Descargar la presentación
La descarga está en progreso. Por favor, espere

1
CINEMÁTICA (I) Estudio del movimiento Aránzazu González Mármol
I.E.S. Orden de Santiago

2
0. Herramientas matemáticas para la Física.
0.1. Álgebra: ecuaciones de 2º grado y sistemas de ecuaciones. 0.2. Razones trigonométricas. 0.3. Geometría. Teorema de Pitágoras. Ecuación de una recta. Ecuación de una parábola. 0.4. Magnitudes vectoriales. Representación analítica ý gráfica de un vector. Módulo de un vector. Suma de vectores. Componentes de un vector. Resta de vectores. INTRODUCCIÓN AL TEMA 1. Concepto de movimiento.

3
2. Magnitudes que caracterizan el movimiento.
2.1. Vector de posición. 2.2. Vector desplazamiento. 2.3. Tiempo. 2.4. Velocidad. Velocidad y celeridad media. Velocidad instantánea. * Herramientas matemáticas: derivación. 2.5. Aceleración. Aceleración media. Aceleración instantánea. 3. Clasificación de los movimientos. 4. Tipos de movimientos. 4.1. MRU. 4.2. MRUA. Lanzamiento vertical y caída libre

4
4.3. Composición de movimientos.
4.4. Movimiento parabólico u oblicuo. 4.5. Tiro horizontal. 4.6. Movimientos circulares: MCU y MCUA. Magnitudes circulares. MCU. MCUA.

5
0. HERRAMIENTAS MATEMÁTICAS PARA LA FÍSICA
Las leyes de la Física y de la Química se expresan mediante ecuaciones o fórmulas matemáticas. Ello se debe a que el lenguaje matemático es conciso, preciso y universal. 0.1. Álgebra: ecuación de 2º grado y sistema de ecuaciones Para resolver la ecuación matemática se debe aplicar la expresión: , en la cual en ocasiones no tienen sentido físico los dos resultados posibles. Por Ejemplo, si obtenemos un tiempo negativo, este lo tendremos que rechazar. Recordemos, además, que los sistemas de ecuaciones siempre se pueden resolver si tenemos tantas ecuaciones como incógnitas y que existen tres métodos para resolverlos: igualación, sustitución o reducción.

6
0.2. Razones trigonométricas
0.3. Geometría. Teorema de Pitágoras Para un triángulo rectángulo:

7
Ecuación de una recta La ecuación general de una recta es: y= mx + n n: punto de corte de la recta con el eje Y. m: pendiente de la recta: Ecuación de una parábola La ecuación general de una parábola: y = ax2 + bx + c su vértice se encuentra en el punto –b/2 y está dirigida hacia arriba si a<0 y hacia abajo si a>0

8
0.4. Magnitudes vectoriales
Para distinguir las magnitudes escalares (sólo un número) de una magnitud vectorial (número, dirección y sentido) representamos estas últimas colocando una flecha encima del signo de la magnitud . En los libros se permite distinguirlas poniendo las magnitudes vectoriales en negrita v, a, F, como haremos aquí. Un vector es un segmento orientado en el espacio cuya longitud es el valor numérico, su dirección la recta a la que pertenece el segmento y su sentido es el indicado por la punta de la flecha situada en uno de sus extremos. El otro extremo es el origen del vector o punto de aplicación.
 de una magnitud vectorial. (número, dirección y sentido) representamos estas últimas colocando una flecha encima. del signo de la magnitud . En los libros se permite distinguirlas poniendo las magnitudes. vectoriales en negrita v, a, F, como haremos aquí. Un vector es un segmento orientado en el espacio cuya longitud es el valor numérico, su. dirección la recta a la que pertenece el segmento y su sentido es el indicado por la punta de la. flecha situada en uno de sus extremos. El otro extremo es el origen del vector o punto de aplicación.")
9
0.4.1. Representación analítica y gráfica de un vector
Para representar un vector necesitamos sus tres coordenadas (x, y, z) Nosotros en este curso sólo utilizaremos planos, por lo que sólo necesitamos sus dos coordenadas (x, y). Tomando un eje de coordenadas XY, si queremos representar el vector v (3, 4) El vector se obtiene uniendo el origen de coordenadas con el punto del espacio a representar y su sentido desde el origen a dicho punto Para representarlo analíticamente es necesario definir los llamados vectores unitarios. Un vector unitario u es un vector de módulo unidad y cuya dirección, sentido y punto de aplicación coincide con el vector v, de tal manea que la relación entre ambos es v= v.u.
 Nosotros en este curso sólo utilizaremos planos, por lo que sólo. necesitamos sus dos coordenadas (x, y). Tomando un eje de coordenadas XY, si queremos representar. el vector v (3, 4) El vector se obtiene uniendo el origen de coordenadas con el punto. del espacio a representar y su sentido desde el origen a dicho punto. Para representarlo analíticamente es necesario definir los. llamados vectores unitarios. Un vector unitario u es un. vector de módulo unidad y cuya dirección, sentido y punto. de aplicación coincide con el vector v, de tal manea que la. relación entre ambos es v= v.u.")
10
En Física hay tres vectores unitarios asignados a cada uno de los
ejes coordenados X, Y, Z, siendo estos respectivamente: i, j, k. Analíticamente Gráficamente Módulo de un vector El módulo representa la longitud del vector, es decir, lo que mide la flecha.

