Descargar la presentación
La descarga está en progreso. Por favor, espere

1
4 ANÁLISIS DE PRESTACIONES EN AUTOMÓVILES
4.1. NEUMATICOS 4.2. RESISTENCIA AL AVANCE 4.3. POTENCIA NECESARIA 4.4. RELACIÓN DE TRANSMISIÓN 4.5. CURVAS CARACTERISTICAS 4.6. ADHERENCIA 4.7. DIMENSIONAMIENTO ENERGÉTICO 4.8. CICLOS DE FUNCIONAMIENTO

2
4.1. NEUMÁTICOS Leyenda de denominación de neumático
ANCHURA DE LA SECCIÓN RELACIÓN DE ASPECTO DIAMETRO DE LA LLANTA INDICE DE VELOCIDAD CONSTITUCIÓN DEL NEUMATICO Leyenda de denominación de neumático

3
1) Anchura de la sección. Anchura de la sección del neumático sin deformar, (mm).
2) Diámetro de la llanta. Diámetro de la llanta del neumático (pulgadas) (“). 3) Relación de aspecto o perfil. Relación entre la altura y la anchura de la sección del neumático. Se expresa en tanto por ciento (%). 4) Altura de la sección. Altura de la sección del neumático, (mm). 5) Diámetro exterior de la rueda. Diámetro exterior del neumático sin deformar, (mm). Se suma a la llanta, el valor de la altura de la sección multiplicado por dos. 6) Constitución del neumático. Factor que depende de la resistencia a la rodadura. Usualmente hay dos posibilidades : - R = radial (menor resistencia a la rodadura) - D = diagonal (normalmente para camiones y tractores)
 Diámetro de la llanta. Diámetro de la llanta del neumático (pulgadas) ( ). 3) Relación de aspecto o perfil. Relación entre la altura y la anchura de la sección del neumático. Se expresa en tanto por ciento (%). 4) Altura de la sección. Altura de la sección del neumático, (mm). 5) Diámetro exterior de la rueda. Diámetro exterior del neumático sin deformar, (mm). Se suma a la llanta, el valor de la altura de la sección multiplicado por dos. 6) Constitución del neumático. Factor que depende de la resistencia a la rodadura. Usualmente hay dos posibilidades : - R = radial (menor resistencia a la rodadura) - D = diagonal (normalmente para camiones y tractores)")
4
7) Índice de velocidad. Nos indica el rango de velocidad para el cual ha sido diseñado el neumático. Existen varias posibilidades en función de la velocidad : S = velocidad < 200 Km/h H = velocidad hasta 210 Km/h V = velocidad hasta 240 Km/h Z = velocidad > 240 Km/h 8) Índice de carga. Nos indica la carga de presión de inflado del neumático. Para calcular la carga máxima sobre cada una de las ruedas expresada en Kg se aplica la fórmula siguiente : Pmax = 45 x (1.0292)n donde n es el índice de carga 9) Radio de la rueda en carga. Radio del neumático deformado debido a la carga. Se suele establecer un porcentaje sobre el radio de la rueda sin deformar, que suele estar alrededor del 90%.
 Índice de carga. Nos indica la carga de presión de inflado del neumático. Para calcular la carga máxima sobre cada una de las ruedas expresada en Kg se aplica la fórmula siguiente : Pmax = 45 x (1.0292)n donde n es el índice de carga. 9) Radio de la rueda en carga. Radio del neumático deformado debido a la carga. Se suele establecer un porcentaje sobre el radio de la rueda sin deformar, que suele estar alrededor del 90%.")
5
Ejemplo 1. Determinar las características principales de un neumático cuya leyenda es:
145/70 SR 13 (suponed un índice de carga de 76). 1) anchura de la sección = 145 mm. 2) diámetro de la llanta = 13” mm. 3) relación de aspecto ó perfil = 70% 0.7 4) altura de la sección = perfil x anchura = 0.7 x 145 = mm 5) diámetro de la rueda = diámetro de la llanta + 2 x altura = x = mm 6) constitución del neumático = R radial 7) índice de velocidad = S para velocidades < 200 Km/h 8) índice de carga = 76 Pmax = 45 x (1.0292)76 = Kg. 9) radio de la rueda en carga = 0.9 x 533.2/2 = 0.9 x = mm.
