Descargar la presentación
La descarga está en progreso. Por favor, espere

1
CONCEPTOS BASICOS

2
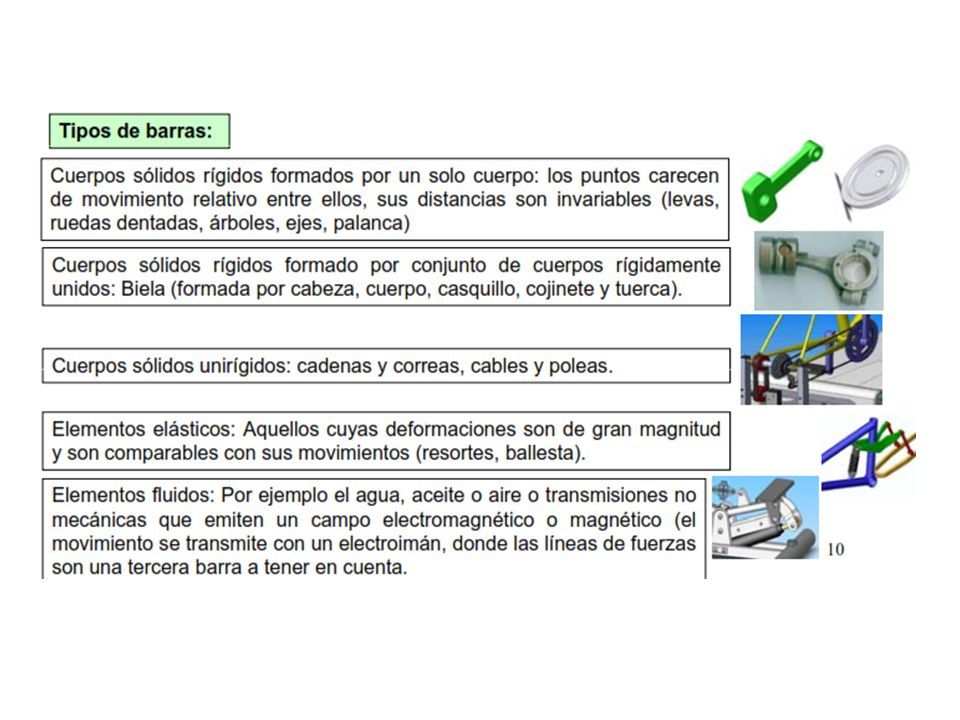
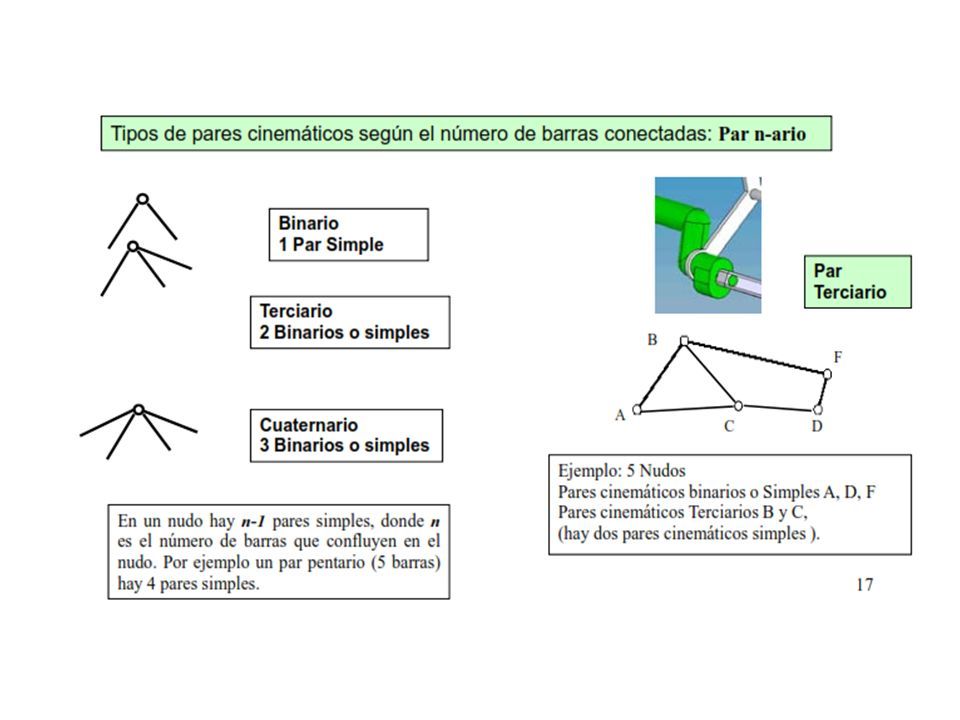
ESLABON o BARRA: un eslabón es un cuerpo rígido (supuesto), que posee por lo menos dos nodos. Eslabón Binario: el que tiene dos nodos Eslabón Terciario:el que tiene tres nodos Eslabón Cuaternario: el que tiene cuatro nodos

