Descargar la presentación
La descarga está en progreso. Por favor, espere

1
INTELIGENCIA ARTIFICIAL
Búsqueda no Informada Mg. Samuel Oporto Díaz Lima, 12 de octubre de 2005

2
Mapa Conceptual del Curso
Inteligencia Artificial y Sistemas Expertos Inteligencia Artificial Conceptos Generales Conocimiento Agentes Planeación Lógica y Razonamiento Lógica Proposicional Lógica de Predicados Inferencia y Razonamiento Lenguaje Simbólico LISP Búsqueda Búsqueda Ciega Búsqueda Ciega Búsqueda Heurística

3
Tabla de Contenido Estrategias de Búsqueda Búsqueda no Informada.
Búsqueda por Amplitud Búsqueda por Costo Uniforme Búsqueda en Profundidad Búsqueda Limitada por Profundidad Búsqueda por Profundidad Iterativa Búsqueda Bidireccional Bibliografía

4
Objetivos Presentar los conceptos acerca de las estrategías de búsqueda no informada.

5
ESTRATEGIAS DE BÚSQUEDA

6
Estrategias de Búsqueda
Búsqueda No Informada (Ciega) Búsqueda Informada (Heurística) Búsqueda preferente por amplitud Búsqueda de costo uniforme Búsqueda preferente por profundidad Búsqueda limitada por profundidad Búsqueda por profundización iterativa Búsqueda bidireccional Búsqueda avara Búsqueda A* Búsqueda A*PI Búsqueda A*SRM
 Búsqueda Informada. (Heurística) Búsqueda preferente por amplitud. Búsqueda de costo uniforme. Búsqueda preferente por profundidad. Búsqueda limitada por profundidad. Búsqueda por profundización iterativa. Búsqueda bidireccional. Búsqueda avara. Búsqueda A* Búsqueda A*PI. Búsqueda A*SRM.")
7
Búsqueda en el Espacio de Estados
La resolución de un problema con esta representación pasa por explorar el espacio de estados Partimos del estado inicial evaluando cada paso hasta encontrar un estado final En el caso peor exploraremos todos los posibles caminos entre el estado inicial del problema hasta llegar al estado final Definiremos una representación del espacio de estados para poder implementar algoritmos que busquen soluciones

8
Estructura del espacio de estados
Estructuras de datos: Árboles y Grafos Estados = Nodos Operadores = Arcos entre nodos (dirigidos) Árboles: Solo un camino lleva a un nodo Grafos: Varios caminos pueden llevar a un nodo
 Árboles: Solo un camino lleva a un nodo. Grafos: Varios caminos pueden llevar a un nodo.")
9
Algoritmo Básico Basado en búsqueda y recorrido en árboles y grafos
La estructura la construimos a medida que hacemos la búsqueda Algoritmo para una solución: Seleccionar el primer estado como el estado actual mientras el estado actual no es el estado final hacer Generar y guardar sucesores del estado actual (expansión) Escoger el siguiente estado entre los pendientes (selección) fin-mientras La selección del siguiente nodo determinará el tipo de búsqueda (orden de selección o expansión) Es necesario definir un orden entre los sucesores de un nodo (orden de generación)
 Escoger el siguiente estado entre los pendientes (selección) fin-mientras. La selección del siguiente nodo determinará el tipo de búsqueda (orden de selección o expansión) Es necesario definir un orden entre los sucesores de un nodo (orden de generación)")
10
Algoritmo Básico Nodos abiertos: Estados generados pero aún no visitados Nodos cerrados: Estados visitados y que ya se han expandido Tendremos una estructura para almacenar los nodos abiertos Las diferentes políticas de inserción en la estructura determinarán el tipo de búsqueda Si exploramos un grafo puede ser necesario tener en cuenta los estados repetidos (esto significa tener una estructura para los nodos cerrados). Merece la pena si el número de nodos diferentes es pequeño respecto al número de caminos
. Merece la pena si el número de nodos diferentes es pequeño respecto al número de caminos.")
11
Evaluación de las Estrategias
Las estrategias se evalúan de acuerdo a su: Completez. ¿La estrategia garantiza encontrar una solución, si ésta existe? Complejidad temporal. ¿Cuánto tiempo se necesitará para encontrar una solución? Complejidad espacial. ¿Cuánta memoria se necesita para efectuar la búsqueda? Optimalidad. ¿Con esta estrategia se encontrará una solución de la más alta calidad, si hay varias soluciones? Las complejidades temporal y espacial se miden en términos de: b máximo factor de ramificación del árbol de búsqueda (branching factor) d profundidad de la solución de menor coste m profundidad máxima del espacio de estados (puede ser ∞)
 d profundidad de la solución de menor coste. m profundidad máxima del espacio de estados (puede ser ∞)")
12
BUSQUEDA NO INFORMADA

