Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Arquitectura RISC & CISC y DSP

2
INTRODUCCION Veamos primero cual es el significado de los términos CISC y RISC: CISC (complex instruction set computer) . RISC (reduced instruction set computer) .
 .")
3
Los atributos complejo y reducido describen las diferencias entre los dos modelos de arquitectura para microprocesadores

4
un procesador RISC típico tiene una capacidad de procesamiento de dos a cuatro veces mayor que la de un CISC. Esto hace suponer que RISC reemplazará al CISC

5
Para aplicar una determinada arquitectura:
condiciones de realización técnica y sobre todo la rentabilidad. Existían y existen razones de compatibilidad de estructura compleja.

6
La meta principal es incrementar el rendimiento del procesador.
Para esto se deben considerar tres áreas principales.

7
La arquitectura. La tecnología de proceso. El encapsulado.

8
La tecnología de proceso, se refiere a los materiales y técnicas utilizadas en la fabricación del circuito integrado. el encapsulado se refiere a cómo se integra un procesador con lo que lo rodea en un sistema funcional. es la arquitectura del procesador lo que hace la diferencia entre el rendimiento de una CPU

11
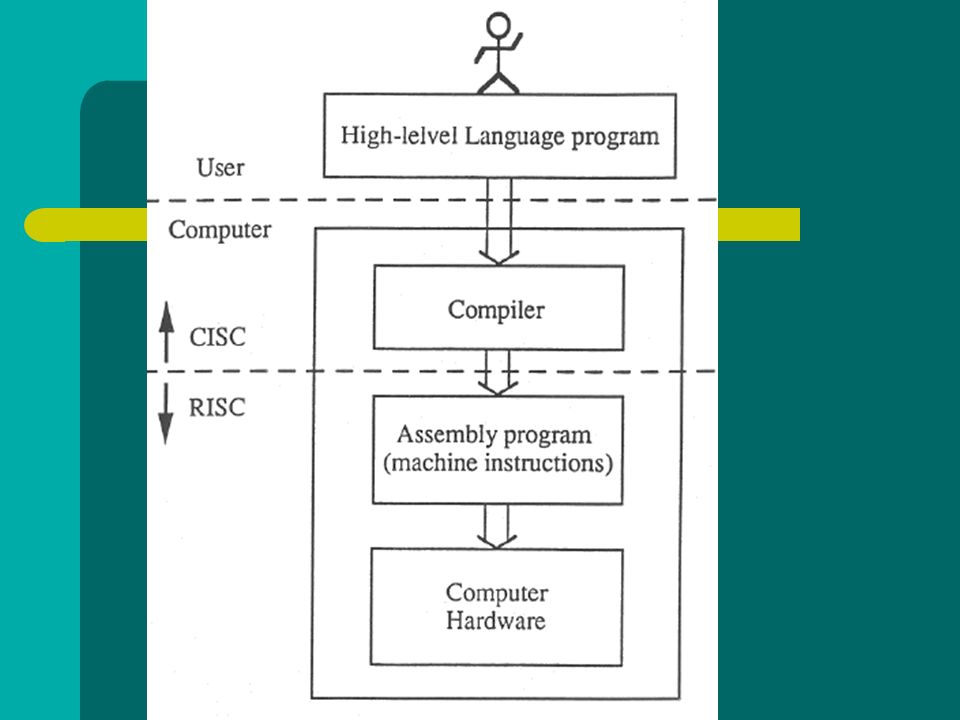
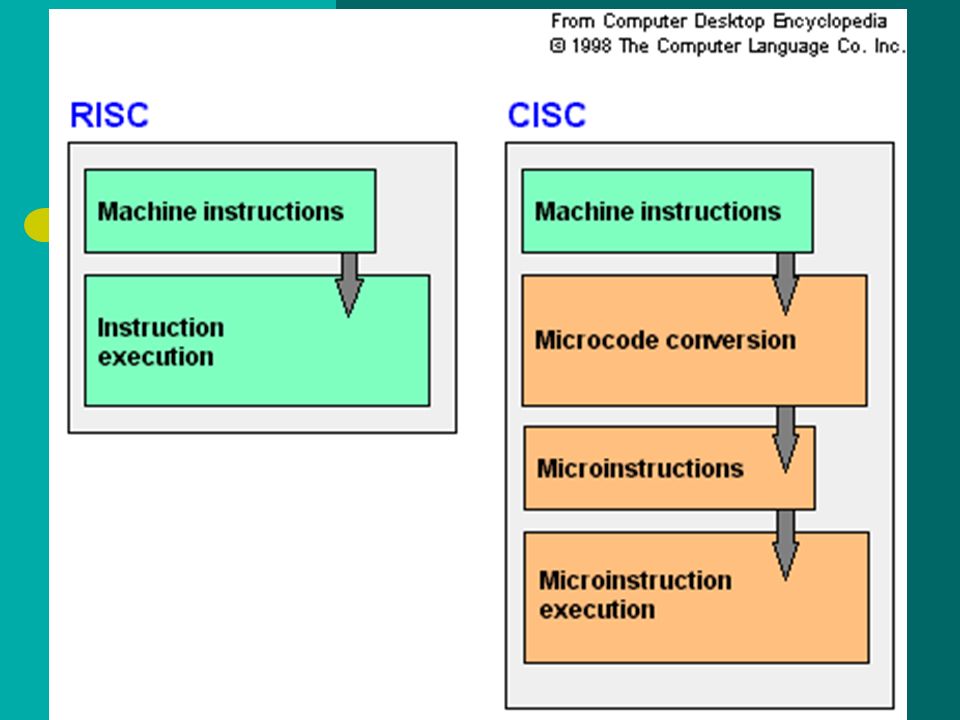
ARQUITECTURAS CISC La microprogramación es una característica importante y esencial de casi todas las arquítecturas CISC. significa que cada instrucción de máquina es interpretada por un microprograma localizado en una memoria

