = 1e1+2e2+...+nen Si x1 está fijo, entonces x2= x1-1e1-2e2-...-nen (1) Como con la clase de equivalencia [0] se generan todas las demás, a está clase la llamaremos genéricamente Kernel de A.
=0. Entonces si x1[x], se tiene que x2[x] ssi (x1-x2)[0]. Como la clase [0] es un subespacio de X. De hecho si Ax=0 y Ay=0, entonces A(x+y)=0 y por tanto es un subespacio. entonces (x1-x2) span[0], o (x1-x2) = 1e1+2e2+...+nen. Si x1 está fijo, entonces x2= x1-1e1-2e2-...-nen (1) Como con la clase de equivalencia [0] se generan todas las demás, a está clase la llamaremos genéricamente Kernel de A.")
182
Significado geométrico de esta relación
Estamos en los límites... Como se observa, la ecuación (1) es un método para calcular todas las clases de equivalencia [x2]. Se puede ver que es un un espacio vectorial (el del Kernel) desplazado por x1 (cualquier vector de la clase). A esta clase de equivalencia, y sólo cuando hablamos de operadores lineales en espacios vectoriales, le llamaremos una variedad lineal. No es un espacio, ya que en general, el cero no está incluído en dicha variedad, pero si será un espacio vectorial vía módulo algún vector de la clase. Ejemplos
 es un método para calcular todas las clases de equivalencia [x2]. Se puede ver que es un un espacio vectorial (el del Kernel) desplazado por x1 (cualquier vector de la clase). A esta clase de equivalencia, y sólo cuando hablamos de operadores lineales en espacios vectoriales, le llamaremos una variedad lineal. No es un espacio, ya que en general, el cero no está incluído en dicha variedad, pero si será un espacio vectorial vía módulo algún vector de la clase. Ejemplos.")
183
Significado geométrico de esta relación
Estamos en los límites... A:22 tal que A([x y]T)=[x–y y-x]T. Claramente A es un operador lineal y un vector de la forma [k k]T está en la clase de equivalencia [0] o Kernel de A. El vector [2 1]T no está en la clase [0], pero si está en la clase [[2 1]T]. Los vectores que pertenecen a esta clase, de acuerdo a la ecuación (1) son: X=[2 1]T-[1 1]T
=[x–y y-x]T. Claramente A es un operador lineal y un vector de la forma [k k]T está en la clase de equivalencia [0] o Kernel de A. El vector [2 1]T no está en la clase [0], pero si está en la clase [[2 1]T]. Los vectores que pertenecen a esta clase, de acuerdo a la ecuación (1) son: X=[2 1]T-[1 1]T.")
184
Significado geométrico de esta relación
Estamos en los límites... Clase [0] Clase [2 1]T

185
Significado geométrico de esta relación
Estamos en los límites... En realidad, cada clase forma una línea paralela al Kernel de A.

186
Significado geométrico de esta relación
Si tenemos un operador lineal A:VW, entonces el Kernel de A será un subespacio de V, y cada una de las clases de equivalencia será una variedad lineal paralela al Kernel de A. Más aún, el conjunto de las clases de equivalencia se denotará en la forma común V/Ker A y será llamado el espacio cociente V/Ker A. Proposición. Sea un operador lineal A:VW, entonces el conjunto V/Ker A es un espacio vectorial. Demo. En este espacio, el vector nulo es la clase [0]. De hecho se tiene

187
Significado geométrico de esta relación
[v1]=[v1]+[0] para cualquier v1V. De la ecuación (1) x2= v1-1e1-2e2-...-nen se observa que esto es cierto, ya que x2[v1]. Los escalares, son los del campo definido en V. La suma de vectores [v1]+[v2]=[v3] se define como x1[v1], x2[v2] y x1+x2[v3]. Note que está bien definida ya que cualquier x1[v1] y x2[v2] sirven. De hecho v1- 1[0]+v2- 2[0]=v1+v2- [0]=[v3] Todas las propiedades se pueden demostrar y resulta un espacio vectorial
 x2= v1-1e1-2e2-...-nen se observa que esto es cierto, ya que x2[v1]. Los escalares, son los del campo definido en V. La suma de vectores [v1]+[v2]=[v3] se define como x1[v1], x2[v2] y x1+x2[v3]. Note que está bien definida ya que cualquier x1[v1] y x2[v2] sirven. De hecho v1- 1[0]+v2- 2[0]=v1+v2- [0]=[v3] Todas las propiedades se pueden demostrar y resulta un espacio vectorial.")
188
Significado geométrico de esta relación
,... Pero hay más cosas Claramente, Im(A)V/Ker A. Vimos que esto se cumple aún en el caso que no sean espacios vectoriales. Ahora volvamos a los conjuntos. Vimos que si A:XY, entonces Ker A es una relación de equivalencia. Por la definición, cualquier función deja una relación de equivalencia en su dominio. Pero, además, nosotros sabemos que una relación de equivalencia sobre un conjunto X es equivalente a una partición de X
V/Ker A. Vimos que esto se cumple aún en el caso que no sean espacios vectoriales. Ahora volvamos a los conjuntos. Vimos que si A:XY, entonces Ker A es una relación de equivalencia. Por la definición, cualquier función deja una relación de equivalencia en su dominio. Pero, además, nosotros sabemos que una relación de equivalencia sobre un conjunto X es equivalente a una partición de X.")
189
Espacios vectoriales con producto interno

190
Espacios vectoriales con producto interno
5.2 Desigualdad de Cauchy-Schwarz 5.3 Ortogonalidad 5.4 Procedimiento de Gram-Schmidt 5.5 Espacios normados