11
Suma de vectores Numéricamente, se suman las componentes de cada vector por separado. Gráficamente, tenemos varios métodos: Regla del paralelogramo: unimos dos vectores por su punto de aplicación, dibujando un paralelogramo que nos indicará el vector suma. Regla del polígono: los vectores se van colocando uno al final del otro, obteniendo el vector suma uniendo el inicio con el final de estos vectores.

12
0.4.4. Componentes de un vector
En muchas ocasiones nos interesa trabajar con vectores que estén dentro de los ejes, por lo que se realiza la descomposición de dicho vector según los ejes, utilizando para ello los conceptos trigonométricos así como la suma de vectores. Simplemente, se proyecta el final del vector hasta cada uno de los ejes, obteniendo un triángulo rectángulo, pudiendo así obtener dos vectores, en este caso, vx y vy, cuya suma por la regla del paralelogramo nos daría el vector inicial v. Resta de vectores

13
INTRODUCCIÓN ¿Te estás moviendo en este momento o estás en reposo? ¿Y la profesora? ¿Y la Luna? ¿Y el Sol? ¿Y la Tierra? Cuando vas en el autobús, ¿no te ha dado alguna vez la sensación de que se está moviendo la calle en vez de tú? ¿Se mueve tu compañero de asiento? ¿Y si lo vieses desde fuera? Para encontrar la casa de un amigo tuyo, ¿cuántos datos necesitas conocer? ¿Por qué los corredores en las curvas entran frenando y salen acelerando? ¿Por qué cuando nadas en el mar, aunque lo hagas en línea recta te desplazas lateralmente? Estas y muchas más preguntas las podrás responder al finalizar este tema….

14
1. Concepto de movimiento
El viajero de la vagoneta se encuentra en movimiento respecto al observado A pero está en reposo respecto al observador B. El movimiento es relativo, es decir, depende del Sistema de Referencia (SR) utilizado para describir el movimiento. Todas las descripciones son igual de válidas, siempre que indiquemos respecto a qué estamos estudiando dicho movimiento: “un cuerpo se está moviendo si cambia su posición respecto al un sistema de referencia establecido en el tiempo”
 utilizado. para describir el movimiento. Todas las descripciones son igual de válidas, siempre que indiquemos respecto a qué estamos. estudiando dicho movimiento: un cuerpo se está moviendo si cambia su posición. respecto al un sistema de referencia establecido en el tiempo")
15
La velocidad de la rotación de la tierra es muy
rápida, unos 465 metros por segundo, medida sobre la línea del Ecuador. Sin embargo ninguno de nosotros sentimos el más leve movimiento referido a este hecho durante nuestras vidas ¿a que se debe ello?. El hecho de que no nos apercibamos de esta enorme velocidad de rotación se debe a que nos encontramos presos por la gravedad del planeta. Movimiento de traslación alrededor del Sol: La Tierra gira alrededor del Sol, describiendo una órbita elíptica, a una velocidad media de 29,8 km/s (siendo máxima en el perihelio* 30,75 km/s y mínima en el afelio** 28,76 km/s). (*) Perihelio: punto de la órbita más cercana al Sol. (**) Afelio: punto de la órbita más lejana al Sol. ¡¡CÓMO PARA QUE DIGAS QUE AHORA ESTÁS PARADO!!!
. (*) Perihelio: punto de la órbita más cercana al Sol. (**) Afelio: punto de la órbita más lejana al Sol. ¡¡CÓMO PARA QUE DIGAS QUE AHORA ESTÁS PARADO!!!")
16
2. Magnitudes características del movimiento
2.1. Vector posición ¿En qué posición está Óscar respecto a Alberto? ¿Y respecto a Laura? ¿A qué distancia se encuentra de cada uno? Posición: vector –necesito saber su valor, dirección y sentido- r Distancia: escalar –sólo necesito conocer el valor numérico- d En el SI ambos se miden en metros (m)
")
17
2.2. Vector desplazamiento
Ahora imaginaros que cada uno de vosotros se levanta y vas hasta la pizarra. Tu posición respecto a mí ha cambiado así que yo diría que estás en movimiento respecto a mí (SR) Este cambio de posición, se representa a través de otro vector, el vector desplazamiento Δs FÍJATE: el símbolo matemático Δ significa incremento y siempre se calcula como el final menos el principio. Pero, qué distancia has recorrido…. Piensa siempre que la distancia o espacio recorrido Δs es como la línea que va dejando Un esquiador en la nieve o un caracol en la hierba.
 Este cambio de posición, se representa a través de otro vector, el vector desplazamiento. Δs. FÍJATE: el símbolo matemático Δ significa incremento. y siempre se calcula como el final menos el principio. Pero, qué distancia has recorrido…. Piensa siempre que la distancia o espacio recorrido Δs es como la línea que va dejando. Un esquiador en la nieve o un caracol en la hierba.")
18
Puedes ver que cuanto más cerca estén los
vectores de posición inicial y final más se parece el vector desplazamiento a la distancia recorrida. Esto es el cálculo diferencial. Además, si el movimiento se realiza en línea recta Δr = Δs.