13
Estrategias de búsqueda no informada
No existe información sobre la cantidad de estados intermedios o el costo de ruta para pasar del estado actual a la meta. Sólo se sabe distinguir si estamos en el estado meta o no A esta búsqueda se le conoce también como búsqueda ciega

14
Estrategias de búsqueda no informada
Búsqueda preferente por amplitud Búsqueda de costo uniforme Búsqueda preferente por profundidad Búsqueda limitada por profundidad Búsqueda por profundización iterativa Búsqueda bidireccional

15
BUSQUEDA POR AMPLITUD (DFS)
N F F F

16
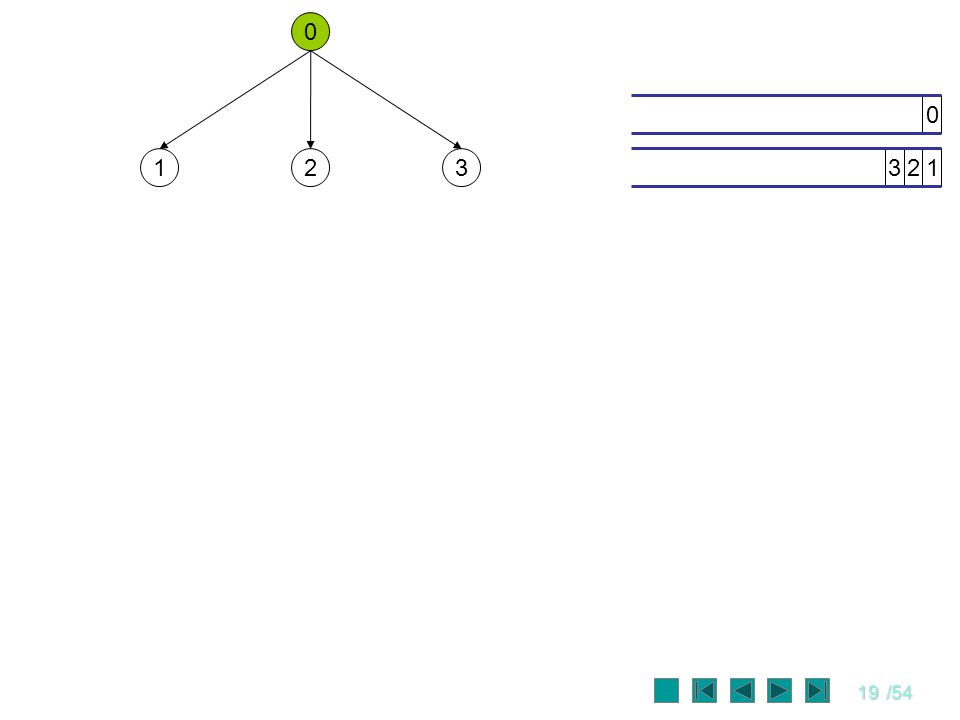
1. Búsqueda preferente por amplitud
En este caso, primero se expande el nodo raíz y luego todos los nodos generados por éste, luego sus sucesores y así sucesivamente. Todos los nodos que están a profundidad d se expanden antes que los nodos con profundidad d+1.