12
microprogramación En los sesentas era la técnica más apropiada permitía desarrollar también procesadores con compatibilidad ascendente.

13
Las instrucciones compuestas son decodificadas internamente y ejecutadas en una ROM interna.

14
ARQUITECTURAS RISC Buscando aumentar la velocidad del procesamiento se descubrió en base a experimentos que, con una determinada arquitectura de base, la ejecución de programas resultaban ser mas eficientes

15
Debido a un conjunto de instrucciones simplificado, éstas se pueden implantar por hardware directamente en la CPU

16
a mediados de la década de los setentas, con respecto a la frecuencia de utilización de una instrucción en un CISC y al tiempo para su ejecución, se observó lo siguiente:

17
20% de las instrucciones ocupa el 80% del tiempo total de ejecución
Existen secuencias de instrucciones simples que obtienen el mismo resultado que secuencias complejas predeterminadas

18
Las características de una arquitectura RISC.
siguen tomando el esquema de Von Neumann. Las instrucciones, aunque con otras características, siguen divididas en tres grupos:

19
a) Transferencia. b) Operaciones. c) Control de flujo.
 Transferencia. b) Operaciones. c) Control de flujo.")
20
Reducción del conjunto de instrucciones
Arquitectura del tipo load-store(“Las únicas instrucciones que tienen acceso a la memoria son 'load' y 'store'; registro a registro ”). ejecución de instrucciones. Pipeline
. ejecución de instrucciones. Pipeline.")
21
El hecho de que la estructura simple de un procesador RISC conduzca a una notable reducción de la superficie del circuito integrado, se aprovecha con frecuencia para ubicar en el mismo, funciones adicionales:

22
Unidad para el procesamiento aritmético de punto flotante.
Unidad de administración de memoria. Funciones de control de memoria cache. Implantación de un conjunto de registros múltiples.

23
La relativa sencillez de la arquitectura de los procesadores RISC conduce a ciclos de diseño más cortos.

24
Por ello, los procesadores RISC no solo tienden a ofrecer una capacidad de procesamiento del sistema de 2 a 4 veces mayor, sino que los saltos de capacidad que se producen de generación en generación son mucho mayores que en los CISC.

25
Por otra parte, es necesario considerar también que:
La disponibilidad de memorias. Módulos SRAM. Tecnologías de encapsulado.

26
Esto ha hecho cambiar, en la segunda mitad de la década de los ochentas, esencialmente las condiciones técnicas para arquítecturas RISC.

