Descargar la presentación
La descarga está en progreso. Por favor, espere

1
INTRODUCCION A LA BIOFISICA
Dr. Carlos Morales A. Cardiólogo Pediatra U.P.C.P. Hospital de Coquimbo

2
DEFINICION Rama de la biología que busca explicar fenómenos biológicos con los principios y métodos de la física. Es una ciencia reduccionista: Aspira a una explicación científica predecible de los fenómenos observados. Su fin adolece las misma limitaciones, y por tanto el mismo enfoque, que la física: Principios determinísticos en lo Macroscópico (Biomecánica). Principios estocásticos en lo Microscópico (Molecular).
. Principios estocásticos en lo Microscópico (Molecular).")
3
TEORIA DE SISTEMAS DEFINICIÓN: Agregado de elementos entre límites reales e imaginarios. SISTEMA FÍSICO: Cantidad de materia incluída entre tales límites. SISTEMA BIOLÓGICO: Agregado de materia dispuesta de tal forma que obliga a considerar los procesos que en él ocurren como parte del sistema. Ej: la célula.

4
RAMAS DE LA BIOFISICA Biomecánica. Bioelectricidad. Bioenergética.
Bioacústica. Biofotónica. Radiobiología.

5
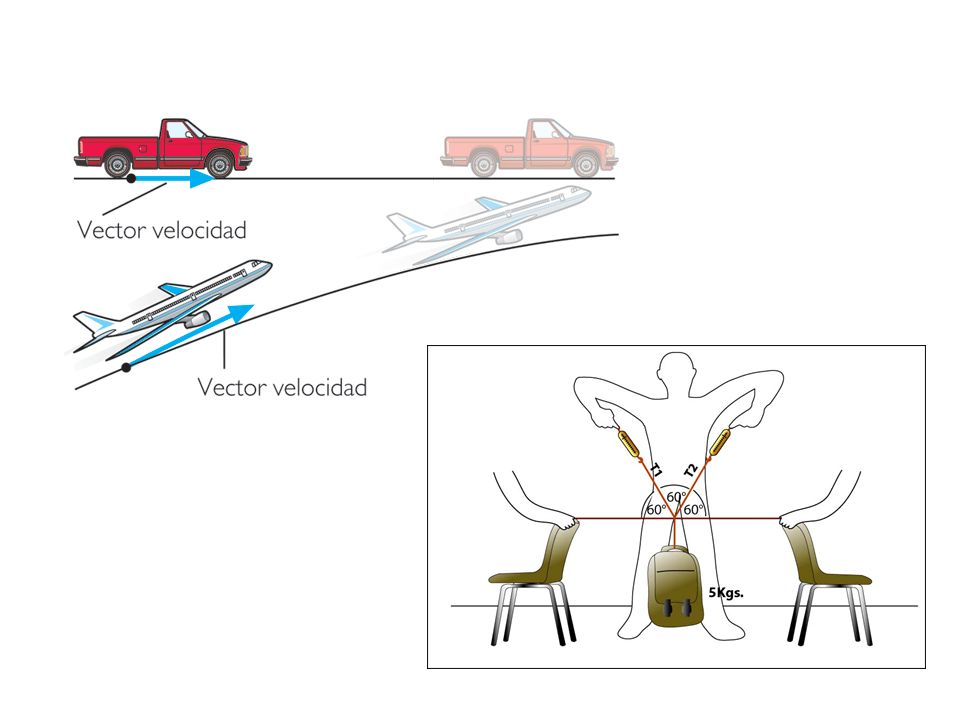
VECTORES

6
DEFINICIÓN Herramienta geométrica utilizada para representar una magnitud física que por esencia incluye en su definición, necesaria y simultáneamente, más de una dimensión. Módulo: o longitud o cantidad Dirección: orientación en un sistema de referencia (Ej. Coordenadas cartesianas). Sentido: Referido a qué extremo apunta (Ej: (+) o (-)). Hay magnitudes que se definen sólo por su valor numérico: MAGNITUD ESCALAR (Ej: Temperatura, longitud, tiempo). Otras deben ser MAGNITUDES VECTORIALES (Ej: velocidad, fuerza). Toda magnitud que deriva de una magnitud vectorial es vectorial, aún cuando sea el producto entre escalar x vectorial (Ej: velocidad → aceleración → fuerza).
. Sentido: Referido a qué extremo apunta (Ej: (+) o (-)). Hay magnitudes que se definen sólo por su valor numérico: MAGNITUD ESCALAR (Ej: Temperatura, longitud, tiempo). Otras deben ser MAGNITUDES VECTORIALES (Ej: velocidad, fuerza). Toda magnitud que deriva de una magnitud vectorial es vectorial, aún cuando sea el producto entre escalar x vectorial (Ej: velocidad → aceleración → fuerza).")
8
SUMA Y RESTA DE VECTORES