17
Búsqueda preferente por amplitud
Abiertos←(n0); Cerrados←( ) Si Abiertos = ( ), fin devolviendo fallo n←primer elemento de Abiertos; eliminar n de Abiertos y llevarlo a Cerrados; Suc←( ) Si n es meta, fin con éxito, devolviendo el camino expandir n, colocando sus hijos en Suc, como hijos de n eliminar de Suc cualquier nodo cuyo estado ya esté asociado a algún nodo de Abiertos o Cerrados colocar los nodos de Suc al final de Abiertos Ir a 2
; Cerrados←( ) Si Abiertos = ( ), fin devolviendo fallo. n←primer elemento de Abiertos; eliminar n de Abiertos y llevarlo a Cerrados; Suc←( ) Si n es meta, fin con éxito, devolviendo el camino. expandir n, colocando sus hijos en Suc, como hijos de n. eliminar de Suc cualquier nodo cuyo estado ya esté asociado a algún nodo de Abiertos o Cerrados. colocar los nodos de Suc al final de Abiertos. Ir a 2.")
19
1 2 3 3 2 1
20
1 1 2 3 c b a 3 2 a b c

21
2 1 1 2 3 f e d c b a 3 a b c d e f

22
3 2 1 1 2 3 i h g f e d c b a a b c d e f g h i

23
a 3 2 1 1 2 3 γ β α i h g f e d c b a b c d e f g h i α β γ

24
b a 3 2 1 1 2 3 ζ ε δ γ β α i h g f e d c a b c d e f g h i α β γ δ ε ζ

25
Búsqueda preferente por amplitud
Si hay solución, es seguro que se encontrará mediante la búsqueda preferente por amplitud. Si son varias soluciones, siempre encontrará primero el estado de meta más próximo (menos profundidad, más a la izquierda). La búsqueda preferente por amplitud es completa y óptima siempre y cuando el costo de ruta sea una función que no disminuya al aumentar la profundidad del nodo. Completez, Complejidad Temporal, Complejidad Espacial, Optimalidad.
. La búsqueda preferente por amplitud es completa y óptima siempre y cuando el costo de ruta sea una función que no disminuya al aumentar la profundidad del nodo. Completez, Complejidad Temporal, Complejidad Espacial, Optimalidad.")
26
Complejidad Temporal Si b es el factor de ramificación de los estados, y la solución está a una profundidad d, entonces la cantidad máxima de nodos expandidos antes de encontrar la solución es: 1+ b + b2 + b bd + (bd+1 – b) La complejidad de este algoritmo es O(bd+1).
 La complejidad de este algoritmo es O(bd+1).")
27
Complejidad Espacial y Temporal
Si b=10, se analizan 10,000 nodos por segundo y cada nodo requiere 1000 bytes de almacenamiento: Profundidad Nodos Tiempo Memoria 2 1100 .11 segundos 1 Megabyte 4 111,100 11 segundos 106 Megabytes 6 107 19 minutos 10 Gigabytes 8 109 31 horas 1 Terabyte 10 1011 129 días 101 Terabyte 12 1013 35 años 10 Petabytes 14 1015 3523 años 1 Exabyte