191
Norma Definición.- Una norma (o norma vectorial) en (V,F) es una funcional que asigna a cada vector v un número real no negativo, llamado norma del vector v, y es denotado por ||v|| y satisface: ||v||>0 para v0, y ||0||=0 ||v||=|| ||v|| escalar y v vector ||u+v||||u||+||v||
 en (V,F) es una funcional que asigna a cada vector v un número real no negativo, llamado norma del vector v, y es denotado por ||v|| y satisface: ||v||>0 para v0, y ||0||=0. ||v||=|| ||v|| escalar y v vector. ||u+v||||u||+||v||")
192
Norma Definición.- Para vectores x=[x1 x2 ... xp]T, las normas ||||1, ||||2, |||| son llamadas norma 1, norma 2 y norma infinito respectivamente y se definen como: ||||1=|x1|+|x2|+...+|xp| ||||2=(|x1|2+|x2|2+...+|xp|2)1/2 ||||=max{|x1|, |x2|, ...,|xp|}
1/2. ||||=max{|x1|, |x2|, ...,|xp|}")
193
Norma Definición.- Sea |||| una norma en (V,F). Una secuencia de vectores vi se dice que converje al vector v ssi la secuencia de número reales ||vi-v|| Para vectores x=[x1 x2 ... xp]T, las normas ||||1, ||||2, |||| son llamadas norma 1, norma 2 y norma infinito respectivamente y se definen como: ||||1=|x1|+|x2|+...+|xp| ||||2=(|x1|2+|x2|2+...+|xp|2)1/2 ||||=max{|x1|, |x2|, ...,|xp|}
. Una secuencia de vectores vi se dice que converje al vector v ssi la secuencia de número reales ||vi-v|| Para vectores x=[x1 x2 ... xp]T, las normas ||||1, ||||2, |||| son llamadas norma 1, norma 2 y norma infinito respectivamente y se definen como: ||||1=|x1|+|x2|+...+|xp| ||||2=(|x1|2+|x2|2+...+|xp|2)1/2. ||||=max{|x1|, |x2|, ...,|xp|}")
194
Norma Teorema: Sean x, y dos vectores. Entonces |xTy|||x||2||y||2
Demostración. sabemos 0||x+y||=(x+y)T(x+y)=||x||22+ 2 ||y||22+2 |xTy| si =-||x||22/xTy, entonces 0-||x||22+(||x||24||y||22/xTy|2) Despejando se llega a la desigualdad
T(x+y)=||x||22+ 2 ||y||22+2 |xTy| si =-||x||22/xTy, entonces. 0-||x||22+(||x||24||y||22/xTy|2) Despejando se llega a la desigualdad.")
195
Producto interno Definición. El producto interno en (V,F) sobre un par de vectores (u,v) que satisface: (u,v)=(v,u) (u+v,w)= (u,w)+ (v,w) (w,u+v)= (w,u)+ (w,v) (u,u)>0, y es igual a cero si u es cero.
=(v,u) (u+v,w)= (u,w)+ (v,w) (w,u+v)= (w,u)+ (w,v) (u,u)>0, y es igual a cero si u es cero.")
196
Producto interno El producto interno (u,v)1/2 induce una norma en el espacio vectorial. Definición. Sean el producto interno (,) u, v son ortogonales ssi (u,v)=0 Un conjunto de vectores son ortogonales ssi cada par de vectores (u,v) son ortogonales Si un vector u es usado para producir u/||u|| tal que ||v||=1, entonces u se dice ser normalizado para producir el vector normalizado v Un conjunto de vectores se dice ortonormal ssi es ortogonal y ||v||=1 para todo vector v
=0. Un conjunto de vectores son ortogonales ssi cada par de vectores (u,v) son ortogonales. Si un vector u es usado para producir u/||u|| tal que ||v||=1, entonces u se dice ser normalizado para producir el vector normalizado v. Un conjunto de vectores se dice ortonormal ssi es ortogonal y ||v||=1 para todo vector v.")
197
Producto interno Diferentes productos internos (u,v)=uTv
si f y g son funciones real valuadas continuas en 0t1, entonces (f,g)=
=")
198
Proyecciones ortogonales
Teorema. Sea (V,F) un espacio vectorial. Sea (V0,F) un subespacio generado por los vectores ortogonales S={v1,...,vq}. Defínase la proyección ortogonal como sigue. Para cualquier vector v P0v=1v1+...+qvq, donde i=(vi,v)/(vi,vi) entonces v-P0v es ortogonal a todo vector v en (V0,F) P0(u+v)=P0u+P0v P0(v)= P0v
 un espacio vectorial. Sea (V0,F) un subespacio generado por los vectores ortogonales S={v1,...,vq}. Defínase la proyección ortogonal como sigue. Para cualquier vector v. P0v=1v1+...+qvq, donde i=(vi,v)/(vi,vi) entonces. v-P0v es ortogonal a todo vector v en (V0,F) P0(u+v)=P0u+P0v. P0(v)= P0v.")
199
Proyecciones ortogonales
Demostración (vi,v-P0v)=(vi,v)-1(vi,v1)-...-q(vi,vq)=(vi,v)- i(vi,vi)=0 Los otros puntos salen de la definición de los coeficientes . v v-P0v vi P0v= vi
=(vi,v)-1(vi,v1)-...-q(vi,vq)=(vi,v)- i(vi,vi)=0. Los otros puntos salen de la definición de los coeficientes . v. v-P0v. vi. P0v= vi.")
200
Proyecciones ortogonales
Teorema. Sea (V,F) un espacio vectorial con producto interno y con su norma inducida por el producto interno ||||. Sea (V0,F) un subespacio generado por los vectores ortogonales S={v1,...,vq}. Entonces para cualquier v, P0v es el único punto más cercano en (V0,F) a v, y ||v-P0v|| es la distancia de v a (V0,F) ||v-P0v||<||v-v0|| para todo v0 diferente de P0v en (V0,F)
 un espacio vectorial con producto interno y con su norma inducida por el producto interno ||||. Sea (V0,F) un subespacio generado por los vectores ortogonales S={v1,...,vq}. Entonces para cualquier v, P0v es el único punto más cercano en (V0,F) a v, y ||v-P0v|| es la distancia de v a (V0,F) ||v-P0v||<||v-v0|| para todo v0 diferente de P0v en (V0,F)")
201
Proyecciones ortogonales
Demostración. ||v-v0||2=(v-v0,v-v0)=(v-P0v+P0v-v0, v-P0v+P0v-v0)= (v-P0v, v-P0v )+(v-P0v, P0v-v0)+(P0v-v0,v- P0v)+(P0v-v0, P0v-v0) Sabemos que v- P0v es ortogonal a los vectores en (V0,F), entonces se obtiene que: ||v-v0||=||v- P0v||+|| P0v-v0|| entonces ||v-v0||>||v- P0v|| a menos que v0= ||v-v0||=||v- P0v||+||
=(v-P0v+P0v-v0, v-P0v+P0v-v0)= (v-P0v, v-P0v )+(v-P0v, P0v-v0)+(P0v-v0,v- P0v)+(P0v-v0, P0v-v0) Sabemos que v- P0v es ortogonal a los vectores en (V0,F), entonces se obtiene que: ||v-v0||=||v- P0v||+|| P0v-v0|| entonces ||v-v0||>||v- P0v|| a menos que v0= ||v-v0||=||v- P0v||+||")
202
Proyecciones ortogonales
Sea S={v1,...,vq} un conjunto de vectores ortogonales, entonces estos vectores son linealmente independientes. si se toma el vector 0=c1v1+...+cqvq, tenemos que saber el valor de cada ci. 0=(vi,0)=(vi,c1v1+...+cqvq)=ci(vi,vi) como (vi,vi)>0 ci=0 y son L.I.
=(vi,c1v1+...+cqvq)=ci(vi,vi) como (vi,vi)>0 ci=0 y son L.I.")
203
Proyecciones ortogonales
Se sigue que si el vector proyectado v está en el espacio (V0,F), entonces P0v será el mismo v y los valores de las i será la representación del vector en la base seleccionada S.
, entonces P0v será el mismo v y los valores de las i será la representación del vector en la base seleccionada S.")
204
Proyecciones ortogonales
Teorema. Sea B={v1,...vq} una base ortogonal. La representación del vector v se calcula como v=1v1+...+qvq, donde i=(vi,v)/(vi,vi) Note que si la base es ortonormal, entonces los i se calculan fácilmente
/(vi,vi) Note que si la base es ortonormal, entonces los i se calculan fácilmente.")
205
Proyecciones ortogonales
Si tenemos S={v1,...,vq} un conjunto de vetores que genera (V,F) Tomar u1=v1, desde 2 hasta q, ui=vi-Pi-1vi
 Tomar u1=v1, desde 2 hasta q, ui=vi-Pi-1vi.")
206
Transformaciones lineales

207
Transformaciones lineales
6.1 Definición 6.2 Propiedades 6.3 Kernel e imagen de una transformación lineal 6.4 Representación matricial de una transformación lineal 6.5 Isomorfismos 6.6 Operaciones con transformaciones lineales 6.7 Algebra de transformaciones lineales