19
tiempo es relativo y depende del estado de movimiento del observador
En Física se suele decir que el tiempo es invariante, es decir que su valor no depende del sistema de referencia elegido, aunque según la teoría de la relatividad de Einstein el tiempo es relativo y depende del estado de movimiento del observador Espejo Luz d Un rayo de luz rebota en los espejos haciendo “tic” cada vez, como un reloj. Como la luz va a Km/s y recorre una distancia d fija, todos los “tics” duran lo mismo (imaginemos que 1 s) Luz d Alberto Ana v=cte L Pero Alberto observará otra cosa… al ver a Ana y al estar moviéndose a una velocidad v el rayo de luz no es igual …
 Luz. d. Alberto. Ana. v=cte. L. Pero Alberto observará otra cosa… al ver a Ana y. al estar moviéndose a una velocidad v el rayo de luz no es igual …")
20
2.4. Velocidad La velocidad es una magnitud física que relaciona el cambio de posición de un móvil con el tiempo que tarda en realizar dicho cambio: Es una magnitud vectorial. El módulo de la velocidad es el cociente entre la distancia recorrida y el tiempo empleado y se suele denominar rapidez o celeridad. En el SI se mide en m/s (m.s-1). Es un vector siempre tangente a la trayectoria y de sentido del movimiento.
. Es un vector siempre tangente a la trayectoria y. de sentido del movimiento.")
21
2.4.1. Velocidad y celeridad media
La velocidad media es una magnitud vectorial cuya dirección y sentido coincide con los del vector desplazamiento. La celeridad es escalar cuyo valor coincidirá cuando la trayectoria es rectilínea Ambas, si hacemos el análisis dimensional se medirán en el SI en m/s (ms-1)
")
22
2.4.2. Velocidad instantánea
La velocidad instantánea será la velocidad real que tienes en cada instante (t≈0s) Es una magnitud vectorial tangente a la trayectoria en cada punto de la misma y que puede representarse en función de sus coordenadas cartesianas
 Es una magnitud vectorial tangente a la trayectoria en cada punto de la misma y que puede. representarse en función de sus coordenadas cartesianas.")
23
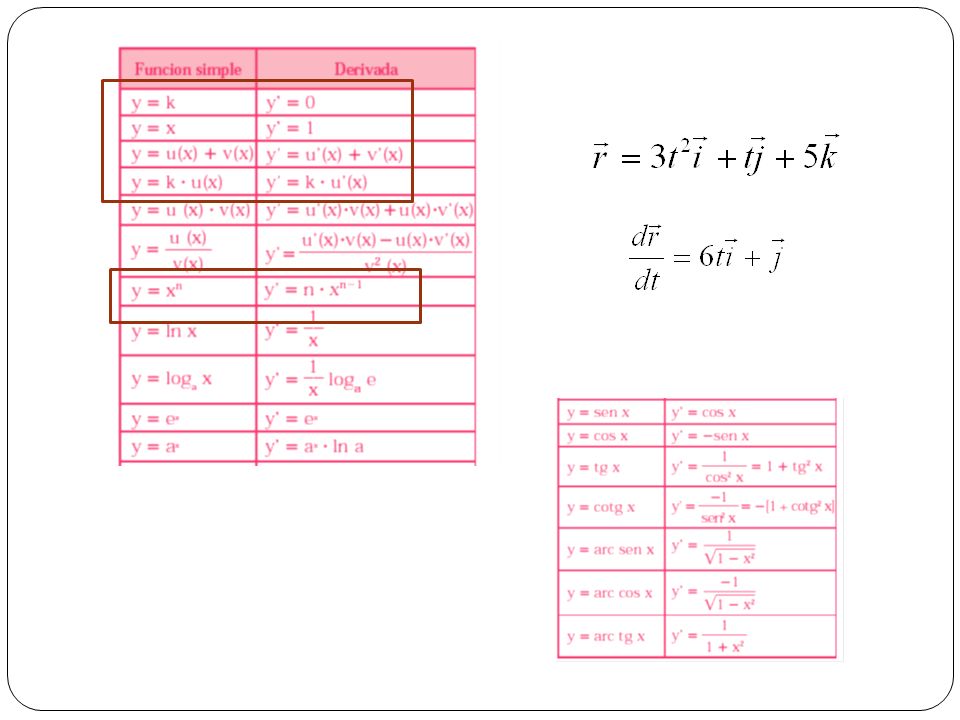
Herramientas matemáticas: derivar
Los matemáticos tienen una herramienta matemática para calcular lo que sucede cuando el tiempo se va haciendo cada vez más pequeño, cada vez más…., de forma indefinida. Esta es la función límite. Este valor límite de la función matemática se denomina derivada. Calcular la derivada de una función requiere de una serie de reglas dependiendo de qué forma tenga esa función a derivar. Durante este curso sólo