28
Resumen (BFS) Los nodos se visitan y generan por niveles
La estructura para los nodos abiertos es una cola (FIFO) Un nodo es visitado cuando todos los nodos de los niveles superiores y sus hermanos precedentes han sido visitados Características: Completidud: El algoritmo siempre encuentra una solución Complejidad temporal: Exponencial respecto al factor de ramificación y la profundidad de la solución O(bd+1). Complejidad espacial: Exponencial respecto al factor de ramificación y la profundidad de la solución O(bd+1). Optimalidad: La solución que se encuentra es óptima en número de niveles desde la raíz
 Un nodo es visitado cuando todos los nodos de los niveles superiores y sus hermanos precedentes han sido visitados. Características: Completidud: El algoritmo siempre encuentra una solución. Complejidad temporal: Exponencial respecto al factor de ramificación y la profundidad de la solución O(bd+1). Complejidad espacial: Exponencial respecto al factor de ramificación y la profundidad de la solución O(bd+1). Optimalidad: La solución que se encuentra es óptima en número de niveles desde la raíz.")
29
Ejercicio 1 Determine el orden en que un agente basado en metas busca el objetivo (orden en que se visitan y orden en que se aperturan): VISITA (nodos cerrados) APERTURA (nodos abiertos)
 APERTURA (nodos abiertos)")
30
Ejercicio 2 Diga para el siguiente árbol el orden en que se aperturan (nodos abiertos) y orden en que se visitan los nodos (nodos cerrados). Tenga en consideración lo siguiente: Existe dos colas de nodos, nodos abiertos y nodos cerrados. La cola de nodos abiertos siempre se inicializa con el primer nodo del árbol, la cola de nodos cerrados se inicializa vacío. Para visitar un nodo este primero debe ser abierto. La visita a un nodo, permite generar la lista de nodos abiertos (nodos hijos) El primer nodo que se visita en un árbol siempre es el primer nodo del árbol. La vista de un nodo permite que este pase a la lista de nodos cerrados. La técnica de búsqueda no informada se diferencia por el orden en que se vistan los nodos, no por el orden en que se abren los nodos.
 El primer nodo que se visita en un árbol siempre es el primer nodo del árbol. La vista de un nodo permite que este pase a la lista de nodos cerrados. La técnica de búsqueda no informada se diferencia por el orden en que se vistan los nodos, no por el orden en que se abren los nodos.")
31
BUSQUEDA POR COSTO UNIFORME Uniform-Cost Search (UCS)
")
32
Búsqueda de costo uniforme
Con la búsqueda anterior no siempre se encuentra la solución de costo de ruta mínimo. La búsqueda de costo uniforme expande siempre el nodo de menor costo en el margen, medido por el costo de ruta g(n) en vez del nodo de menor profundidad. Si se cumplen ciertas condiciones, es seguro que la primera solución encontrada será la más barata. La búsqueda en amplitud es una búsqueda de costo uniforme donde g(n) = profundidad(n)
 en vez del nodo de menor profundidad. Si se cumplen ciertas condiciones, es seguro que la primera solución encontrada será la más barata. La búsqueda en amplitud es una búsqueda de costo uniforme donde g(n) = profundidad(n)")
33
Búsqueda de costo uniforme
Problema: Ir de S a G al menor costo posible S es el único nodo en la frontera (nodos pendientes por expandir). Debido a que no es la meta, se procede a su expansión... NOTA: NO SE GENERARÁN NUEVAMENTE LOS ESTADOS ANALIZADOS PREVIAMENTE
. Debido a que no es la meta, se. procede a su expansión... NOTA: NO SE GENERARÁN NUEVAMENTE LOS ESTADOS ANALIZADOS PREVIAMENTE.")
34
Búsqueda de costo uniforme
1 10 B 5 5 S G 15 5 A B C 1 5 15 C Frontera Hay 3 nodos en la frontera (A, B y C), y se elige el de menor costo de ruta (A). Como no es una meta, se procede a su expansión...