4
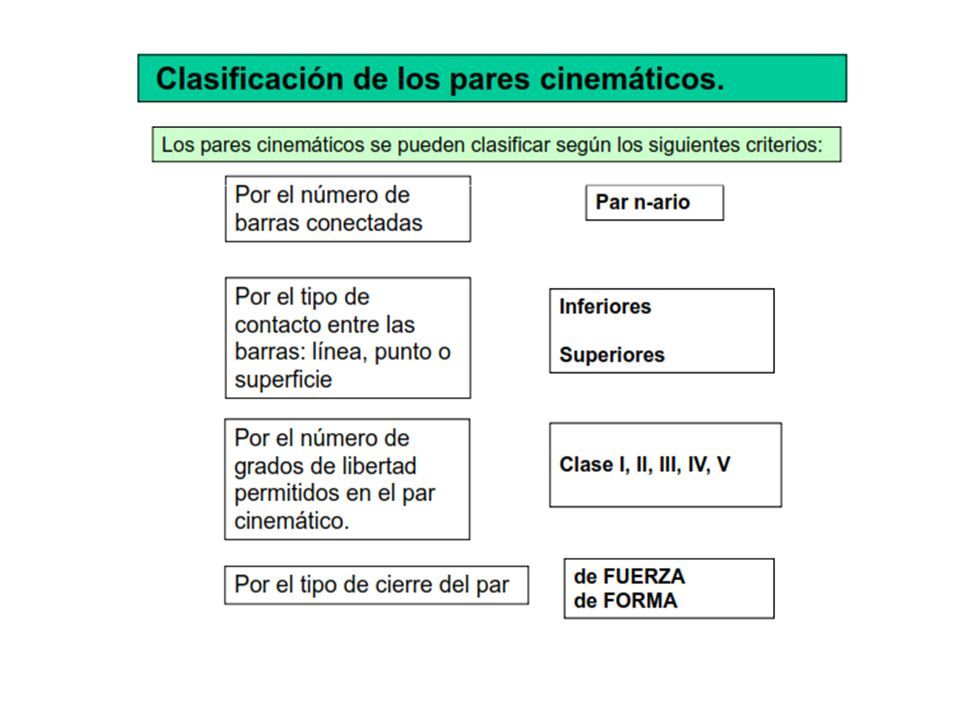
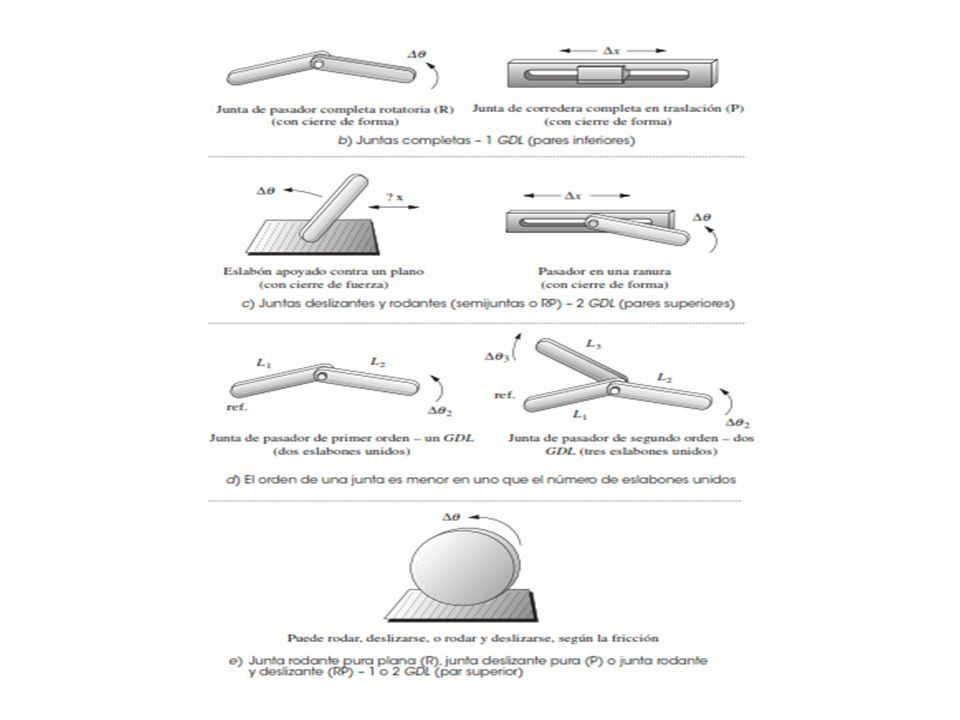
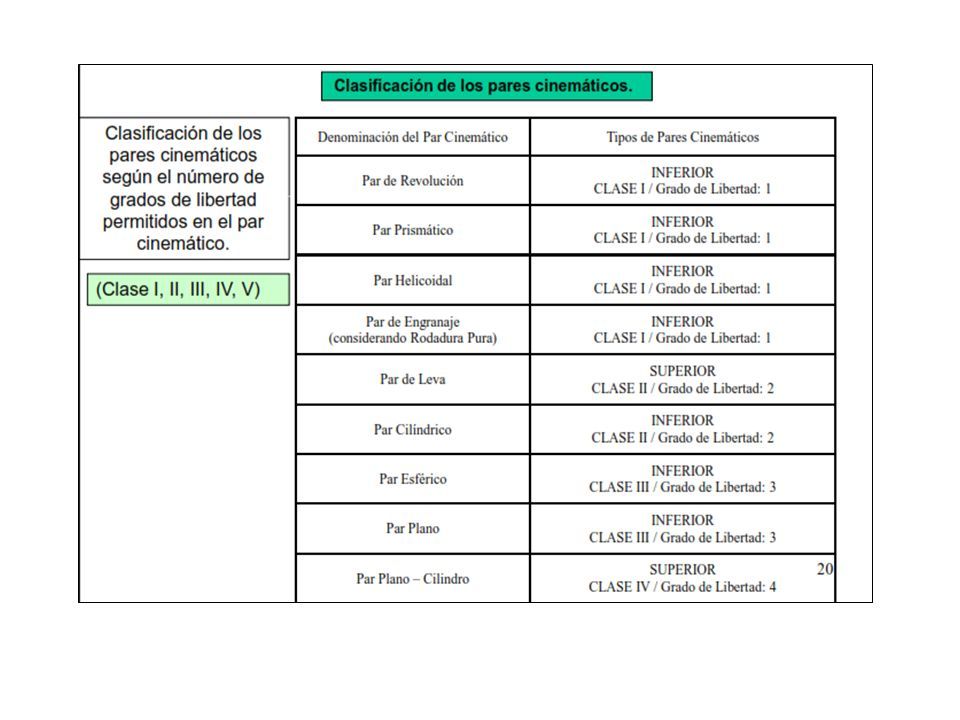
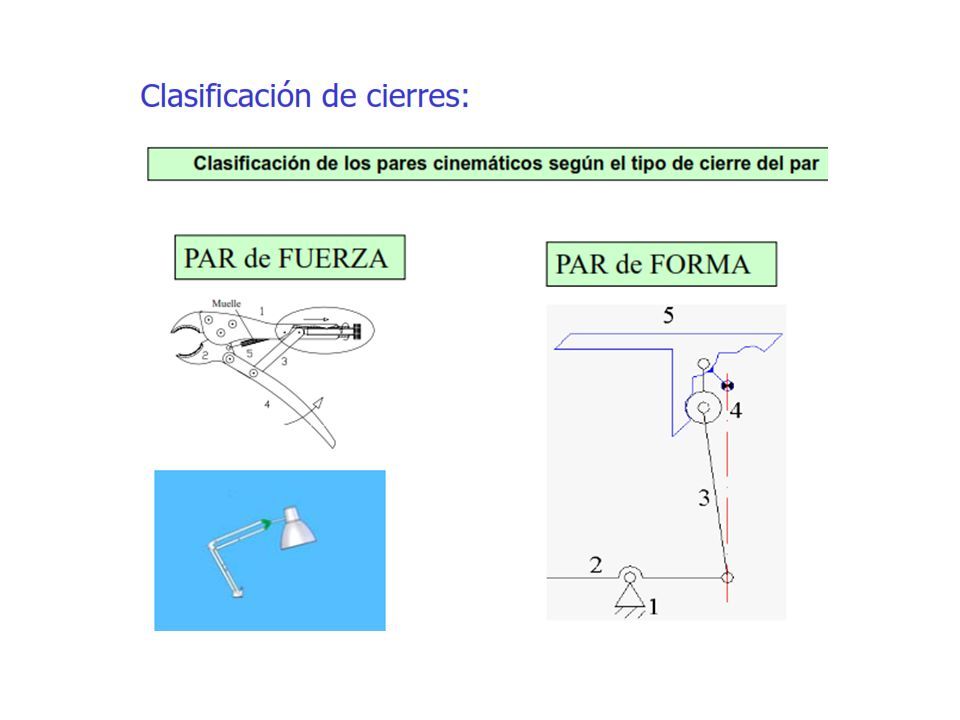
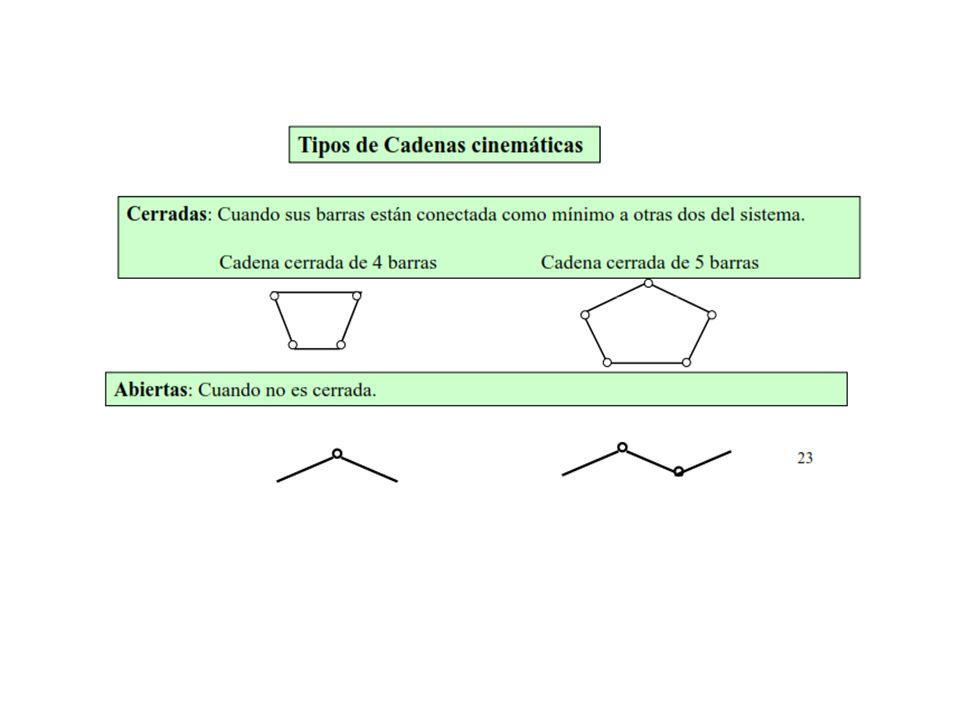