208
Transformaciones lineales
Definición. Sean (V,F) y (W,G) dos espacios vectoriales. Una transformación lineal T de (V,F) a (W,G) es una correspondencia que asigna a cada vector v en V un vector w en W tal que: T(v1+v2)=T(v1)+T(v2) T(v)= T(v) Se sigue que T(0)=0, ya que T(v)=T(v+0)=T(v)+T(0) lo que implica que T(0) debe ser el cero de W.
 y (W,G) dos espacios vectoriales. Una transformación lineal T de (V,F) a (W,G) es una correspondencia que asigna a cada vector v en V un vector w en W tal que: T(v1+v2)=T(v1)+T(v2) T(v)= T(v) Se sigue que T(0)=0, ya que T(v)=T(v+0)=T(v)+T(0) lo que implica que T(0) debe ser el cero de W.")
209
Transformaciones lineales
El espacio imagen Todos los vectores w en (W,G) tal que w=T(v) Solución. Si w es fijo, entonces existe v en (V,F) tal que T(v)=w ssi w está en la imagen de T. Se aplica Sobre Claramente el problema Solución tiene solución si T es onto.
 tal que w=T(v) Solución. Si w es fijo, entonces existe v en (V,F) tal que T(v)=w ssi w está en la imagen de T. Se aplica Sobre. Claramente el problema Solución tiene solución si T es onto.")
210
Transformaciones lineales
Otro problema es si la solución es única. T(v1)=T(v2)=w Se aplica Inyectividad Claramente la solución es única si w esta en la imagen de T y T es inyectiva. T(v1)=T(v2) T(v1)-T(v2)=0 T(v1-v2)=0 También T tiene kernel.
=T(v2)=w. Se aplica Inyectividad. Claramente la solución es única si w esta en la imagen de T y T es inyectiva. T(v1)=T(v2) T(v1)-T(v2)=0 T(v1-v2)=0. También T tiene kernel.")
211
Transformaciones lineales
Más propiedades de las transformaciones lineales T(u-v)=T[u+(-1)v]=T(u)+T[(-1)v]=T(u)+(-1)T(v)=T(u)-T(v) T(1v1+...+nvn)= 1v1+...+nvn Esto se puede ver por asociatividad e inducción Teorema. Sea (V,F) un espacio vectorial de dimensión finita con base B={v1,...vn} y T1, T2 dos transformaciones lineales. Si T1(vi)=T2(vi) para todo vi en B, entonces T1(v)=T2(v) para v en (V,F). Demo, como cualquier vector de (V,F) se escribe como v= 1v1+...+nvn, entonces T1(v)=T1(1v1+...+nvn)= T1(1v1)+...+T1(nvn)=T2(1v1)+...+T2(nvn)=T2(v)
=T[u+(-1)v]=T(u)+T[(-1)v]=T(u)+(-1)T(v)=T(u)-T(v) T(1v1+...+nvn)= 1v1+...+nvn. Esto se puede ver por asociatividad e inducción. Teorema. Sea (V,F) un espacio vectorial de dimensión finita con base B={v1,...vn} y T1, T2 dos transformaciones lineales. Si T1(vi)=T2(vi) para todo vi en B, entonces T1(v)=T2(v) para v en (V,F). Demo, como cualquier vector de (V,F) se escribe como v= 1v1+...+nvn, entonces T1(v)=T1(1v1+...+nvn)= T1(1v1)+...+T1(nvn)=T2(1v1)+...+T2(nvn)=T2(v)")
212
Transformaciones lineales
Teorema. Sea (V,F) un espacio vectorial de dimensión finita con base B={v1,...vn} y (W,G) un espacio vectorial que contiene a los vectores w1,...,wn, entonces existe una única transformación lineal tal que T(vi)=wi, para vi en B. Demo. Como cualquier vector de (V,F) se escribe como v= 1v1+...+nvn, entonces T se define como T(v)=1w1+...+nwn T será una transformación lineal T(u+v)=T[(1v1+...+nvn)+(1v nvn)]= =T[(1+1) v1+...+( n+n) vn] Por la definición de T, = (1+1) w1+...+( n+n) wn=T(u)+T(v)
 un espacio vectorial de dimensión finita con base B={v1,...vn} y (W,G) un espacio vectorial que contiene a los vectores w1,...,wn, entonces existe una única transformación lineal tal que T(vi)=wi, para vi en B. Demo. Como cualquier vector de (V,F) se escribe como v= 1v1+...+nvn, entonces T se define como T(v)=1w1+...+nwn. T será una transformación lineal T(u+v)=T[(1v1+...+nvn)+(1v nvn)]= =T[(1+1) v1+...+( n+n) vn] Por la definición de T, = (1+1) w1+...+( n+n) wn=T(u)+T(v)")
213
Transformaciones lineales
De igual forma T(u)=T[(1v nvn)] Por la definición de T, 1w nwn= T(u) Por teorema anterior se tiene la unicidad Tarea: Sean (V,F) y (W,G) dos espacios vectoriales y T:(V,F)(W,G) una transformación lineal. Demsotrar que el kernel de T es un subespacio de (V,F) y que la imagen de T es un subespacio de (W,G).
=T[(1v nvn)] Por la definición de T, 1w nwn= T(u) Por teorema anterior se tiene la unicidad. Tarea: Sean (V,F) y (W,G) dos espacios vectoriales y T:(V,F)(W,G) una transformación lineal. Demsotrar que el kernel de T es un subespacio de (V,F) y que la imagen de T es un subespacio de (W,G).")
214
Transformaciones lineales
Definición. Sean (V,F) y (W,G) dos espacios vectoriales y T:(V,F)(W,G) una transformación lineal. Nulidad de T = (T) =dim (Ker (T)) rango de T = (T) = dim (Im (T)) Teorema. Sean (V,F) y (W,G) dos espacios vectoriales y T:(V,F)(W,G) una transformación lineal. (T)+ (T) = dim (V,F) Demo. Suponer que (T)=r y que {v1,...vr} es una base para el kernel; además (T)=k y {w1,...wk} es una base para la imagen de T. Entonces hay que demostrar que B={v1,...,vr,u1,...,uk}
 y (W,G) dos espacios vectoriales y T:(V,F)(W,G) una transformación lineal. Nulidad de T = (T) =dim (Ker (T)) rango de T = (T) = dim (Im (T)) Teorema. Sean (V,F) y (W,G) dos espacios vectoriales y T:(V,F)(W,G) una transformación lineal. (T)+ (T) = dim (V,F) Demo. Suponer que (T)=r y que {v1,...vr} es una base para el kernel; además (T)=k y {w1,...wk} es una base para la imagen de T. Entonces hay que demostrar que B={v1,...,vr,u1,...,uk}")
215
Transformaciones lineales
Sea un v que pertenece a (V,F). Como T(v)= 1w1+...+kwK Al Vector v lo podemos escribir como v= 1u1+...+kuK-v’ v´= 1u1+...+kuK-v T(v’)=T(1u1+...+kuK-v)= 1T(u1)+...+kT(uk)-T(v) = 1w1+...+kwK-T(v)=0 v’ está en el kernel de T Como {v1,...vr} es una base de Kernel de T, existen escalares 1 ,.., r tal que v’= 1v rvr=1u1+...+kuK-v Por tanto v= 1u1+...+kuK- 1v rvr y {u1,...,uk, v1,..., vr} genera (V,F) Ahora hay que ver que sean L.I.
. Como T(v)= 1w1+...+kwK. Al Vector v lo podemos escribir como. v= 1u1+...+kuK-v’ v´= 1u1+...+kuK-v. T(v’)=T(1u1+...+kuK-v)= 1T(u1)+...+kT(uk)-T(v) = 1w1+...+kwK-T(v)=0 v’ está en el kernel de T. Como {v1,...vr} es una base de Kernel de T, existen escalares 1 ,.., r tal que v’= 1v rvr=1u1+...+kuK-v. Por tanto v= 1u1+...+kuK- 1v rvr. y {u1,...,uk, v1,..., vr} genera (V,F) Ahora hay que ver que sean L.I.")
216
Transformaciones lineales
Sea un vector 1u kuK+ 1v rvr=0 Entonces T(1u kuK+ 1v rvr)=0 Como los vi están en el kernel 0= 1w kwK, como los wi son una base de la magen, entonces son L.I. y la única solución es i=0 Entonces el vector se reescribe como 1v rvr=0 , como los vi son una base para el kernel son L.I., entonces la única solución i=0 y los vectores son L.I. y por lo tanto es una base y la dimensión de (V,F) es (T)+ (T) = dim (V,F)
=0. Como los vi están en el kernel 0= 1w kwK, como los wi son una base de la magen, entonces son L.I. y la única solución es i=0. Entonces el vector se reescribe como. 1v rvr=0 , como los vi son una base para el kernel son L.I., entonces la única solución i=0 y los vectores son L.I. y por lo tanto es una base y la dimensión de (V,F) es. (T)+ (T) = dim (V,F)")
217
Transformaciones lineales
Sean (V,F) y (W,G) dos espacios vectoriales y T:(V,F)(W,G) , entonces existe una única matriz A (dim(v), dim(W)) tal que T(x)=Ax A est la matriz de transformación correspondiente a T. Demo sea B={e1,...,en} la base canónica en (V,F) T(ei)=wi Se puede formar la matriz A=[w1 wn] entonces Aei=wi (T(ei)=wi) En general T(x)=T(1e nen)= 1w nwn También Ax=A[1e nen]= 1w nwn =T(x)
 y (W,G) dos espacios vectoriales y T:(V,F)(W,G) , entonces existe una única matriz A (dim(v), dim(W)) tal que T(x)=Ax. A est la matriz de transformación correspondiente a T. Demo. sea B={e1,...,en} la base canónica en (V,F) T(ei)=wi. Se puede formar la matriz A=[w1 wn] entonces Aei=wi (T(ei)=wi) En general T(x)=T(1e nen)= 1w nwn. También Ax=A[1e nen]= 1w nwn =T(x)")
218
Transformaciones lineales
Suponer que T(x)=Ax=Bx (A-B)x=0, para x=ei (A-B)ei=0 que la i-ésima columna de (A-B) es cero, por lo que las matrices son iguales y A es única. Teorema Sea A la matriz de transformación correspondiente a T, entonces i) Im T Im A, pero isomorfo ii)(T)=(A) iii)Ker TKer A, pero isomorfo iv)(T)=(A)
=Ax=Bx (A-B)x=0, para x=ei (A-B)ei=0 que la i-ésima columna de (A-B) es cero, por lo que las matrices son iguales y A es única. Teorema Sea A la matriz de transformación correspondiente a T, entonces. i) Im T Im A, pero isomorfo. ii)(T)=(A) iii)Ker TKer A, pero isomorfo. iv)(T)=(A)")
219
Transformaciones lineales
Teorema. Sean (V,F), (W,G) dos espacios vectoriales de dimensiones n y m respectivamente. Sea T(V,F)(W,G) una transformación lineal. Sean B1={v1,...,vn} y B2={w1,...,wm} las bases de los espacios respectivamente. Entonces existe una única matriz A (m,n) tal que: [T(x)]B2=A(xB1) [T(x)]B2la representación de T(x) en B2 T(x)= 1w mwm [T(x)]B2=[1 ... m]T xB1 es la representación del vector en B1 La matriz A se conoce como la matriz de transformación correspondiente a T con respecto a las bases B1 y B2
, (W,G) dos espacios vectoriales de dimensiones n y m respectivamente. Sea T(V,F)(W,G) una transformación lineal. Sean B1={v1,...,vn} y B2={w1,...,wm} las bases de los espacios respectivamente. Entonces existe una única matriz A (m,n) tal que: [T(x)]B2=A(xB1) [T(x)]B2la representación de T(x) en B2. T(x)= 1w mwm [T(x)]B2=[1 ... m]T. xB1 es la representación del vector en B1. La matriz A se conoce como la matriz de transformación correspondiente a T con respecto a las bases B1 y B2.")
220
Transformaciones lineales