, y se elige el de menor costo de ruta (A). Como no es una meta, se procede a su expansión...")
35
Búsqueda de costo uniforme
1 10 B 5 5 S G 15 5 A B C 5 15 C Frontera G 11 Hay 3 nodos en la frontera (G, B y C), de los cuales B es el que tiene el menor costo de ruta, por lo que se procede a expandirlo. Note que aunque ya hay una solución en la frontera (G), el algoritmo la ignora porque la rama S-B tiene posibilidades de encontrar una solución mejor que S-A-G.
, de los cuales B es el que tiene el menor costo de ruta, por lo que se procede a expandirlo. Note que aunque ya hay una solución en la frontera (G), el algoritmo la ignora porque la rama S-B tiene posibilidades de encontrar una solución mejor que S-A-G.")
36
Búsqueda de costo uniforme
1 10 B 5 5 S G 15 5 A B C 15 C Frontera G 11 G 10 Hay 3 nodos en la frontera (G, G y C), de los cuales el segundo G es el que tiene el menor costo de ruta, por lo que se procede a expandirlo. En ese momento se detecta que es una solución (sólo genera nodos ya analizados) y la búsqueda termina. Note que hay dos nodos (las dos G’s en la frontera) que representan a un mismo estado, y que el algoritmo ni siquiera intenta expandir C, que no tiene posibilidades de llevar a una mejor solución (S-C ya tiene un costo de 15).
, de los cuales el segundo G es el que tiene el menor costo de ruta, por lo que se procede a expandirlo. En ese momento se detecta que es una solución (sólo genera nodos ya analizados) y la búsqueda termina. Note que hay dos nodos (las dos G’s en la frontera) que representan a un mismo estado, y que el algoritmo ni siquiera intenta expandir C, que no tiene posibilidades de llevar a una mejor solución (S-C ya tiene un costo de 15).")
37
Búsqueda de costo uniforme
Este método puede encontrar la solución más barata siempre y cuando se satisfaga un requisito sencillo. El costo de ruta nunca debe ir disminuyendo conforme avanzamos por la ruta, es decir, g(Sucesor(n)) g(n) para todos los nodos n. Para que el costo de la ruta no disminuya el costo de aplicar un operador no debe ser negativo. ¿Qué pasa si el costo de un operador de negativo?
) g(n) para todos los nodos n. Para que el costo de la ruta no disminuya el costo de aplicar un operador no debe ser negativo. ¿Qué pasa si el costo de un operador de negativo")
38
Resumen (UCS) Se visitan y expanden los nodos del borde con menor costo. La estructura para los nodos abiertos es una cola (FIFO) Un nodo es visitado si su costo de ruta es el menor de todos. Características: Completitud: Se encuentra la ruta siempre y cuando el costo no disminuya conforme se avanza g(sucesor(n)) ≥ g(n) Complejidad temporal: Exponencial respecto al factor de ramificación y la profundidad de la solución O(bd+1). Complejidad espacial: Exponencial respecto al factor de ramificación y la profundidad de la solución O(bd+1). Optimalidad: La solución es óptima si el costo de un operador > 0, en caso contrario hay que buscar exhaustivamente
) ≥ g(n) Complejidad temporal: Exponencial respecto al factor de ramificación y la profundidad de la solución O(bd+1). Complejidad espacial: Exponencial respecto al factor de ramificación y la profundidad de la solución O(bd+1). Optimalidad: La solución es óptima si el costo de un operador > 0, en caso contrario hay que buscar exhaustivamente.")
39
Ejercicio 3 Use la estrategia de costo uniforme para encontrar la ruta de menor costo para ir de: A D. Recuerde que para la estrategia de costo uniforme se usa la función: f = g + h : donde h = 0. Donde g es el costo de la ruta avanzada Recomendaciones: Sustente su respuesta presentando el árbol de búsqueda generado No apertura nodos ya visitados en la misma ruta.