. 1) anchura de la sección = 145 mm. 2) diámetro de la llanta = mm. 3) relación de aspecto ó perfil = 70% ) altura de la sección = perfil x anchura = 0.7 x 145 = mm. 5) diámetro de la rueda = diámetro de la llanta + 2 x altura. = x = mm. 6) constitución del neumático = R radial. 7) índice de velocidad = S para velocidades < 200 Km/h. 8) índice de carga = 76 Pmax = 45 x (1.0292)76 = Kg. 9) radio de la rueda en carga = 0.9 x 533.2/2 = 0.9 x = mm.")
6
4.2 RESISTENCIA AL AVANCE La resistencia al avance se compone de : resistencia a la rodadura (Rr), resistencia aerodinámica (Ra), y resistencia a pendientes (Rp). RT = Rr + Ra + Rp (4.1) Resistencia a la rodadura. Es la debida a la rodadura y producida por la deformación del neumático. La forma de calcularla es : Rr = m · P (4.2) donde : m = coeficiente de rodadura P = peso del vehículo (peso de vacío + carga útil máxima) en Kg Este coeficiente de rodadura se puede calcular por dos métodos, de los cuales se suele elegir el mas desfavorable .
, resistencia aerodinámica (Ra), y resistencia a pendientes (Rp). RT = Rr + Ra + Rp (4.1) Resistencia a la rodadura. Es la debida a la rodadura y producida por la deformación del neumático. La forma de calcularla es : Rr = m · P (4.2) donde : m = coeficiente de rodadura. P = peso del vehículo (peso de vacío + carga útil máxima) en Kg. Este coeficiente de rodadura se puede calcular por dos métodos, de los cuales se suele elegir el mas desfavorable .")
7
a) Criterio válido sólo para velocidades 100 Km/h. m = m0 + k · v2 (4
donde : m0 = coeficiente de rodadura dependiente del firme : cemento = empedrado seco = 0.015 asfalto = 0.02 a 0.03 natural duro = 0.08 natural blando = 0.11 arenoso = 0.15 a 0.3 P = peso del vehículo (peso de vacío + carga útil máxima) en Kg k = 0, (Km/h)-2 v = velocidad en Km/h b) Por la fórmula recomendada por SAE. m = (4.4) donde : k1 = coeficiente de constitución del neumático = 0.8 para neumáticos radiales = 1.0 para neumáticos diagonales PR = peso por rueda (t) pn = presión de los neumáticos en atmósferas (Kg/cm2)
 en Kg. k = 0, (Km/h)-2. v = velocidad en Km/h. b) Por la fórmula recomendada por SAE. m = (4.4) donde : k1 = coeficiente de constitución del neumático. = 0.8 para neumáticos radiales. = 1.0 para neumáticos diagonales. PR = peso por rueda (t) pn = presión de los neumáticos en atmósferas (Kg/cm2)")
8
Resistencia aerodinámica
Resistencia aerodinámica. Es la debida al rozamiento con el aire y producida a altas velocidades. La forma de calcularla es : Ra = (4.5) donde : Cx = coeficiente de penetración aerodinámica (0.3 a 0.4) S = superficie frontal del vehículo (m2) v = velocidad en m/s Cuando el cálculo de la superficie frontal es costoso de obtener se puede realizar la siguiente aproximación : S = 0.85 · a · b (4.6) Medidas generales para la definición de la superficie frontal.
 donde : Cx = coeficiente de penetración aerodinámica (0.3 a 0.4) S = superficie frontal del vehículo (m2) v = velocidad en m/s. Cuando el cálculo de la superficie frontal es costoso de obtener se puede realizar la siguiente aproximación : S = 0.85 · a · b (4.6) Medidas generales para la definición de la superficie frontal.")
9
Resistencia a las pendientes
Resistencia a las pendientes. Es la debida al superar una pendiente del firme. La forma de calcularla es : Rp = P · sen a = P · n / 100 (4.7) donde : P = peso del vehículo (peso de vacío + carga útil máxima) en Kg n = pendiente a superar en % Determinación de la pendiente superable. La pendiente a superar se establece en un tramo de 100 metros. Así se suele denominar como pendiente del x %, al valor de x en un tramo de 100 metros.
 donde : P = peso del vehículo (peso de vacío + carga útil máxima) en Kg. n = pendiente a superar en % Determinación de la pendiente superable. La pendiente a superar se establece en un tramo de 100 metros. Así se suele denominar como pendiente del x %, al valor de x en un tramo de 100 metros.")