Considere los vectores T(v1, ...,T(vn), escríbase A=[[T(v1)]B [T(vn)]B2] Como AviB1=Aei= [T(vi)]B2 y xB1 es la representación del vector en B1, i.e. [1 ... n]T entonces A xB1=[[T(v1)]B [T(vn)]B2] xB1= 1[T(v1)]B2+...+[T(vn)]B2]n Por otro lado T(xB1)=T(1v1+...+nvn)= 1T(v1)+...+nT(vn) Al poner cada uno de estos vectores en la representación de la base B2 se obtiene que: A xB1= T(xB1) La unicidad es similar al teorema anterior
, escríbase. A=[[T(v1)]B2 ... [T(vn)]B2] Como AviB1=Aei= [T(vi)]B2. y xB1 es la representación del vector en B1, i.e. [1 ... n]T. entonces. A xB1=[[T(v1)]B2 ... [T(vn)]B2] xB1= 1[T(v1)]B2+...+[T(vn)]B2]n. Por otro lado. T(xB1)=T(1v1+...+nvn)= 1T(v1)+...+nT(vn) Al poner cada uno de estos vectores en la representación. de la base B2 se obtiene que: A xB1= T(xB1) La unicidad es similar al teorema anterior.")
221
Transformaciones lineales
Teorema.- Sea A (m,n) la matriz de transformación correspondiente a T:(V,F)(W,G) con respecto a las bases B1={v1,...,vn} y B2={w1,...,wm} respectivamente. Suponga que hay otras bases B1’={v1’,...,vn’} y B2’={w1’,...,wm’} de los espacios respectivos. Entonces la matriz A’ correspondiente a la misma transformación T con respecto a las bases B1’ y B2’ está dada por: A’=P-1AQ P es la matriz de transición (de paso) de la base B2’ en B2 Q es la matriz de transición (de paso) de la base B1’ en B1
 la matriz de transformación correspondiente a T:(V,F)(W,G) con respecto a las bases B1={v1,...,vn} y B2={w1,...,wm} respectivamente. Suponga que hay otras bases B1’={v1’,...,vn’} y B2’={w1’,...,wm’} de los espacios respectivos. Entonces la matriz A’ correspondiente a la misma transformación T con respecto a las bases B1’ y B2’ está dada por: A’=P-1AQ. P es la matriz de transición (de paso) de la base B2’ en B2. Q es la matriz de transición (de paso) de la base B1’ en B1.")
222
Transformaciones lineales
Demo. Sabemos que [T(x)]B2=AxB1 Ahora, xB1=QxB1’ y [T(x)]B2=P[T(x)]B2’ Por tanto P[T(x)]B2’=A QxB1’ [T(x)]B2’=P-1A QxB1’ A’=P-1AQ es la matriz de transformación
]B2=AxB1. Ahora, xB1=QxB1’ y [T(x)]B2=P[T(x)]B2’ Por tanto. P[T(x)]B2’=A QxB1’ [T(x)]B2’=P-1A QxB1’ A’=P-1AQ es la matriz de transformación.")
223
Transformaciones lineales
En especial, si (V,F) y (W,G) son los mismos, entonces A’=P-1AP Definición. Se dice que dos matrices cuadradas A y B son similares si existe una matriz P no singular (determinante diferente de cero) tal que B=P-1AP
 y (W,G) son los mismos, entonces. A’=P-1AP. Definición. Se dice que dos matrices cuadradas A y B son similares si existe una matriz P no singular (determinante diferente de cero) tal que. B=P-1AP.")
224
Transformaciones lineales
Transformaciones T Inyectiva Kernel T = {0} Sobre Teorema. T:VW una transformación lineal y dim v=n y dim w=m i) si n>m, T no es inyectiva ii) si m>n T no es sobre Demo. Tarea.
 si n>m, T no es inyectiva. ii) si m>n T no es sobre. Demo. Tarea.")
225
Transformaciones lineales
Definición. Una T.L es un Isomorfismos ssi es inyectiva y sobre. La matriz de un isomorfismo es invertible. Definición. Se dice que (V,F) y (W,G) son isomorfos ssi existe un isomorfismo entre ambos Teorema. Sean (V,F) y (W,G) dos espacios vectoriales de dimensión finita. Entonces (V,F) y (W,G) son isomorfos si dim (V,F)=dim (W,G) Demo. Obtener bases para cada uno. Entonces quedan representados en (Rn,R). Como son bases en el mismo espacio, existe una matriz de cambio de base A. por teoremas anteriores existe una T.L. asociada a A que es un isomorfismo. Si existe el isomorfismo entre las representaciones, lo existe entre los espacios.
 y (W,G) son isomorfos ssi existe un isomorfismo entre ambos. Teorema. Sean (V,F) y (W,G) dos espacios vectoriales de dimensión finita. Entonces (V,F) y (W,G) son isomorfos si dim (V,F)=dim (W,G) Demo. Obtener bases para cada uno. Entonces quedan representados en (Rn,R). Como son bases en el mismo espacio, existe una matriz de cambio de base A. por teoremas anteriores existe una T.L. asociada a A que es un isomorfismo. Si existe el isomorfismo entre las representaciones, lo existe entre los espacios.")
226
Transformaciones lineales
Corolario. Cualquier espacio de dimensión n es isomorfo a (Rn,R) Teorema. Si T:(V,F)(W,G) es un isomorfismo i) Si {v1,...vn} genera (V,F), entonces {T(v1),...,T(vn)} genera (W,G) ii) Si {v1,...vn} son L.I., entonces {T(v1),...,T(vn)} son L.I. iii) si {v1,...vn} es una base, entonces {T(v1),...,T(vn)} es una base. Demo. i) v=1v nvn T(v)=w=1T(v1) nT(vn) {T(v1),...,T(vn)} genera (W,G) iii) Suponga que 0=T(v)=w=1T(v1) nT(vn) , entonces T(1v nvn)=0, como T es isomorfismo T(0)=0 es el único. Entonces 1v nvn=0, pero como son L.I. i=0 y por tanto {T(v1),...,T(vn)} son L.I. iii) se sigue de anteriores.
 Teorema. Si T:(V,F)(W,G) es un isomorfismo. i) Si {v1,...vn} genera (V,F), entonces {T(v1),...,T(vn)} genera (W,G) ii) Si {v1,...vn} son L.I., entonces {T(v1),...,T(vn)} son L.I. iii) si {v1,...vn} es una base, entonces {T(v1),...,T(vn)} es una base. Demo. i) v=1v nvn T(v)=w=1T(v1) nT(vn) {T(v1),...,T(vn)} genera (W,G) iii) Suponga que 0=T(v)=w=1T(v1) nT(vn) , entonces T(1v nvn)=0, como T es isomorfismo T(0)=0 es el único. Entonces 1v nvn=0, pero como son L.I. i=0 y por tanto {T(v1),...,T(vn)} son L.I. iii) se sigue de anteriores.")
227
Transformaciones lineales
Prop. Si T:(V,F)(W,G) es un isomorfismo, entonces para todo vector wW existe un único vector v V tal que T-1(w)=v, donde T-1:(W,G)(V,F) es conocida como la transformación inversa de T. Demo. 2 partes T-1 es T.L. y T-1(w)=v único T(v1)=w1; T-1(w1)=v1; T(v2)=w2 T-1(w2)=v2 T(v1+v2)=T(v1)+T(v2)=w1+w2 T-1(w1+w2)=v1+v2 T(v1)= T(v1)= w1 T-1(w1)= v1 Como T es isomorfiso, la definición de T-1 hace que exista un único valor de regreso. Nota. T es T.L. A es su operador T-1 es la inversa de T, entonces A-1 es el operador de T-1
(W,G) es un isomorfismo, entonces para todo vector wW existe un único vector v V tal que. T-1(w)=v, donde T-1:(W,G)(V,F) es conocida como la transformación inversa de T. Demo. 2 partes T-1 es T.L. y T-1(w)=v único. T(v1)=w1; T-1(w1)=v1; T(v2)=w2 T-1(w2)=v2. T(v1+v2)=T(v1)+T(v2)=w1+w2 T-1(w1+w2)=v1+v2. T(v1)= T(v1)= w1 T-1(w1)= v1. Como T es isomorfiso, la definición de T-1 hace que exista un único valor de regreso. Nota. T es T.L. A es su operador. T-1 es la inversa de T, entonces A-1 es el operador de T-1.")
228
Transformaciones lineales
Operaciones con transformaciones lineales Sean (V,F) y (W,F) dos espacios vectoriales sobre el mismo campo F. Hom(V,W) es el conjutno de todas las transformaciones lineales entre (V,F) y (W,F). Sean T1 y T2 dos T.L. entre (V,F) y (W,F) Se define la suma T1+T2 como T1+T2:VW (T1+T2)(v)=T1(v)+T2(v) para todo F, T1 es (T1)(v)=T1(v)
 y (W,F) dos espacios vectoriales sobre el mismo campo F. Hom(V,W) es el conjutno de todas las transformaciones lineales entre (V,F) y (W,F). Sean T1 y T2 dos T.L. entre (V,F) y (W,F) Se define la suma T1+T2 como. T1+T2:VW (T1+T2)(v)=T1(v)+T2(v) para todo F, T1 es. (T1)(v)=T1(v)")
229
Transformaciones lineales
El conjunto Hom(V,W) definido anteriormente es un espacio vectorial sobre el campo F. Demo. Tarea.
 definido anteriormente es un espacio vectorial sobre el campo F. Demo. Tarea.")
230
Algebra de Transformaciones lineales
Definición. Un álgebra A sobre un campo F es un espacio vectorial sobre F en el que se tiene definida una operación producto que satisface para todos los elementos T1, T2, T3 A y F: T1(T2+T3)=T1T2+T1T3 (T2+T3)T1=T2T1+T3T1 (T1T2)=(T1)T2=T1(T2) Si además se cumple que (T1T2)T3=T1(T2T3) entonces A es un álgebra asociativa
=T1T2+T1T3. (T2+T3)T1=T2T1+T3T1. (T1T2)=(T1)T2=T1(T2) Si además se cumple que. (T1T2)T3=T1(T2T3) entonces A es un álgebra asociativa.")
231
Algebra de Transformaciones lineales
Definición. Sean V, U y W espacios vectoriales sobre el mismo campo F. Sean T1:VU y T2:UW dos transformaciones lineales. Se define la composición de T2 seguida de T1 T2T1 como la función de V a W (T2T1) :VW tal que (T2T1)(v)=T2(T1(v)) Proposición. Si T1 y T2 son TL, entonces T2T1 también lo es. Demo. Sean u,v V y , F, entonces (T2T1)(v+u)=T2(T1(v+u))=T2(T1(v)+T1(u)) = (T2T1)(v)+ (T2T1)(u) (T2T1) es T.L. Puede verse que Hom(V,V) con la composición es un álgebra asociativa.
 :VW tal que (T2T1)(v)=T2(T1(v)) Proposición. Si T1 y T2 son TL, entonces T2T1 también lo es. Demo. Sean u,v V y , F, entonces. (T2T1)(v+u)=T2(T1(v+u))=T2(T1(v)+T1(u)) = (T2T1)(v)+ (T2T1)(u) (T2T1) es T.L. Puede verse que Hom(V,V) con la composición es un álgebra asociativa.")
232
Adicional de Transformaciones lineales
Sean A, B dos matrices de qxn y nxp con coeficientes en el mismo campo. Entonces (A)+(B)-n (AB) min((A), (B)) Demo (A) R(A) R(AB) (B) R(B) d p n n(A) n(B)
+(B)-n (AB) min((A), (B)) Demo. (A) R(A) R(AB) (B) R(B) d. p. n. n(A) n(B)")
233
Adicional de Transformaciones lineales
De la figura (AB)min((A), (B)). También (AB)= (B)-d (la intersección de R(B) y n(A). La dimensión de n(A)=n- (A) d n+ (A) y se sigue que (AB) (A)-n+ (B) Si B es no singular (A)+(B)-n = (A) (AB) min((A),n) = (A) (A) R(A) R(AB) (B) R(B) d p n n(A) n(B)
min((A), (B)). También (AB)= (B)-d (la intersección de R(B) y n(A). La dimensión de n(A)=n- (A) d n+ (A) y se sigue que (AB) (A)-n+ (B) Si B es no singular. (A)+(B)-n = (A) (AB) min((A),n) = (A) (A) R(A) R(AB) (B) R(B) d. p. n. n(A) n(B)")
234
4. Valores y vectores propios