Una JUNTA es una conexión entre dos o mas eslabones (en sus nodos), la cual permite algún movimiento, o movimiento potencial, entre los eslabones conectados. Las juntas (también llamados pares cinemáticos) se pueden clasificar de varias maneras:
 se pueden clasificar de varias maneras:.")
7
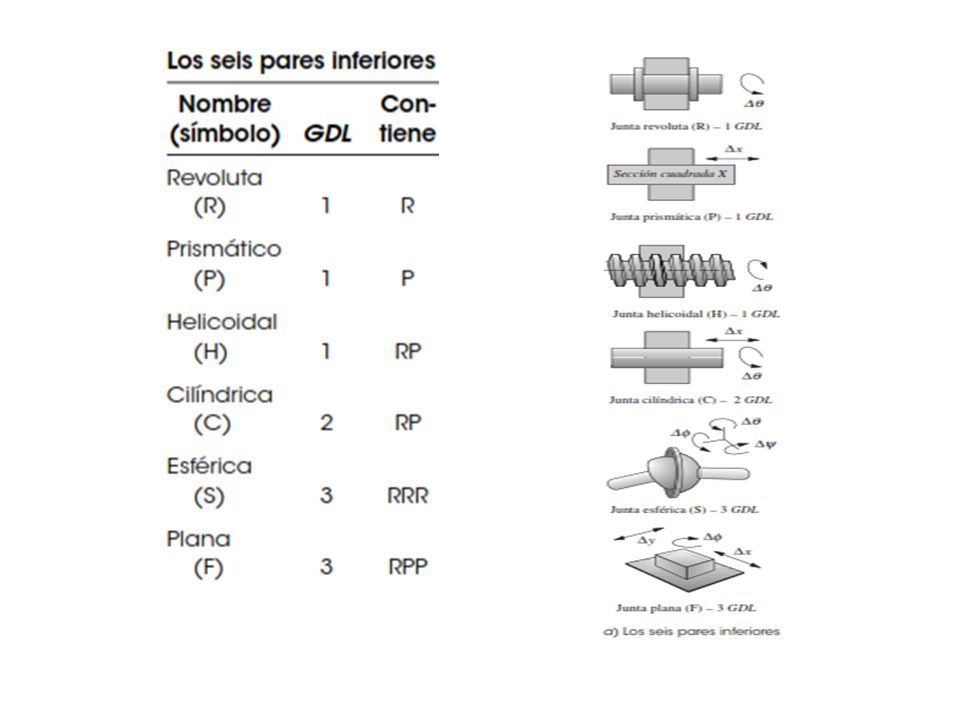
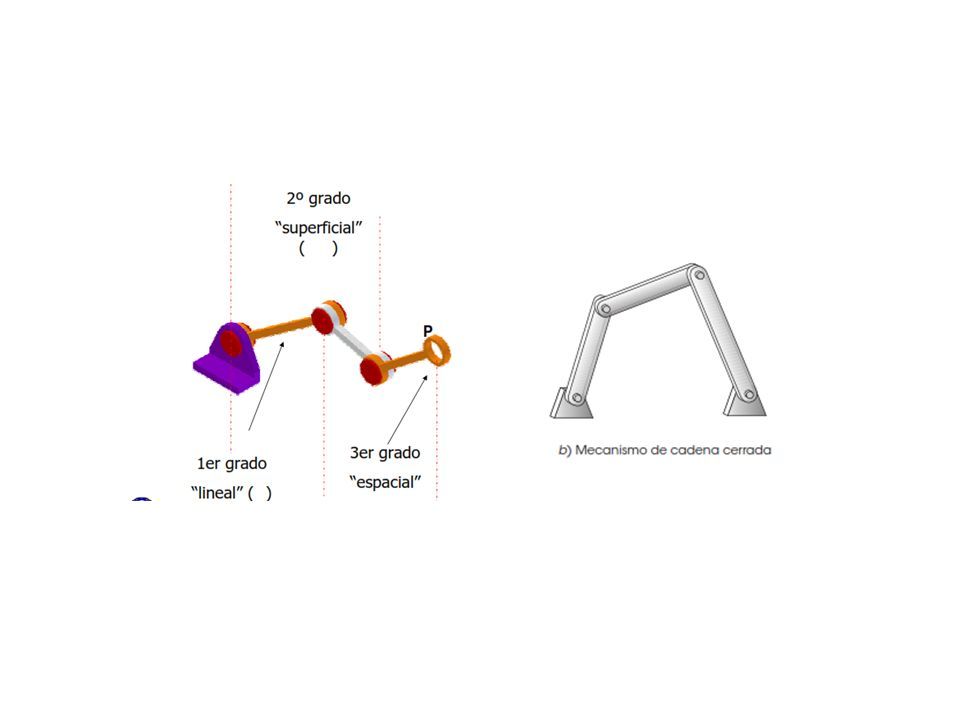
Pares Inferiores : aquellos que tienen contacto superficial Pares Superiores : los que tiene contacto lineal o puntual.