utilizaremos expresiones polinómicas para derivarlas. Atento….. Lo primero para derivar es tener una expresión en función del tiempo (de la variable respecto a la cual la queremos derivar): . Una vez que tengamos esa expresión hay que seguir las sencillas reglas: 1. La derivada de una constante siempre es cero. 2. La derivada de una variable es uno. 3. La derivada de una constante por una variable es esa constante. 4. La derivada de una constante por una variable elevada a un exponente n es esa constante por el exponente n por la variable elevado a (n-1)
: . Una vez que tengamos esa expresión hay que seguir las sencillas reglas: 1. La derivada de una constante siempre es cero. 2. La derivada de una variable es uno. 3. La derivada de una constante por una variable es esa constante. 4. La derivada de una constante por una variable elevada a un exponente n es esa constante por. el exponente n por la variable elevado a (n-1)")
25
2.5. Aceleración La aceleración es una magnitud física que relaciona con el cambio (aumento o disminución) de velocidad en el tiempo que tarda dicho cambio. Sus características: Es una magnitud vectorial, que en el SI se mide en m/s2 haciendo el análisis dimensional (m.s-2). Puede ser positiva cuando la velocidad del móvil aumenta con el tiempo, o negativa cuando disminuye. Para estudiar la aceleración se suele descomponer este vector en las llamadas componentes intrínsecas, colocando un SR en el punto del vector aceleración. Uno de sus ejes es tangente a la trayectoria y otro de los ejes es perpendicular al anterior. Aceleración tangencial Aceleración normal o centrípeta
. Puede ser positiva cuando la velocidad del móvil aumenta con el tiempo, o negativa cuando disminuye. Para estudiar la aceleración se suele descomponer este vector en las llamadas. componentes intrínsecas, colocando un SR en el punto del vector aceleración. Uno de sus ejes es tangente a la trayectoria y otro de los ejes es perpendicular al anterior. Aceleración tangencial. Aceleración normal o centrípeta.")
26
La aceleración tangencial aparece cuando cambia el módulo de la velocidad
respecto al tiempo. La aceleración centrípeta, sin embargo, aparece cuando cambia la dirección y/o el sentido de la velocidad. Ahora piensa… Cuando tomas una curva en un coche si aceleras o frenas, aparecerá una aceleración tangencial que te “saca de la curva”, lo cual será peligroso si supera a la aceleración normal que te “pega a la curva”

27
Aceleración media Aceleración instantánea

Presentaciones similares