40
Ejercicio 3

41
Búsqueda preferente por profundidad (DFS)
L O M F P Q N F F F

42
Búsqueda preferente por profundidad
En esta búsqueda siempre se expande uno de los nodos que se encuentre en lo más profundo del árbol. Sólo si la búsqueda conduce a un callejón sin salida (un nodo que no es meta y que no tiene expansión), se revierte la búsqueda y se expanden los nodos de niveles menos profundos. Lo anterior se logra mediante el algoritmo de Búsqueda-General, con una función de lista de espera que ponga los estados recién generados al principio de la lista.
, se revierte la búsqueda y se expanden los nodos de niveles menos profundos. Lo anterior se logra mediante el algoritmo de Búsqueda-General, con una función de lista de espera que ponga los estados recién generados al principio de la lista.")
43
Búsqueda preferente por profundidad
NOTA: Se supone que el factor de ramificación es b = 2 y que los nodos de nivel m = 3 no tienen sucesores.

44
Búsqueda preferente por profundidad
Sólo es necesario guardar la ruta que va del nodo raíz al nodo hoja, junto con los nodos restantes no expandidos, por cada nodo de la ruta. Si un espacio de estados tiene factor de ramificación b y profundidad máxima m, se requieren almacenar bm nodos. La complejidad temporal es de O(bm).
.")
45
Búsqueda preferente por profundidad
Si la cantidad de soluciones en un problema es grande, se recomienda esta búsqueda (BFS) sobre la búsqueda preferente por amplitud (DFS). La desventaja de esta búsqueda es que se puede quedar estancada al avanzar por una ruta equivocada, ya que muchos árboles de búsqueda pueden ser muy profundos o infinitos. Por lo tanto, la BPPP no es ni la mas completa ni la más óptima.
 sobre la búsqueda preferente por amplitud (DFS). La desventaja de esta búsqueda es que se puede quedar estancada al avanzar por una ruta equivocada, ya que muchos árboles de búsqueda pueden ser muy profundos o infinitos. Por lo tanto, la BPPP no es ni la mas completa ni la más óptima.")
46
Resumen (DFS) Los nodos se visitan y generan buscando los nodos a mayor profundidad y retrocediendo cuando no se encuentran nodos sucesores La estructura para los nodos abiertos es una pila (LIFO) Para garantizar que el algoritmo acaba debe imponerse un límite en la profundidad de exploración Características Completidud: El algoritmo encuentra una solución si se impone un límite de profundidad y existe una solución dentro de ese límite Complejidad temporal: Exponencial respecto al factor de ramificación y la profundidad del límite de exploración O(bm). Complejidad espacial: Si no se controlan los nodos repetidos el coste es lineal respecto al factor de ramificación y el límite de profundidad O(bm). Si tratamos repetidos el coste es igual que en anchura. Si la implementación es recursiva el coste es O(m). Optimalidad: No se garantiza que la solución sea óptima
 Para garantizar que el algoritmo acaba debe imponerse un límite en la profundidad de exploración. Características. Completidud: El algoritmo encuentra una solución si se impone un límite de profundidad y existe una solución dentro de ese límite. Complejidad temporal: Exponencial respecto al factor de ramificación y la profundidad del límite de exploración O(bm). Complejidad espacial: Si no se controlan los nodos repetidos el coste es lineal respecto al factor de ramificación y el límite de profundidad O(bm). Si tratamos repetidos el coste es igual que en anchura. Si la implementación es recursiva el coste es O(m). Optimalidad: No se garantiza que la solución sea óptima.")
47
Ejercicio 4 Considere el siguiente gráfico. Los nodos sombreados ya fueron visitados y se han extendido. Dibuje el árbol de la búsqueda que corresponde a este gráfico, dónde la búsqueda se inició en A y se expandió hasta R, y puede visitar un nodo en el gráfico más de una vez. Indicar el borde en el árbol de búsqueda. ¿En BFS, qué nodo se extendería? ¿En UCS, qué nodo se extendería? ¿En DFS, qué nodo se extendería?

48
Ejercicio 5 Imagine un escenario con un robot que intenta navegar en el siguiente laberinto desde (S) hasta la meta (G). A cada paso, el robot puede seguir una de las cuatro direcciones del compas. El robot contempla las alternativas en el orden siguiente: Moverse al Sur Moverse al Este Moverse al Norte Moverse al Oeste Formula el problema como un problema de búsqueda. Marcar el conjunto de estados que se expanden durante la búsqueda, en el orden ellos se expanden, colocando un “1” en el primer estado, un “2” por el segundo, y así sucesivamente (Pon “1” en la celda marcada como S). Asume que la búsqueda es Primero en Profundidad (DFS). Use la versión de DFS que evita los ciclos y el re-expansión de un estado que está en el camino actual. Usando la misma notación marca el conjunto de estados que el BFS puede expandir, en el orden en el cual son expandidos.
 hasta la meta (G). A cada paso, el robot puede seguir una de las cuatro direcciones del compas. El robot contempla las alternativas en el orden siguiente: Moverse al Sur. Moverse al Este. Moverse al Norte. Moverse al Oeste. Formula el problema como un problema de búsqueda. Marcar el conjunto de estados que se expanden durante la búsqueda, en el orden ellos se expanden, colocando un 1 en el primer estado, un 2 por el segundo, y así sucesivamente (Pon 1 en la celda marcada como S). Asume que la búsqueda es Primero en Profundidad (DFS). Use la versión de DFS que evita los ciclos y el re-expansión de un estado que está en el camino actual. Usando la misma notación marca el conjunto de estados que el BFS puede expandir, en el orden en el cual son expandidos.")
49
Búsqueda limitada por profundidad (DLS)
")
50
Búsqueda limitada por profundidad
Con esta búsqueda se eliminan las dificultades de la búsqueda preferente por profundidad, al imponer un límite a la profundidad máxima de una ruta. El establecer este límite es difícil, ya que no conocemos mucho sobre el espacio de estados. La búsqueda limitada puede no ser completa ni óptima: un límite de profundidad muy pequeño puede que no contenga la solución, y uno muy grande puede que contenga soluciones no óptimas que son encontradas primero. La complejidad espacio-temporal de la búsqueda limitada por profundidad es similar a la de la búsqueda preferente por profundidad: requiere un tiempo de O(bl) y un espacio O(bl), donde l es el límite de profundidad.
 y un espacio O(bl), donde l es el límite de profundidad.")
51
Búsqueda por profundización iterativa (IDS)
")
52
Búsqueda por profundización iterativa
Elimina la dificultad de elegir un límite adecuado de profundidad en la búsqueda limitada por profundidad. Lo anterior lo hace probando todos los límites de profundidad posibles, primero la profundidad 0, luego la 1, luego la 2, etc. En la profundización iterativa se combinan las ventajas de las búsquedas preferente por profundidad y preferente por amplitud. Es óptima y completa, como la búsqueda preferente por amplitud, pero la memoria que necesita es la de la búsqueda preferente por profundidad.