9
A=AX+AY

10
LEYES DEL MOVIMIENTO

11
LEYES DEL MOVIMIENTO (LEYES DE NEWTON)
PRIMERA LEY: DE LA INERCIA. Todo cuerpo en reposo tiende a permanecer en reposo y un cuerpo en movimiento tiende al movimiento rectilíneo uniforme. SEGUNDA LEY: DE LA MASA. Un cambio en la velocidad de un cuerpo (aceleración) dependerá directamente de la fuerza aplicada e inversamente de su masa (inercia). |F| = m|a| |a| = _1_ x |F| m
 dependerá directamente de la fuerza aplicada e inversamente de su masa (inercia). |F| = m|a| |a| = _1_ x |F| m.")
12
LEYES DEL MOVIMIENTO (LEYES DE NEWTON)
TERCERA LEY: ACCION Y REACCION Si un cuerpo ejerce una fuerza sobre otro, el segundo ejerce una fuerza de igual magnitud pero con sentido y dirección opuestos La forma más sencilla de aplicar estos conceptos es analizando el movimiento en una sola dimensión, de modo de observar las relaciones entre tiempo y distancia y comprender los conceptos velocidad y aceleración

13
MOVIMIENTO EN UNA DIMENSIÓN

14
CINEMATICA A B C D E MOVIMIENTO RECTILINEO UNIFORME:
En una trayectoria recta a tiempos iguales se recorre distancias iguales. A B C D E para t = segundo. AB = BC = CD = DE = K K = velocidad = |v| = s/t. ya que |v| es constante, el espacio recorrido dependerá del tiempo s sf si α ti tf t Velocidad será la pendiente del gráfico, por tanto será Δs/ Δt, es decir tan α

15
CINEMATICA MOVIMIENTO RECTILINEO UNIFORMEMENTE VARIADO:
Cuando no se cumple que s = |V| t, aparece el concepto de aceleración, que no es otra cosa que la variación en la velocidad de un móvil. Dicho de otro modo, en el MRU la aceleración sería 0. La primera ley describe MRU, la segunda ley describe MRUV Graficando todo lo anterior, se tiene que: MRU S |v| t t MRUV S |V| |a| |V| |a| t t t

16
MOMENTUM MOMENTUM: Se define como la cantidad de movimiento que contiene un cuerpo, entendido el movimiento como una magnitud vectorial. Matemáticamente, MOMENTUM = m |v| Su concepto deriva del concepto de Impulso. IMPULSO: Toda fuerza actúa sobre un cuerpo por un tiempo limitado. El impulso es el producto de esta fuerza por el tiempo. IMPULSO = |F| t = m |a| t = m |v|

17
MOMENTUM LEY DE CONSERVACION DEL MOMENTUM
En un sistema aislado, la cantidad de movimiento de las partículas que lo componen es constante. De modo que ∑ m|v| = K, o sea: m1|v1| + m2|v2| + …= K Es con el momentum cuando aplicamos la tercera ley de Newton.