27
Analizar las aplicaciones.
Diseñar un bus de datos. Diseñar instrucciones. Agregar nuevas instrucciones sólo si no hacen más lenta a la máquina. Repetir este proceso para otros recursos.

28
PAPEL DE LOS COMPILADORES EN UN SISTEMA RISC
el compilador asume la función de un mediador inteligente entre el programa de aplicación y el microprocesador.

29
CAPACIDAD DE PROCESAMIENTO DE LOS SISTEMAS DESDE EL PUNTO DE VISTA DEL USUARIO:
Sistema reprogramable. Sistema incluido o dedicado.

30
DSP los D.S.P. (Digital Signal Processor) se están convirtiendo en elementos muy comunes en el diseño electrónico. encontraremos D.S.P. en circuitos relacionados con:

31
las telecomunicaciones.
sistemas de audio. y en algoritmos avanzados de control de motores

32
Tarjetas con múltiples puertos serie en servidores para proveedores de acceso a Internet
Compresión de voz en telefonía móvil Filtros complejos de sonido Líneas de retardo Generadores de eco Reconocimiento de señales DTMF Decodificación de canales en telefonía celular (GSM)
")
33
Los D.S.P. son sistemas programables que nos permiten implementar muchos tipos de aplicaciones en función de las posibilidades del sistema

34
Esta optimización se consigue mediante algunos aspectos principales:

35
implementación de operaciones por hardware
instrucciones poco comunes que ejecutan varias operaciones en un solo ciclo modos de direccionamiento especiales memoria de programa ``ancha'', con más de 8 bits

36
La ejecución de varias operaciones en un sólo ciclo es posible ya que están implementadas como circuitería adicional y no como código microprogramado en la propia unidad central.

37
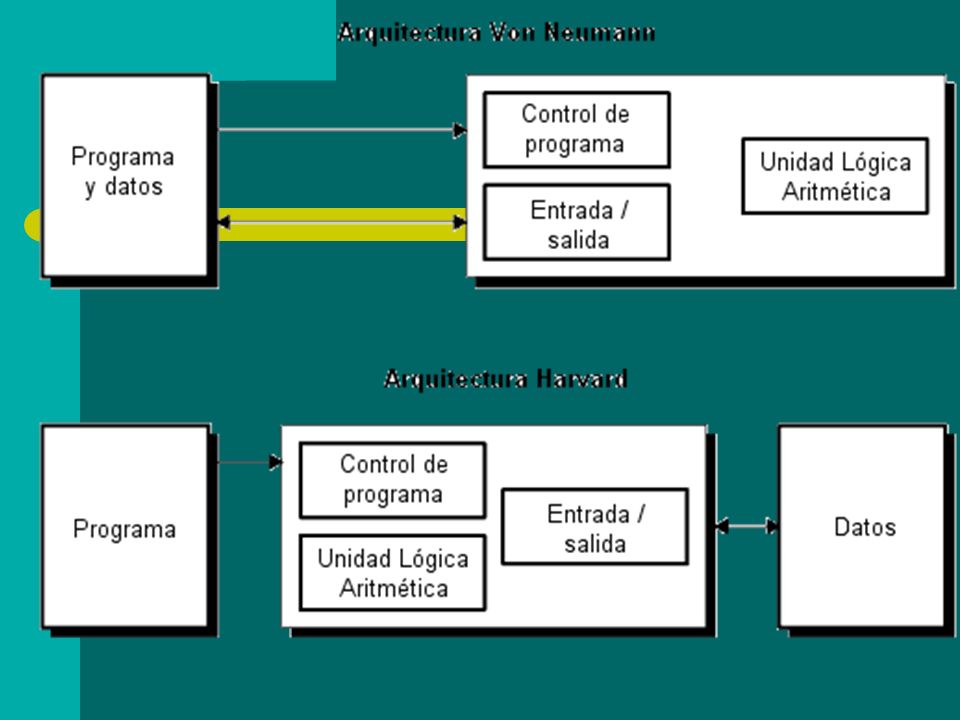
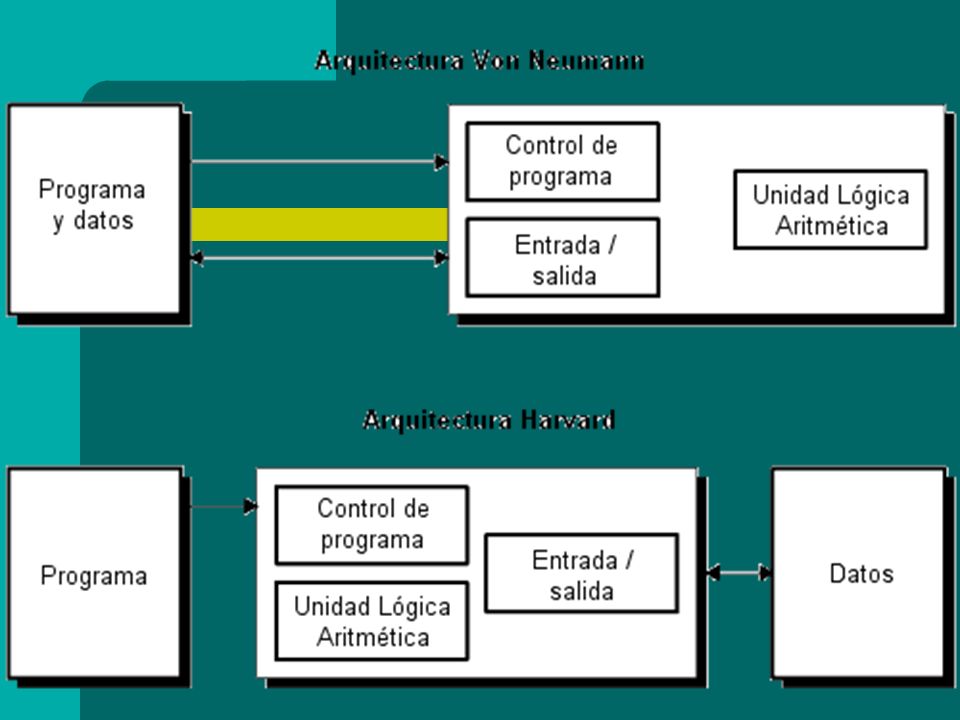
Arquitectura Típica de un D.S.P.
Los D.S.P. abandonan la arquitectura clásica de Von Neumann y apuestan por la denominada ``Arquitectura Hardvard''