10
4.3. POTENCIA NECESARIA Es la potencia que es necesario instalar en el vehículo para poder vencer la resistencia total al avance. Existen dos alternativas : 1. Calcular la potencia necesaria para subir la máxima pendiente a la velocidad máxima. 2. Definir una velocidad máxima para subir la pendiente máxima, la cual será diferente de la velocidad máxima del vehículo. La forma de calcularla es la siguiente : (CV) (4.8) donde : Pw = potencia (CV) RT = resistencia al avance total (Kg) v = velocidad (m/s) hT = rendimiento de la transmisión (0.8 a 0.85) Calculada la potencia se elige el motor capaz de proporcionar dicha potencia.
 (4.8) donde : Pw = potencia (CV) RT = resistencia al avance total (Kg) v = velocidad (m/s) hT = rendimiento de la transmisión (0.8 a 0.85) Calculada la potencia se elige el motor capaz de proporcionar dicha potencia.")
11
4.4. RELACIÓN DE TRANSMISIÓN
Es la relación que nos permite establecer la variación de las velocidades que puede adquirir el vehículo. Se adopta el criterio de cálculo que permite pasar de revoluciones por minuto para la máxima potencia a revoluciones por minuto para máximo par. La velocidad del vehículo la podemos expresar como : (4.9) con nm = ri · rf · nr (4.10) donde : v = velocidad (m/s) Rd = radio de la rueda en carga (m) nr = número de revoluciones por minuto de la rueda (r.p.m.) nm = número de revoluciones por minuto del motor (r.p.m.) ri = reducción de la caja de cambios rf = reducción del diferencial La reducción del diferencial o reducción fija se calcula como : (4.11)
 con nm = ri · rf · nr (4.10) donde : v = velocidad (m/s) Rd = radio de la rueda en carga (m) nr = número de revoluciones por minuto de la rueda (r.p.m.) nm = número de revoluciones por minuto del motor (r.p.m.) ri = reducción de la caja de cambios. rf = reducción del diferencial. La reducción del diferencial o reducción fija se calcula como : (4.11)")
12
Las reducciones de la caja de cambios se calculan hacia atrás, es decir, desde la última velocidad (velocidad larga) hasta la primera (velocidad corta). Se buscan unas relaciones de cambio que permitan la máxima aceleración. El criterio de cálculo adoptado es calcularlas de tal forma que en cada cambio de marcha, el régimen de potencia máxima en la marcha saliente coincida con el régimen de par máximo en la marcha entrante. Así, el proceso comienza asignando como marcha directa, la última de las velocidades seleccionadas en función del número de marchas con que queremos dotar al vehículo, adoptando entonces el valor de ri = 1. De esta manera se puede calcular la relación del diferencial en el caso de la velocidad máxima, que se producirá en esta marcha. Si denominamos n2 = r.p.m. a máxima potencia n1 = r.p.m. a máximo par (4.12)
")
13
Las relaciones de transmisión de las otras velocidades se calculan de forma que :
r.p.m. [Potencia máxima (marcha i)] = r.p.m. [Par máximo (marcha i+1)] Por lo tanto : n2 (vi) = n1 (vi+1) (4.13) Con lo que : (4.14) que nos da la fórmula para calcular la relación de reducción de cada marcha en función de la siguiente y la velocidad máxima para cada una de las marchas se obtendrá con la expresión siguiente : (4.15)
] = r.p.m. [Par máximo (marcha i+1)] Por lo tanto : n2 (vi) = n1 (vi+1) (4.13) Con lo que : (4.14) que nos da la fórmula para calcular la relación de reducción de cada marcha en función de la siguiente y la velocidad máxima para cada una de las marchas se obtendrá con la expresión siguiente : (4.15)")
14
Ejemplo 2. Calcular las relaciones de reducción y las velocidades máximas en cada marcha de un vehículo con 5 marchas, donde la relación directa se produce en la cuarta marcha. Comenzaremos por calcular la relación fija o la del diferencial : Para ello sabemos que r4 = 1