18
MOVIMIENTO EN 2 DIMENSIONES MOVIMIENTO ROTATORIO O CIRCULAR

19
MOVIMIENTO CIRCULAR UNIFORME
El Movimiento Circular Uniforme es aquel en el que el móvil se desplaza en una trayectoria circular (una circunferencia o un arco de la misma) a una velocidad constante. Se consideran dos velocidades: La rapidez con que varía el ángulo en el giro. La rapidez del desplazamiento del móvil
 a una velocidad constante. Se consideran dos velocidades: La rapidez con que varía el ángulo en el giro. La rapidez del desplazamiento del móvil.")
20
Velocidad angular en movimiento circular uniforme
la frecuencia es la cantidad de vueltas sobre el tiempo, la velocidad angular también se puede expresar como: Velocidad angular en movimiento circular uniforme Es la rapidez con la que varía el ángulo en el tiempo y se mide en radianes / segundos. (2 π [radianes] = 360°) Por lo tanto si el ángulo es de 360 grados (una vuelta) y se realiza: En una vuelta por segundo, la velocidad angular es: 2 π [rad / s]. En dos vueltas por segundo = 4 π [rad / s]. En media vuelta en 2 segundos es 1/2 π [rad / s]. Sintetizando, la velocidad angular se calcula como la variación del ángulo sobre la variación del tiempo: Como la frecuencia es cantidad vueltas/tiempos:
 Por lo tanto si el ángulo es de 360 grados (una vuelta) y se realiza: En una vuelta por segundo, la velocidad angular es: 2 π [rad / s]. En dos vueltas por segundo = 4 π [rad / s]. En media vuelta en 2 segundos es 1/2 π [rad / s]. Sintetizando, la velocidad angular se calcula como la variación del ángulo sobre la variación del tiempo: Como la frecuencia es cantidad vueltas/tiempos:")
21
VELOCIDAD TANGENCIAL Es la velocidad del móvil (distancia que recorre en el tiempo). Por lo tanto para distintos radios y a la misma velocidad angular, el móvil se desplaza a distintas velocidades tangenciales. A mayor radio y a la misma cantidad de vueltas por segundo, el móvil recorre una trayectoria mayor, porque el perímetro de esa circunferencia es mayor y por lo tanto la velocidad tangencial también es mayor. Por ejemplo si se recorre todo el perímetro de una circunferencia de radio 5 metros en 1 segundo, la velocidad tangencial es: La ecuación que se utiliza para calcular la velocidad tangencial se expresa como la velocidad angular por el radio:
. Por lo tanto para distintos radios y a la misma velocidad angular, el móvil se desplaza a distintas velocidades tangenciales. A mayor radio y a la misma cantidad de vueltas por segundo, el móvil recorre una trayectoria mayor, porque el perímetro de esa circunferencia es mayor y por lo tanto la velocidad tangencial también es mayor. Por ejemplo si se recorre todo el perímetro de una circunferencia de radio 5 metros en 1 segundo, la velocidad tangencial es: La ecuación que se utiliza para calcular la velocidad tangencial se expresa como la velocidad angular por el radio:")
22
POSICIÓN RESPECTO DEL TIEMPO
La ecuación para determinar la posición respecto del tiempo, utilizando la velocidad angular, es similar a la de mru, pero en vez de distancias utilizamos los ángulos.

23
ACELERACIÓN CENTRÍPETA
La aceleración centrípeta se calcula como la velocidad tangencial al cuadrado sobre el radio o cómo la velocidad angular por la velocidad tangencial:

24
Frecuencia y periodo Frecuencia
La frecuencia mide la cantidad de vueltas que se dan en un período de tiempo (normalmente un segundo). La unidad más común es el Hertz. Un Hertz equivale a una vuelta en un segundo (1 / s). Período El período mide el tiempo que se tarde en dar una vuelta completa y se mide en segundos. Es la inversa de la frecuencia. De la misma forma la frecuencia se puede calcular como la inversa del período.
. La unidad más común es el Hertz. Un Hertz equivale a una vuelta en un segundo (1 / s). Período. El período mide el tiempo que se tarde en dar una vuelta completa y se mide en segundos. Es la inversa de la frecuencia. De la misma forma la frecuencia se puede calcular como la inversa del período.")
25
TRABAJO Y ENERGIA EN MECANICA