16
DIAGRAMAS CINEMATICOS

18
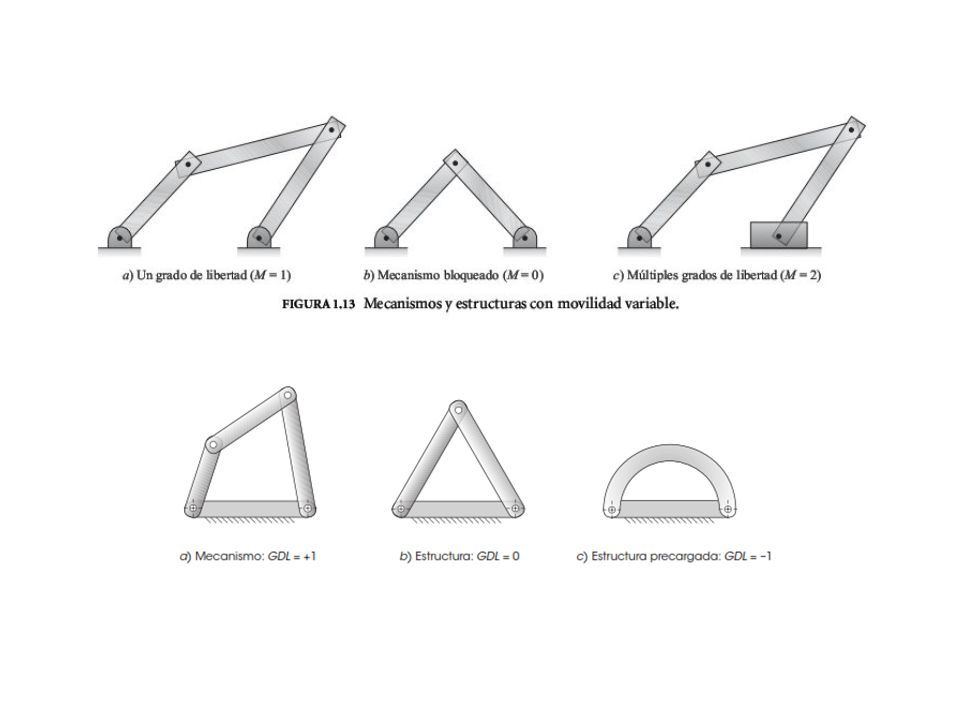
-Grado de libertad (Movilidad) en mecanismos planos : El grado de libertad es el numero de entradas independientes requeridas para posicionar con exactitud todos los eslabones de un mecanismo con respecto al suelo. La mayoría de mecanismos comerciales tienen un grado de libertad. En contraste los brazos robóticos suelen tener tres grados de libertad o incluso mas. Si el grado de libertad es positivo será un mecanismo y los eslabones tendrán movimiento relativo. Los eslabonamientos con grados de libertad iguales a cero o negativos se conocen como mecanismo bloqueados.

20
- ECUACION GRUEBLER-KUTZBACH :

21
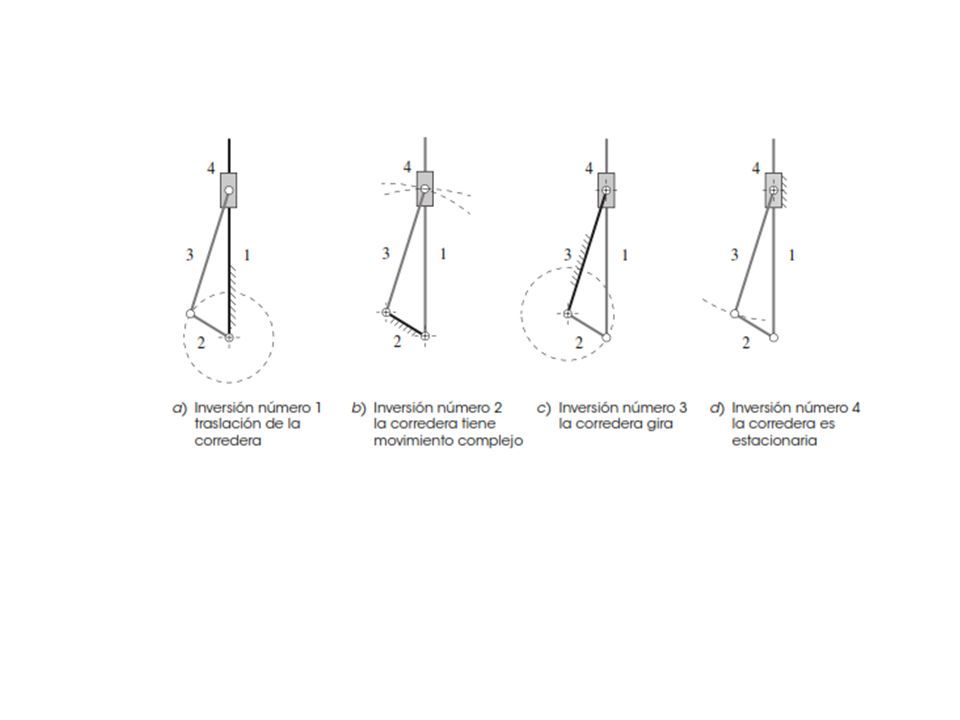
Inversión Cinemática : El movimiento absoluto se mide con respecto a una bancada estacionaria. El movimiento relativo de un punto o un eslabón se mide con respecto a otro eslabón. El primer paso en la elaboración de un diagrama cinemático, consiste en la selección de una parte que sirva como bancada. Cuando se seleccionan diferentes eslabones como bancada no se altera el movimiento relativo de los eslabones, sin embargo el movimiento absoluto puede ser significativamente diferente. El uso de eslabones alternos como eslabones fijos se conoce como Inversión Cinemática.