15
Donde la velocidad máxima a marcha atrás se suele estimar entre 30 y 50 Km/h y la velocidad máxima en la 5ª marcha en un valor de diseño. Las velocidades máximas en cada marcha serán :

16
4.5. CURVAS CARACTERÍSTICAS
4.5.1 CURVAS CARACTERÍSTICAS DEL MOTOR Definen las características del motor seleccionado y representan la potencia y el par para cada valor de la velocidad del motor. Permiten evaluar las prestaciones del vehículo. Son : potencia en función de las revoluciones del motor y par en función de las revoluciones del motor. La relación entre potencia y par viene determinado por la fórmula siguiente : (4.29) Para poder realizar la elección de las prestaciones del vehículo se elige un motor que la potencia máxima a un número de revoluciones (n2) que a su vez entregará un par máximo a un número de revoluciones (n1). Pw = Mmax · (4.30) M = Pwmax · (4.31)
 Para poder realizar la elección de las prestaciones del vehículo se elige un motor que la potencia máxima a un número de revoluciones (n2) que a su vez entregará un par máximo a un número de revoluciones (n1). Pw = Mmax · (4.30) M = Pwmax · (4.31)")
17
Ejemplo de curvas potencia-par para un motor térmico y curvas potencia-par-resistencia al avance en un motor eléctrico.

18
Diferencia de las curvas de par para motores eléctricos y térmicos.
La diferencia entre un motor eléctrico (por ejemplo motor de corriente continua) y un motor térmico de combustión interna se establece sobre todo en la relación de potencia y par. El motor eléctrico desarrolla par máximo al arrancar decreciendo el par a medida que aumenta la velocidad. El motor térmico da par máximo a una determinada velocidad, disminuyendo este par por debajo y por encima de dicha velocidad. Diferencia de las curvas de par para motores eléctricos y térmicos. El motor térmico, para aumentar su par a baja velocidad, requiere de un convertidor de par o caja de cambios. El motor eléctrico, si dispone de una batería de alta capacidad, no requerirá este convertidor de par, pues dispone de un par de arranque bastante elevado. En un automóvil eléctrico, la intensidad de descarga de la batería es proporcional al par producido por el motor (en este caso de corriente continua).
 y un motor térmico de combustión interna se establece sobre todo en la relación de potencia y par. El motor eléctrico desarrolla par máximo al arrancar decreciendo el par a medida que aumenta la velocidad. El motor térmico da par máximo a una determinada velocidad, disminuyendo este par por debajo y por encima de dicha velocidad. Diferencia de las curvas de par para motores eléctricos y térmicos. El motor térmico, para aumentar su par a baja velocidad, requiere de un convertidor de par o caja de cambios. El motor eléctrico, si dispone de una batería de alta capacidad, no requerirá este convertidor de par, pues dispone de un par de arranque bastante elevado. En un automóvil eléctrico, la intensidad de descarga de la batería es proporcional al par producido por el motor (en este caso de corriente continua).")
19
Si la batería es de baja capacidad o su resistencia es elevada, al requerírsele al motor altos esfuerzos de tracción, este demanda mas intensidad de la batería, descargándola de forma rápida. Es por ello por lo que en ocasiones para obtener una mayor eficiencia del sistema, se instalan cajas de cambios en los automóviles eléctricos para que se reduzca la intensidad de descarga de la batería. Potencia-par para un vehículo eléctrico con caja de cambios mecánica de dos marchas. No existe ninguna regla para definir cual es la transmisión mas conveniente en un vehículo eléctrico.