26
TRABAJO Y ENERGIA MECANICA
En mecánica evidenciamos un trabajo cuando observamos el desplazamiento de un móvil tras aplicarle una determinada fuerza. Es decir: W = |F| x d = m|a|d Fcosᶿ = Fuerza neta que nos interesa (paralela y con el sentido del desplazamiento). d = deplazamiento. ᶿ = ángulo entre las direcciones de la fuerza aplicada y la que nos interesa.
. d = deplazamiento. ᶿ = ángulo entre las direcciones de la fuerza aplicada y la que nos interesa.")
27
TRABAJO Y ENERGIA MECANICA
Calcular el trabajo necesario para desplazar una caja de 40 Kg por 30 m. El roce ofrece resistencia de 20 N. La fuerza ejercida, 100 N. Hay 4 fuerzas implicadas: Fr = Roce N = Normal mg = peso Fp = fuerza constante. N y mg son perpendiculares, por lo que su W teórico es 0 (cos 90°) Wp = Fpxcos (usando x en lugar de d) = (100 N)(30 m)cos60º = 1500 J. Wr = Frxcos180º = (20 N)(30 m)(-1) = -600 J. W neto = Fpxcos60° – Frxcos180° = 1500 J J = 900 J.
 Wp = Fpxcos (usando x en lugar de d) = (100 N)(30 m)cos60º = 1500 J. Wr = Frxcos180º = (20 N)(30 m)(-1) = -600 J. W neto = Fpxcos60° – Frxcos180° = 1500 J J = 900 J.")
28
TRABAJO Y ENERGIA MECANICA
Capacidad para efectuar un trabajo. Hay 2 tipos: E. Potencial y E. Cinética. ENERGÍA POTENCIAL: Capacidad calculable a partir de las condiciones de un marco de referencia dado. Ejemplos: E. POTENCIAL GRAVITACIONAL EPG = mgh (m= masa, g= 9,8, h= altura) E. POTENCIAL ELASTICA EPE = ½ Kx2
 E. POTENCIAL ELASTICA. EPE = ½ Kx2.")
29
ENERGIA CINETICA: Equivale al Wneto realizado, es decir el trabajo neto es igual al cambio en la energía cinética que tiene un cuerpo: Wneto = Δ EC Por otro lado, sabemos que en un grafico velocidad / tiempo, la pendiente de la recta (la aceleración) corresponde a la hipotenusa, es decir |Vf|2-|Vi|2 = 2ad. Por ende, |Vf|2 = |Vi| ad Se tiene que W = Fd = mad = m[(Vf2 - Vi2) / 2d]d O sea, W = ½mVf2 - ½mVi2 Llevando Δv a una cantidad infinitesimal (derivando), se tiene que: Ec = ½mv2.
 corresponde a la hipotenusa, es decir. |Vf|2-|Vi|2 = 2ad. Por ende, |Vf|2 = |Vi|2 + 2ad. Se tiene que. W = Fd = mad = m[(Vf2 - Vi2) / 2d]d. O sea, W = ½mVf2 - ½mVi2. Llevando Δv a una cantidad infinitesimal (derivando), se tiene que: Ec = ½mv2.")
30
ESTATICA - ELASTICIDAD

31
LEY DE HOOKE “La fuerza que devuelve un resorte a su posición de equilibrio es proporcional al valor de la distancia que se desplaza de esa posición” F = K Δx F : Fuerza aplicada al resorte K : Constante de proporcionalidad Δx : Variación de la longitud del resorte

32
La deformación elástica que sufre un cuerpo es proporcional a la fuerza que produce tal deformación siempre que no se sobrepase el límite de elasticidad. Cada material tendrá su propia relación esfuerzo/deformación (módulo elasticidad, K) y su propio límite de elasticidad. Ello estará determinado por las fuerzas de atracción/repulsión de las moléculas o átomos que constituyan dicho material.
 y su propio límite de elasticidad. Ello estará determinado por las fuerzas de atracción/repulsión de las moléculas o átomos que constituyan dicho material.")
33
ENERGIA POTENCIAL ELASTICA
La energía potencial elástica será el área bajo la curva del módulo calculado para el material dentro del límite de elasticidad. Esto implica que el trabajo para desplazar un resorte (dentro del rango explicitado) será proporcional al cuadrado de la distancia que desplacemos el resorte, o sea: W = ½ K x2
 será proporcional al cuadrado de la distancia que desplacemos el resorte, o sea: W = ½ K x2.")
34
ENERGIA POTENCIAL ELASTICA
El ejemplo anterior muestra lo que ocurre en un material “ideal”, donde la fuerza es constantemente proporcional a la distancia (resorte ideal). Otros materiales tienen una posición de equilibrio a partir del cual varía la fuerza necesaria a aplicar (Ej: Músculo). En estos casos vemos que de todos modos hay una curva y un área bajo la curva por tanto es posible calcular ambas sea derivando la superficie o integrando la curva.
. Otros materiales tienen una posición de equilibrio a partir del cual varía la fuerza necesaria a aplicar (Ej: Músculo). En estos casos vemos que de todos modos hay una curva y un área bajo la curva por tanto es posible calcular ambas sea derivando la superficie o integrando la curva.")
Presentaciones similares



>")