27
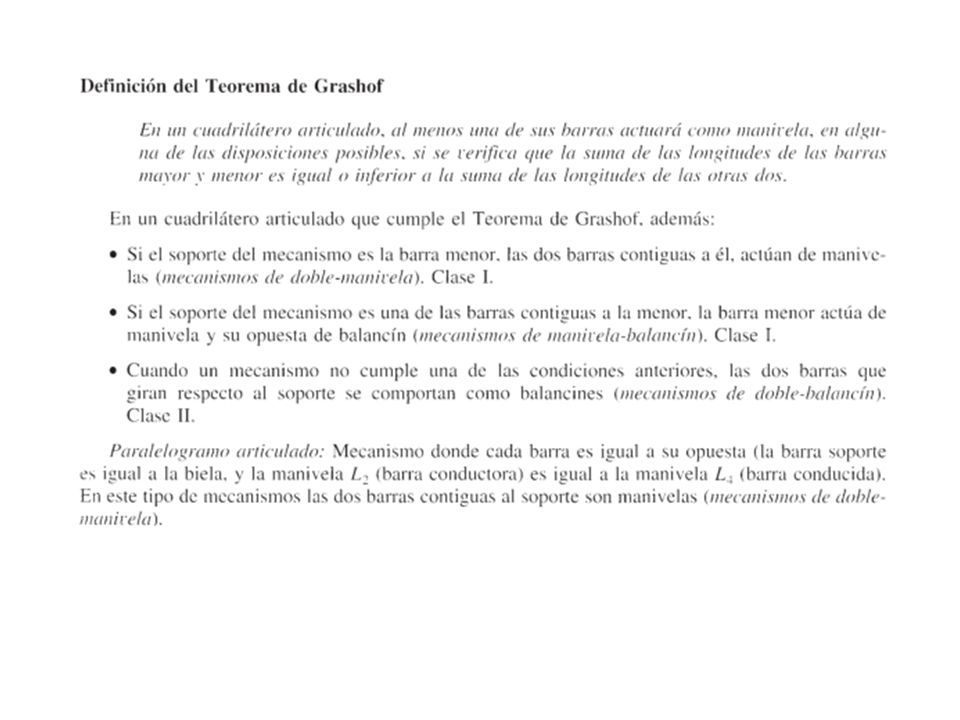
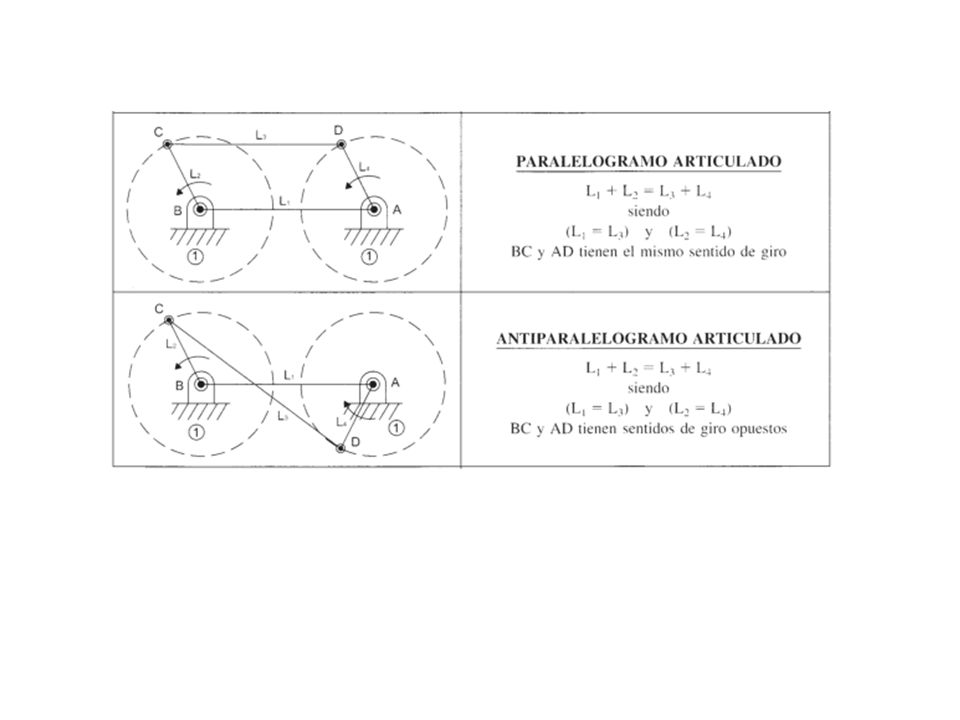
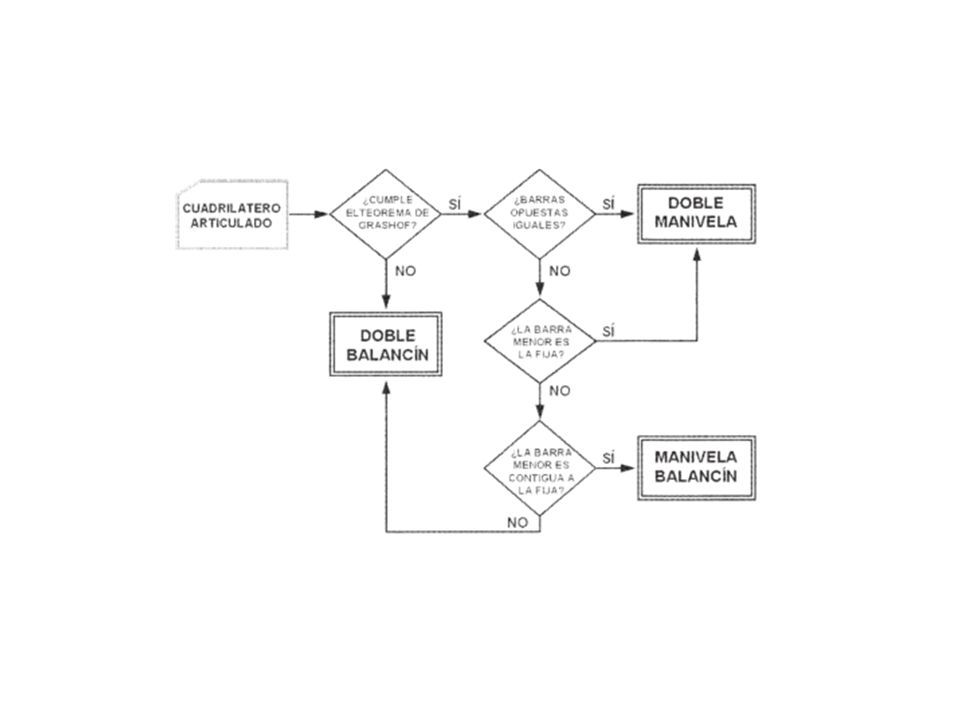
Teorema de Grashof