235
Valores y vectores propios
Definición y propiedades Teorema de Cayley-Hamilton Diagonalización de matrices

236
Valores y vectores propios
Definición. Sea V un espacio vectorial y T:VV una transformación lineal del espacio en sí mismo. Sea vV un vector diferente de cero pa el cual existe un escalar tal que T(v)=v, entonces se dice que es un valor propio de T y que v es un vector propio de T asociado a .
=v, entonces se dice que es un valor propio de T y que v es un vector propio de T asociado a .")
237
Valores y vectores propios
Cuando V es un espacio de dimensión finita, la transformación T la podemos representar como una matriz A de n,n. Entonces podemos redefir los valores y vectores propios de la siguiente forma. Definición. Sea A una matriz de n,n. El escalar se denomina valor propio de A si existe un vector x diferente del nulo, tal que Ax= x nuevamente x es el vector propio asociado a .

238
Valores y vectores propios
Teorema. Sea A una matriz de n,n. Entonces es un valor propio de A ssi det(I-A)=0 Demo. Sólo si. Suponga que es un valor propio de A; entonces existe un vector x diferente de cero tal que Ax= x (I-A)x=0, como x diferente de cero (I-A) es singular det(I-A)=0
=0. Demo. Sólo si. Suponga que es un valor propio de A; entonces existe un vector x diferente de cero tal que Ax= x (I-A)x=0, como x diferente de cero (I-A) es singular det(I-A)=0.")
239
Valores y vectores propios
(si). Si det( I-A)=0 ( I-A) es singular ( I-A)x=0 tiene soluciones diferentes de cero, entonces existe x diferente de cero tal que Ax= x.
. Si det( I-A)=0 ( I-A) es singular ( I-A)x=0 tiene soluciones diferentes de cero, entonces existe x diferente de cero tal que Ax= x.")
240
Valores y vectores propios
Definición. La ecuación det(I-A)=0 se conoce como ecuación característica de A, y el polinomio p()=det(I-A) Observe que p()=(det(I-A)=a0+a1+...+an por el teorema fundamental del álgebra, cualquier polinomio de grado n tiene n raíces (contando multiplicidades). p()=(det(I-A)=a0+a1+...+an= (- 1)r1...(- m)rm Los número ri son la multiplicidad algebraica de los valores propios de 1,..., m.
=0 se conoce como ecuación característica de A, y el polinomio p()=det(I-A) Observe que p()=(det(I-A)=a0+a1+...+an por el teorema fundamental del álgebra, cualquier polinomio de grado n tiene n raíces (contando multiplicidades). p()=(det(I-A)=a0+a1+...+an= (- 1)r1...(- m)rm. Los número ri son la multiplicidad algebraica de los valores propios de 1,..., m.")
241
Valores y vectores propios
Teorema. Sea un valor propio de A y E={x|Ax= x}. Entonces E es un subespacio vectorial de Cn Nótese que E son las soluciones de (I-A)x=0, es decir el kernel de un operador lineal es un subespacio vectorial.
x=0, es decir el kernel de un operador lineal es un subespacio vectorial.")
242
Valores y vectores propios
Definición. Sean un valor propio de A. Entonces E se denomina espacio propio de A correspondiente a . Definición. Sea E el espacio propio de A debido a . A la dimensión de E se le conoce como multiplicidad geométrica de . Multiplicidad geométrica de =dim E=dim{Ker (I-A)}
}")
243
Valores y vectores propios
Ejemplos y procedimientos de cálculo. 2 -1 -4 4 -2 1 1 -1 2