38
En una arquitectura Hardvard existen bloques de memoria físicamente separados para datos y programas.

40
Con este diseño se consigue acelerar la ejecución de las instrucciones, ya que el sistema puede ejecutar simultáneamente la lectura de datos de la instrucción ``n'' y comenzar a decodificar la instrucción ``n+1'', disminuyendo el tiempo total de ejecución de cada instrucción.

41
Para ver esto más claro, pensemos en un microprocesador clásico, cuyo ciclo de trabajo es:
leer la posición de memoria apuntada por el contador de programa decodificar la instrucción ejecutar la instrucción

42
En la ejecución de la instrucción se dan estos pasos:
leer los datos de memoria operar con ellos dejarlos en la RAM

43
Normalmente en los D.S.P. se usa una arquitectura Hardvard modificada con 3 buses: uno de programa y dos de datos

45
La unidad aritmético-lógica de los D.S.P.

46
Tiene dos unidades las cuales son:
La unidad central aritmético - lógica La unidad generadora de direcciones

47
La unidad central aritmético-lógica se encarga de todos los cálculos, excepto los referentes a direcciones efectivas en direccionamiento indexado

48
el D.S.P. incorpora una segunda UAL que se encarga solamente de hacer las sumas de la dirección base con el registro índice

49
Además de las instrucciones aritméticas habituales, la unidad central aritmético-lógica puede realizar operaciones booleanas

50
un D.S.P. realiza la multiplicación en un solo ciclo ya que incorpora un multiplicador construido a base de puertas lógicas.

51
Con la llegada de los D. S. P
Con la llegada de los D.S.P. se abre un nuevo campo para el diseñador de sistemas, ya que podemos implementar sistemas que requieren una gran capacidad de proceso con un coste mucho menor que cualquiera de las soluciones existentes. No obstante, no tenemos que lanzarnos alocadamente a programar D.S.P. para todas las aplicaciones, sino que debemos escoger el sistema más adecuado a nuestras necesidades, aunque ello implique el tener que desarrollar una rutina de multiplicación en ensamblador.

Presentaciones similares











>")