32
Especifique a que clase pertenecen los siguientes cuadriláteros:

34
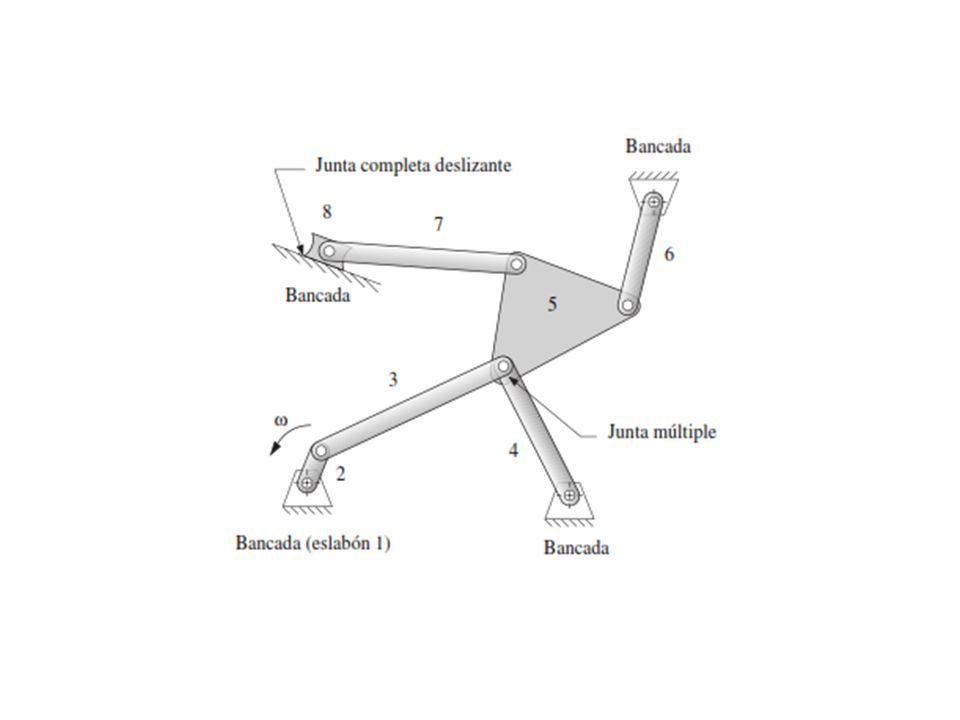
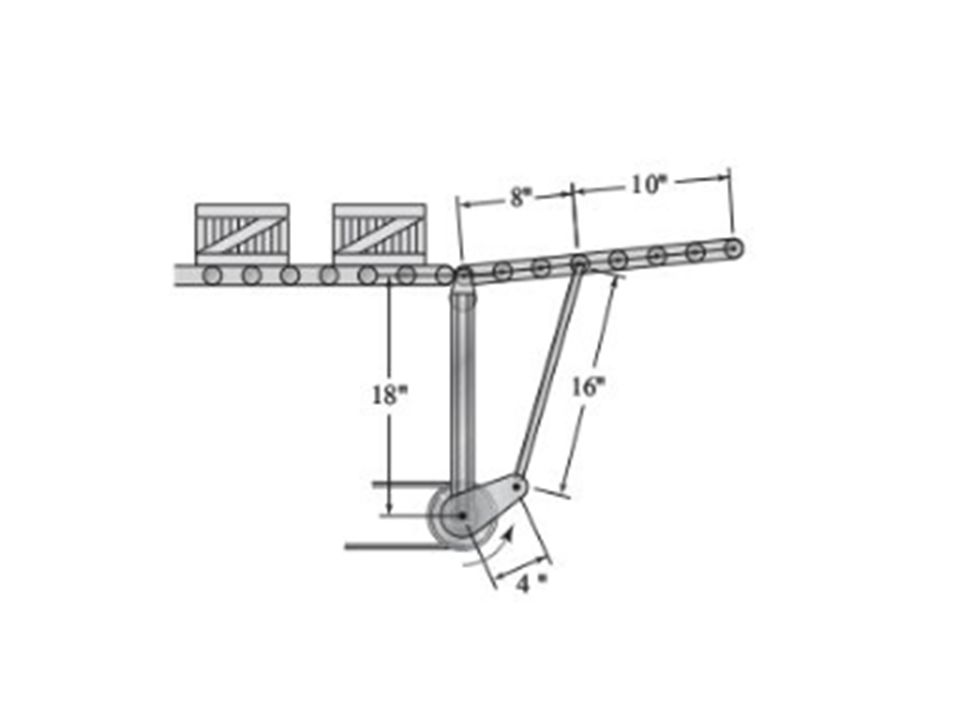
Hacer su diagrama cinematico de la siguiente figura y calcular su grados de libertad.