244
Valores y vectores propios
Teorema. Sea un valor propio de A. Entonces se cumple que la multiplicidad geométrica de multiplicidad algebraica de

245
Valores y vectores propios
Teorema. Sean 1, 2, ..., m valores propios diferentes de A (n,n), donde mn y sean x1, x2,..., xm sus vectores propios correspondientes. Entonces x1, x2, ..., xm son linealmente independientes. Demostración. Suponga que {x1,...,xm} son L.D. y que xs es el primer vector L.D. de los previos xs=1x1+2x2+...+s-1xs-1 Multiplicando por A Axs= 1Ax1+2Ax2+...+s-1Axs-1
, donde mn y sean x1, x2,..., xm sus vectores propios correspondientes. Entonces x1, x2, ..., xm son linealmente independientes. Demostración. Suponga que {x1,...,xm} son L.D. y que xs es el primer vector L.D. de los previos. xs=1x1+2x2+...+s-1xs-1. Multiplicando por A. Axs= 1Ax1+2Ax2+...+s-1Axs-1.")
246
Valores y vectores propios
sxs= 1 1 x1+2 2 x2+...+s-1 s-1 xs-1 Restando ecuaciones y multiplicando por s se tiene 0=1(1-s)x1+2 (2-s) x2+...+s-1 (s-1-s)xs-1 Como xs es el primer vector L.D. entonces 1(1-s)=2 (2-s)=...=s-1 (s-1-s)=0 como is i=0 xs=0, lo cual contradice la suposición las vectores son L.I.
x1+2 (2-s) x2+...+s-1 (s-1-s)xs-1. Como xs es el primer vector L.D. entonces. 1(1-s)=2 (2-s)=...=s-1 (s-1-s)=0. como is i=0 xs=0, lo cual contradice la suposición las vectores son L.I.")
247
Valores y vectores propios
Teorema. La matriz A (n,n) tiene n vectores propios L.I. ssi la multiplicidad geométrica de cada valor propio es igual a su multiplicidad algebraica. Tarea (Grossman, pag 545)
 tiene n vectores propios L.I. ssi la multiplicidad geométrica de cada valor propio es igual a su multiplicidad algebraica. Tarea (Grossman, pag 545)")
248
Valores y vectores propios
Definición. Sea F(x)=a0+a1x+a2x2+...+anxn un polinomio y A una matriz cuadrada Se define el polinomio f(x) en la matriz A como: F(A)=a0I+a1A+a2A2+...+anAn Sy f(A) es igual a la matriz cero, entonces se dice que A es raíz (o cero) del polinomio f(x). Sea F() (n,n) una matriz polinomial en la variable , i.e. F()=F0+F1+...+Fmm= F()=F0+F1+...+mFm donde F0, F1,...,Fm son matrices cuadradas reales.
=a0+a1x+a2x2+...+anxn un polinomio y A una matriz cuadrada. Se define el polinomio f(x) en la matriz A como: F(A)=a0I+a1A+a2A2+...+anAn. Sy f(A) es igual a la matriz cero, entonces se dice que A es raíz (o cero) del polinomio f(x). Sea F() (n,n) una matriz polinomial en la variable , i.e. F()=F0+F1+...+Fmm= F()=F0+F1+...+mFm. donde F0, F1,...,Fm son matrices cuadradas reales.")
249
Valores y vectores propios
Se dice que F() es de orden n; y si Fm0, entonces F() es de grado m. Además F() se dice regular si det(Fm)0 Definicion. Sean F() y G() matrices polinomiales de orden n., y G() es regular. Las matrices polinomiales Q() y R() se conocen como cociente derecho y residuo derecho respectivamente de F() dicidida por G() si F()= Q() G() + R() y si el grado de R() es menor que el grado de G() [R() puede ser cero]
 es de orden n; y si Fm0, entonces F() es de grado m. Además F() se dice regular si det(Fm)0. Definicion. Sean F() y G() matrices polinomiales de orden n., y G() es regular. Las matrices polinomiales Q() y R() se conocen como cociente derecho y residuo derecho respectivamente de F() dicidida por G() si. F()= Q() G() + R() y si el grado de R() es menor que el grado de G() [R() puede ser cero]")
250
Valores y vectores propios
De manera similar se pueden definir el cociente izquierdo y residuo izquierdo Sea A (n,n) y denota F(A) la evaluación por la derecha de A en la matriz polinomial F() , esto es, si F()=F0+F1+...+Fmm= F()= F0+F1A+...+FmAm
 y denota F(A) la evaluación por la derecha de A en la matriz polinomial F() , esto es, si. F()=F0+F1+...+Fmm= F()= F0+F1A+...+FmAm.")
251
Valores y vectores propios
Teorema. Si la matriz polimial F() es dividida por la derecha por la matriz (I-A) entonces el residuo es F(A), y si es dividida por la izquierda por (I-A) entonces el resiudo es F’(A) (por la izquierdA). Demostración. Tarea. (teorema generalizado de Bezout, Grantmatcher, pag 81)
 es dividida por la derecha por la matriz (I-A) entonces el residuo es F(A), y si es dividida por la izquierda por (I-A) entonces el resiudo es F’(A) (por la izquierdA). Demostración. Tarea. (teorema generalizado de Bezout, Grantmatcher, pag 81)")
252
Valores y vectores propios
Corolario. La matriz polinomial F() es divisible por la derecha por la matriz (I-A) sin residuo (R()=0) ssi F(A)=0 (De manera similar se puede hacer por la izquierda) Teorema (Cayley-Hamilton). Toda matriz A (n,n) es raíz de su polinomio característico. Demostración. P()=det(I-A)=a0+a1+...+n Hay que mostrar que P(A)=0
 es divisible por la derecha por la matriz (I-A) sin residuo (R()=0) ssi F(A)=0. (De manera similar se puede hacer por la izquierda) Teorema (Cayley-Hamilton). Toda matriz A (n,n) es raíz de su polinomio característico. Demostración. P()=det(I-A)=a0+a1+...+n. Hay que mostrar que P(A)=0.")
253
Valores y vectores propios
de teoremas previos (I-A)adj(I-A)=det(I-A)I=[adj(I-A)](I-A) Lo cual puede verse como P()=(I-A)Q()=Q()(I-A) donde Q()=adj(I-A) es una matriz polinomial en y P()=det(I-A)I=a0I+a1I+...+nI como P() es divisible por la derecha y por la izquierda por (I-A) sin residuos, entonces P(A)=a0I+a1AI+...+AnI
adj(I-A)=det(I-A)I=[adj(I-A)](I-A) Lo cual puede verse como. P()=(I-A)Q()=Q()(I-A) donde Q()=adj(I-A) es una matriz polinomial en y. P()=det(I-A)I=a0I+a1I+...+nI. como P() es divisible por la derecha y por la izquierda por (I-A) sin residuos, entonces. P(A)=a0I+a1AI+...+AnI.")
254
Valores y vectores propios
Definición. Se dice que el polinomio F() es un polinomio aniquilador de la matriz A (n,n) si F(A)=0 (p.e. el polinomio característico de A) Definición. Al polinomio aniquilador mónico Q() de A de menor grado se le conoce como polinomio mínimo de A.
 es un polinomio aniquilador de la matriz A (n,n) si F(A)=0. (p.e. el polinomio característico de A) Definición. Al polinomio aniquilador mónico Q() de A de menor grado se le conoce como polinomio mínimo de A.")
255
Diagonalización de matrices
Definición. Se dice que A (n,n) es diagonalizable (bajo similaridad) si existe una matriz no singular P tal que P-1AP es diagonal
 es diagonalizable (bajo similaridad) si existe una matriz no singular P tal que P-1AP es diagonal.")
256
Diagonalización de matrices
Teorema. La matriz A (n,n) es diagonalizable ssi tiene n vectores propios linealmente independientes Si 1, 2, ..., n son los valores propios de A y los vectores propios x1, x2, ..., xn correspondientes a estos valores propios son linealmente independientes, entonces P-1AP=diag{1, 2, ..., n}, donde P=[x1 x Xn]
 es diagonalizable ssi tiene n vectores propios linealmente independientes. Si 1, 2, ..., n son los valores propios de A y los vectores propios x1, x2, ..., xn correspondientes a estos valores propios son linealmente independientes, entonces P-1AP=diag{1, 2, ..., n}, donde P=[x1 x2 ... Xn]")
257
Diagonalización de matrices
Demostración. (si) Suponga que A tiene n vectores propios L.I. x1 x xn correspondientes a los valores propios 1, 2, ..., n (algunos pueden ser repetidos). Sea P la matriz [x1 x xn], entonces AP= [Ax1 Ax Axn]= [1x1 2x nxn] = [x1 x xn]diag{1, 2, ..., n} =Pdiag{1, 2, ..., n} Como P es no singular tiene inversa P-1AP=diag{1, 2, ..., n}
 Suponga que A tiene n vectores propios L.I. x1 x2 ... xn correspondientes a los valores propios 1, 2, ..., n (algunos pueden ser repetidos). Sea P la matriz [x1 x2 ... xn], entonces. AP= [Ax1 Ax2 ... Axn]= [1x1 2x2 ... nxn] = [x1 x2 ... xn]diag{1, 2, ..., n} =Pdiag{1, 2, ..., n} Como P es no singular tiene inversa. P-1AP=diag{1, 2, ..., n}")
258
Diagonalización de matrices
Demostración. (sólo si) Suponga que existe una matriz no singular P tal que P-1AP=diag{1, 2, ..., n} AP=Pdiag{1, 2, ..., n} Para cada xi de P se tiene que: Axi= ix xi es vector propio de A i es valor propio de A P es no singular A tiene n vectores propios L.I.
 Suponga que existe una matriz no singular P tal que. P-1AP=diag{1, 2, ..., n} AP=Pdiag{1, 2, ..., n} Para cada xi de P se tiene que: Axi= ix. xi es vector propio de A i es valor propio de A. P es no singular A tiene n vectores propios L.I.")
259
Diagonalización de matrices
Corolario. La matriz A (n,n) es diagonalizable ssi la multiplicidad geométrica de cada valor propio es igual a su multiplicidad algebraica. En particular A es diagonalizable si todos sus valores propios son distintos
 es diagonalizable ssi la multiplicidad geométrica de cada valor propio es igual a su multiplicidad algebraica. En particular A es diagonalizable si todos sus valores propios son distintos.")
260
Diagonalización de matrices
Teorema. Si A y B son similares, entonces tienen el mismo polinomio característico, y por consiguiente los mismos valores propios. Demo. det(I-B)=det(I-P-1AP)=det(P-1P-P-1AP)=det(P-1(I-A)P)=det(P-1)det(I-A)det(P)=det(I-A)
=det(I-P-1AP)=det(P-1P-P-1AP)=det(P-1(I-A)P)=det(P-1)det(I-A)det(P)=det(I-A)")
261
Diagonalización de matrices
Teorema. Si A y B son similares, i.e. existe una matriz no singular tal que B=P-1AP. Entonces: i) Bk=P-1AkP ii)Si f(x)=a0+a1x+...+anxn es un polinomio cualquiera, entonces f(B)=P-1f(A)P
 Bk=P-1AkP. ii)Si f(x)=a0+a1x+...+anxn es un polinomio cualquiera, entonces f(B)=P-1f(A)P.")
262
Diagonalización de matrices
Demo Bk=(P-1AP)k= =(P-1AP)(P-1AP)...(P-1AP)= P-1AkP ii)Si f(B)=a0I+a1(P-1AP)+...+an(P-1AnP)= =P-1(a0+a1A+...+anAn)P=P-1f(A)P
k= =(P-1AP)(P-1AP)...(P-1AP)= P-1AkP. ii)Si f(B)=a0I+a1(P-1AP)+...+an(P-1AnP)= =P-1(a0+a1A+...+anAn)P=P-1f(A)P.")
263
Diagonalización de matrices
1 2 3
264
Diagonalización de matrices
Tiene dos propio valores 1=1, 2=2 con multiplicidades algebraicas 2 y 1 y geométricas 1 y 1 respectivamente no es posible diagonalizar A, pero ¿es posible encontrar una bse donde A sea casi diagonal?