53
Búsqueda por profundización iterativa
Función Búsqueda-por-profundización-iterativa(problema) responde con una secuencia de solución. entradas: problema, un problema. para profundidad 0 a hacer si Búsqueda-limitada-por-profundidad(problema, profundidad) tiene éxito, entregue el resultado obtenido fin-para responda con falla
 responde con una secuencia de solución. entradas: problema, un problema. para profundidad 0 a hacer. si Búsqueda-limitada-por-profundidad(problema, profundidad) tiene éxito, entregue el. resultado obtenido. fin-para. responda con falla.")
54
Búsqueda por profundización iterativa
Límite = 0 Límite = 1 Límite = 2 Límite = 3 ...

55
Búsqueda por profundización iterativa
La búsqueda por profundización iterativa puede parecer un desperdicio, por repetir expansiones de estados, pero en la mayoría de los problemas esta expansión múltiple es realmente pequeña. La complejidad temporal sigue siendo O(bd) y la complejidad espacial es O(bd). La profundización iterativa es el método idóneo para aquellos casos donde el espacio de búsqueda es grande y se ignora la profundidad de la solución.
 y la complejidad espacial es O(bd). La profundización iterativa es el método idóneo para aquellos casos donde el espacio de búsqueda es grande y se ignora la profundidad de la solución.")
56
Búsqueda Bidireccional (BS)
")
57
Búsqueda bidireccional
Es básicamente una búsqueda simultánea que avanza a partir del estado inicial y que retrocede a partir de la meta y que se detiene cuando ambas búsquedas se encuentran en algún punto intermedio. Si en un problema el factor de ramificación b es el mismo en ambas direcciones, la búsqueda bidireccional puede ser muy útil. Si la solución está a profundidad d, entonces la solución estará a O(2bd/2) = O(bd/2) pasos
 = O(bd/2) pasos.")
58
Cuestiones a resolver La búsqueda hacia atrás implica la sucesiva generación de predecesores a partir del nodo meta. Si todos los operadores son reversibles, los conjuntos de predecesor y sucesor son idénticos, pero en algunos problemas, el cálculo de los predecesores puede resultar muy difícil. Si hay varios estados meta listados en forma explícita, se puede aplicar una función de predecesor al conjunto de estados como en el caso de la búsqueda de estado múltiple. Pero si sólo hay una descripción de los estados meta, es realmente difícil (¿qué estados son predecesores del jaque mate en ajedrez?) Se requiere una manera eficiente de verificar cada uno de los nodos nuevos para ver si ya están en el otro árbol. Se tiene que definir un tipo de búsqueda para cada mitad. Amplitud – amplitud, amplitud – profundidad, etc. La complejidad espacial es igual a la temporal para esta búsqueda.
 Se requiere una manera eficiente de verificar cada uno de los nodos nuevos para ver si ya están en el otro árbol. Se tiene que definir un tipo de búsqueda para cada mitad. Amplitud – amplitud, amplitud – profundidad, etc. La complejidad espacial es igual a la temporal para esta búsqueda.")
59
Bibliografía AIMA. Capítulo 3, primera edición.
AIMA. Chapter 3, second edition.

60
PREGUNTAS

Presentaciones similares












 Noviembre de 2004.>")