37
Clasifique el mecanismo de cuatro barras, del rociador de agua con base en su posible movimiento, cuando las longitudes de los eslabones son : a = 12 in, b = 5 in, c = 12 in, d = 4 in

38
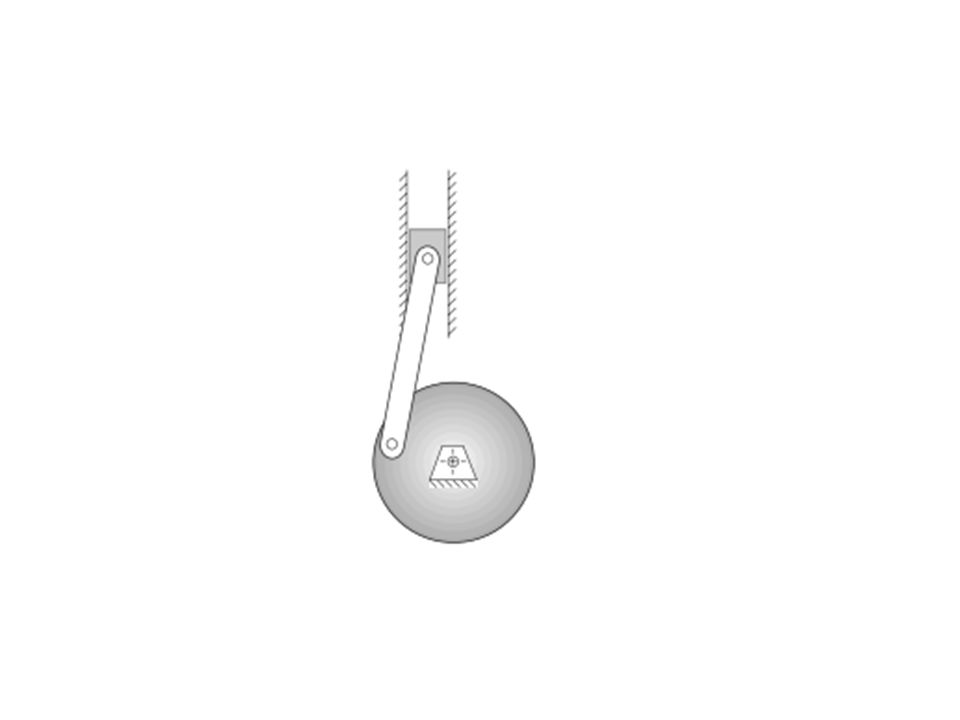
MECANISMO YUGO ESCOCES Es un mecanismo comun que convierte el movimiento de rotación en un movimiento lineal deslizante o viceversa, el perno de un eslabón giratorio esta insertado en la ranura de un yugo corredizo. Su primera aplicación fue en bombas de vapor, aunque ahora se usa como un mecanismo en una maquina de prueba para producir vibraciones

39
Mecanismos de retorno rápido Estos mecanismos se emplean en maquinas –herramientas para producir una carrera lenta de corte y una carrera rápida de retorno para una velocidad angular constante de la manivela motriz al diseñar un mecanismo de retorno rápido es de suma importancia la relación del ángulo de la manivela para la carrera de corte con respecto al de la carrera de retorno. Esta relación se conoce como relación de tiempo.

40
MECANISMOS DE MOVIMIENTO INTERMITENTE Este mecanismo es muy útil para producir un movimiento intermitente debido a que se minimiza el choque durante el acoplamiento.

41
Mecanismo de Trinquete Este mecanismo se emplea para producir un movimiento circular intermitente a partir de un miembro oscilatorio o reciprocante.

42
ECUACIONES DE ANALISIS DE POSICION EN FORMA CERRADA PARA UNA MANIVELA CORREDERA EN LINEA

43
La figura muestra el concepto de una bomba manual que se utiliza para incrementar la presión del aceite en una línea hidráulica. Determine analíticamente el desplazamiento del pistón conforme el mango gira 15°en sentido anti horario.

44
ECUACION DE ANALISIS DE POSICION EN FORMA CERRADA PARA UNA MANIVELA-CORREDERA DESCENTRADO

45
La figura muestra el concepto de una bomba manual que se utiliza para incrementar la presión del aceite en una línea hidráulica. Determine analíticamente el desplazamiento del pistón conforme el mango gira 15°en sentido anti horario.

46
ECUACIONES DE POSICION PARA UN MECANISMO CERRADO DE CUATRO BARRAS

47
POSICIONES LIMITES

48
ANGULO DE TRANSMISION Se define como el ángulo entre el eslabón de salida y el acoplador

49
Calcule analíticamente el desplazamiento lineal máximo (carrera) de la cuchilla del mecanismo de corte mostrado en la figura.
 de la cuchilla del mecanismo de corte mostrado en la figura.")
50
Determine analíticamente el desplazamiento lineal del pistón del eslabonamiento compresor mostrado en la figura conforme la manivela de 45 mm gira 90° a partir de su posición actual en sentido anti horario

51
Determine analíticamente el desplazamiento lineal de la puerta del horno del mecanismo mostrado en la figura conforme el mango de 26 pulg. gira 25° a partir de su posición actual en sentido anti horario

52
Determine analíticamente el desplazamiento lineal del sello del mecanismo mostrado, conforme el mango gira 20° a partir de su posición actual en el sentido horario.

53
En la figura se muestra un mecanismo triturador de rocas, determine el desplazamiento angular resultante del ariete triturador cuando la manivela gira 30° en sentido horario

Presentaciones similares















 coincide con el tipo de movimiento.>")







 coincide con el tipo que tiene.>")