265
Diagonalización de matrices
Definición.- Un vector v es llamado un vector propio generalizado de rango k de A asociado con iff (A- I)kv=0 (A- I)k-1v0 Note que si k=1 coincide con vector propio
kv=0. (A- I)k-1v0. Note que si k=1 coincide con vector propio.")
266
Diagonalización de matrices
Definición.- vk=v vector propio generalizado vk-1=(A-I)v=(A-I)vk vk-2=(A-I)2v=(A-I)vk-1 ... v1=(A-I)k-1v=(A-I)v2
v=(A-I)vk. vk-2=(A-I)2v=(A-I)vk v1=(A-I)k-1v=(A-I)v2.")
267
Diagonalización de matrices
... vk-2=(A-I)2v=(A-I)vk-1 Entonces para 1ik vi es un vector propio generalizado de rango i, por ejemplo (A-I)k-2vk-2=(A-I)k-2(A-I)2v=(A-I)kv=0 (A- I)k-1vk-2=(A-I)k-1v0
2v=(A-I)vk-1. Entonces para 1ik vi es un vector propio generalizado de rango i, por ejemplo. (A-I)k-2vk-2=(A-I)k-2(A-I)2v=(A-I)kv=0. (A- I)k-1vk-2=(A-I)k-1v0.")
268
Diagonalización de matrices
Definición.- Lleamaremos a los vectores {v1, v2,...,vk} una cadena de vectores propios generalizados si vk es un vector propio generalizado que dio origen a todos los demás vectores

269
Diagonalización de matrices
Teorema. El conjunto de vectores propios generalizados v1, v2, ..., vk definidos anteriormente es L.I. Demostración.- Suponer que v1, v2, ..., vk son L.D., entonces existen soluciones diferentes de la trivial a: 1v1+2v2+...+kvk=0 Multiplicando por (A-I)k-1 y observando que vi=vk-(k-i)=(A-I)k-iv por definición
k-1 y observando que. vi=vk-(k-i)=(A-I)k-iv por definición.")
270
Diagonalización de matrices
entonces (A-I)k-1vi=(A-I)2k-(i+1)v=0 para i=1,2,...,k-1 k(A-I)k-1vk=0 y sabiendo de la def. de vector propio generalizado que (A-I)k-1vk0, k=0 Aplicando ahora (A-I)k-2 se demuestra que k-1=0 Siguiendo esto se tiene que i=0, lo que contradice la suposición. son L.I.
k-1vi=(A-I)2k-(i+1)v=0. para i=1,2,...,k-1. k(A-I)k-1vk=0. y sabiendo de la def. de vector propio generalizado que (A-I)k-1vk0, k=0. Aplicando ahora (A-I)k-2 se demuestra que k-1=0. Siguiendo esto se tiene que i=0, lo que contradice la suposición. son L.I.")
271
Diagonalización de matrices
Teorema: Los vectores propios generalizados de A asociados con diferentes propio valores son L.I. Demostración. Sea v vector propio generalizado 1 vi=(A-1I)vi+1=(A-1I)k-iv Sea u vector propio generalizado 2 ui=(A-2I)ui+1=(A-2I)l-iu Del teorema anterior los vi son L.I. y los ui son L.I, falta ver que {ui}, {vi} son L.I.
vi+1=(A-1I)k-iv. Sea u vector propio generalizado 2. ui=(A-2I)ui+1=(A-2I)l-iu. Del teorema anterior los vi son L.I. y los ui son L.I, falta ver que {ui}, {vi} son L.I.")
272
Diagonalización de matrices
Suponer que vi es L.D. en {u1,...,ul} vi=1u1+2u2+...+lul Aplicando (A-1I)i 0= (A-1I)i [1u1+2u2+...+lul ] Ahora aplicando (A-2I)l-1 y observando que (A-2I)l-1 (A-1I)i = (A-1I)i (A-2I)l-1 y el hecho de que (A-2I)l-1 uj=0, j=1,2,..., l-1 0=l(A-1I)i(A-2I)l-1ul=l(A-1I)iu1 Como (A-2I)u1=0 o Au1=2u1, la ecuación anterior se reduce a l(2-1)iu1=0
i. 0= (A-1I)i [1u1+2u2+...+lul ] Ahora aplicando (A-2I)l-1 y observando que. (A-2I)l-1 (A-1I)i = (A-1I)i (A-2I)l-1. y el hecho de que (A-2I)l-1 uj=0, j=1,2,..., l-1. 0=l(A-1I)i(A-2I)l-1ul=l(A-1I)iu1. Como (A-2I)u1=0 o Au1=2u1, la ecuación anterior se reduce a. l(2-1)iu1=0.")
273
Diagonalización de matrices
se reduce a l(2-1)iu1=0 lo cual implica que l=0. Un procedimiento similar llega a la conclusión de que todos los i=0, lo que contradice la suposición y los vectores son L.I.
iu1=0. lo cual implica que l=0. Un procedimiento similar llega a la conclusión de que todos los i=0, lo que contradice la suposición y los vectores son L.I.")
274
Diagonalización de matrices
Teorema. Sean u y v propio vectores de rango o y l respectivamente, asociados con el mismo valor propio . vi=(A-I)vi+1=(A-1I)k-iv ui=(A-I)ui+1=(A-2I)l-iu Si u1 y v1 son L.I. las cadenas son L.I.
vi+1=(A-1I)k-iv. ui=(A-I)ui+1=(A-2I)l-iu. Si u1 y v1 son L.I. las cadenas son L.I.")
275
Diagonalización de matrices
El tratar de construir la forma casi diagonal (diagonal por bloques o forma de Jordan) se convierte en un proceso iterativo. 1.- se calculan propio valores y propio vectores de la forma tradicional. 2.- Si la multiplicidad algebraica es mayor que la geométrica tratar de encontrar una cadena lo suficientemente larga de vectores generalizados para construir los vectores L.I. independientes faltantes, de lo contrario construir cadenas más pequeñas hasta completarlos
 se convierte en un proceso iterativo. 1.- se calculan propio valores y propio vectores de la forma tradicional. 2.- Si la multiplicidad algebraica es mayor que la geométrica tratar de encontrar una cadena lo suficientemente larga de vectores generalizados para construir los vectores L.I. independientes faltantes, de lo contrario construir cadenas más pequeñas hasta completarlos.")
276
Matrices unitarias Si P es no singular B=P-1AP transformación de similaridad Sirven para cambio de bases Más conveniente si las bases son ortogonales y ortonormales Si {x1,...,xp} es un conjunto ortonormal xiTxi=1 y xiTxj=0 Si hacemos que P=[x1,...,xp] PTP=I o PT=P-1

277
Matrices unitarias Definición. Una matriz P (de reales) para la cual PT=P-1 tal que PTP=I, se dice ser unitaria. Teorema. a) P unitaria el conjunto de vectores columna es ortonormal b) P unitiaria |det(P)|=1 c) P unitaria <PX,Py>=<x,y> d) P unitaria si valor propio de P ||=1 Demo. Clara
 P unitaria el conjunto de vectores columna es ortonormal. b) P unitiaria |det(P)|=1. c) P unitaria <PX,Py>=<x,y> d) P unitaria si valor propio de P ||=1. Demo. Clara.")
278
Matrices unitarias Teorema.
Si B=P-1AP donde P es unitaria (se dice transformación de similaridad unitaria) todo lo que se vió de propiedades de similaridad sigue valiendo.
 todo lo que se vió de propiedades de similaridad sigue valiendo.")
279
Matrices unitarias Teorema. Si A es una matriz de pxp.
a) A es similar unitaria a una matriz triangular superior T; T=P-1AP con P unitaria y con los propiovalores de A en su diagonal principal. T es llamada la forma de Shur de A y la descomposición A=PTP-1= PTPT es la descomposición Shur de A. Demo. Si p=1 ya terminamos. Suponer que para p=k es cierto Para p=k+1 tenemos.
 A es similar unitaria a una matriz triangular superior T; T=P-1AP con P unitaria y con los propiovalores de A en su diagonal principal. T es llamada la forma de Shur de A y la descomposición A=PTP-1= PTPT es la descomposición Shur de A. Demo. Si p=1 ya terminamos. Suponer que para p=k es cierto. Para p=k+1 tenemos.")
280
Matrices unitarias 1 es el propio valor asociado a x1, podemos normalizar este vector para que ||x1||2=1 Entonces x1 entra a la base que ya teníamos de propiovectores ortonormalizados {w1,...,wk} si no es otronormal a esta base, aplicamos Gram-Schmidt y tenemos la nueva base {x1,w1,...,wk} U= [x1,w1,...,wk]=[x1,W] A’=UTAU=[x1,W]TA[x1,W]=[x1,W]T[Ax1 AW]= 1 x1TAW WTAW 1 bT C =

281
Matrices unitarias Definición. Una matriz A de pxp es normal si ATA=AAT Teorema. A normal D=PTAP, D es diagonal, y P es unitaria. Por tanto los propio vectores de A son p linealmente independientes

282
Matrices unitarias Veamos ahora el caso en que A=UVT, con U y V unitarias de pxp y qxq, es pxq casi cero, excepto en la diagonal que vale ii=i que es un real no negativo. 4 6 2 3 2 Así son

283
Matrices unitarias Claramente se tendría AV=U Avi=iui para 1imin(p,q), dende los ui, vi son las columnas de U y V respectivamente. Además ATA= (UVT)T (UVT)=VTUTUVT=V(T)VT donde T=D=VTATAV es diagonal de qxq que los propio vectores de ATA sirven para construir V y D tiene los valores propios D=T Similarmente para el caso AAT=U(T)UT en este caso D= T
T (UVT)=VTUTUVT=V(T)VT. donde T=D=VTATAV es diagonal de qxq. que los propio vectores de ATA sirven para construir V y D tiene los valores propios D=T Similarmente para el caso. AAT=U(T)UT en este caso D= T.")
284
Matrices unitarias Definición. A la descomposición que hemos venido manejando, A=UVT, se le conoce como descomposición en valores singulares de A. Viendo lo que hicimos para la descomposición de Schur, podemos ver que la descomposición en valores singulares siempre existe. Los valores singulares de A son los i, y el número de valores no cero es el rango de A. Los ui son los vetores singulares izquierdos y los vi los vectores singulares derechos relacionados con i.

285
1 9 2 A= ATA propiovalores 18 y 0. 1=18(1/2) y 2=0
Un par de vectores propios de ATA normalizados son v1=[1.71/ /2]T y v2=[1.71/ /2]T Entonces V=[V1 v2]

286
1 2 2 4 8 A= AAT= propiovalores 18 y 0. 1=18 y 2=0
Vectores propios de AAT normalizados son u1=[1/3 2/3 2/3]T u2=[(-2)51/2/5 51/2/5 0]T u3 =[(2)51/2/15 (4)51/2/15 (-1)51/2/3 ]T Entonces U=[u1 u2 u3]
51/2/5 51/2/5 0]T u3 =[(2)51/2/15 (4)51/2/15 (-1)51/2/3 ]T. Entonces U=[u1 u2 u3]")
287
1 2 2 4 8 A= AAT= 3(2)1/2
1/2")
288
Mínimos cuadrados Suponer que A=UVT, es la descomposición en valores singulares, donde A es de rango k. El problema es minimizar ||Ax-b||2 con respecto a x. ||Ax-b||2=||UVTx-b||2=||y-UTb||2 y=VTx ||Ax-b||2 es mínimo cra x ssi ||y-UTb||2 es mínimo cra y. ||y-b’||22=|1y1-b1’|2+...+|kyk-bk’|2+|bk+1’|2+...+|bp’|2 b’=UTb Es minimizado si yi=bi’/i

289
Mínimos cuadrados Entonces para ||Ax-b||2 con respecto a x.
Encontrar A=UVT Calcular b’=UTb Calcular yi=bi’/i para 1ik, yi=0 otro caso x0=Vy y=VTx ||Ax-b||2 es mínimo cra x ssi ||y-UTb||2 es mínimo cra y. ||y-b’||22=|1y1-b1’|2+...+|kyk-bk’|2+|bk+1’|2+...+|bp’|2 b’=UTb Es minimizado si yi=bi’/i

Presentaciones similares