20
Se pueden realizar transmisiones directas, automáticas con varias velocidades y transmisión manual de varias velocidades. Sólo la inversión de la marcha es preferible realizarla de forma eléctrica. Los equipos electrónicos de control son suficientes para variar adecuadamente el par y la velocidad de los motores de tracción eléctricos. Sin embargo para motores de alto par y baja velocidad, se requiere una transmisión mecánica de manera que disminuya el consumo de corriente y aumente el margen de velocidad. Tampoco existen reglas sobre el número de velocidades, el tipo de cambios de marcha o el tipo de embrague si la transmisión es mecánica. Lo mas aconsejable en un automóvil eléctrico es una transmisión con velocidad variable, que pudiera mantener el consumo de corriente a un nivel mínimo, que suministre el máximo par para la aceleración y que aumentase las ventajas del frenado regenerativo.

21
Curvas de consumo y potencia frente a la velocidad en un motor eléctrico con una transmisión mecánica de dos velocidades. El problema proviene de que algunos motores eléctricos a baja velocidad, poseen un consumo muy elevado de corriente al dar pares elevados, lo que se traduce en perdidas de calor que son proporcionales al cuadrado de la intensidad y producen una reducción de la autonomía del vehículo.

22
Curva esfuerzo velocidad
con control completamente electrónico. Curva esfuerzo velocidad con caja automática de tres velocidades y control de campo

23
4.5.2 CURVAS DE RESISTENCIA AL AVANCE
Son las curvas que representan la resistencia al avance del vehículo en función de la velocidad del mismo y de la pendiente superable. Estas curvas, dado el peso del vehículo, se calculan con la ecuación siguiente : RT = K1 + K2 v2 + K3 n (4.32) donde : K1 = constante que depende de la resistencia a la rodadura K2 = constante que depende de la resistencia aerodinámica K3 = constante que depende de la resistencia a la pendientes v = velocidad del vehículo en m/s n = pendiente superable en % la definición de cada una de estas constantes es como sigue : K1 = m · P (4.33) K2 = (4.34) K3 = P/100 (4.35) donde : m = coeficiente de rodadura P = peso del vehículo (Kg) Cx = coeficiente de penetración aerodinámica S = superficie frontal del vehículo (m2)
 donde : K1 = constante que depende de la resistencia a la rodadura. K2 = constante que depende de la resistencia aerodinámica. K3 = constante que depende de la resistencia a la pendientes. v = velocidad del vehículo en m/s. n = pendiente superable en % la definición de cada una de estas constantes es como sigue : K1 = m · P (4.33) K2 = (4.34) K3 = P/100 (4.35) donde : m = coeficiente de rodadura. P = peso del vehículo (Kg) Cx = coeficiente de penetración aerodinámica. S = superficie frontal del vehículo (m2)")
24
Curvas de resistencia al avance en función de la velocidad y la pendiente.

25
4.5.3 GRÁFICAS DE LA CAJA DE CAMBIOS
Con estas gráficas se pretende representar las revoluciones del motor en función de la velocidad adquirida por el vehículo para cada una de las marchas que se han diseñado. Teniendo en cuenta que el diseño de cada marcha se ha realizado para las revoluciones del motor a máxima potencia y a par máximo, el valor ideal de cambio de una marcha a otra viene representado en la línea mas gruesa de la gráfica siguiente. La fórmula aplicada es la siguiente : (4.36)
")
26
4.5.4 ESFUERZO MOTRIZ. CURVA FUERZA-VELOCIDAD
Conocidos todos los datos necesarios para determinar el motor, el paso siguiente consiste en conocer el esfuerzo que se precisa en la rueda en función de la velocidad lineal del vehículo. La ecuación que define este concepto es la siguiente : Mr = Mm · ri · rf · hT = F · Rd (4.37) donde : Mr = par desarrollado en la rueda (Nm) Mm = par desarrollado en el motor (Nm) F = esfuerzo motriz en llanta (N) hT = rendimiento de la transmisión ri = relación de reducción en el diferencial rf = relación de reducción de la caja de cambios Rd = radio de la rueda (m)
 donde : Mr = par desarrollado en la rueda (Nm) Mm = par desarrollado en el motor (Nm) F = esfuerzo motriz en llanta (N) hT = rendimiento de la transmisión. ri = relación de reducción en el diferencial. rf = relación de reducción de la caja de cambios. Rd = radio de la rueda (m)")
27
De la ecuación anterior se puede despejar el valor del esfuerzo motriz en llanta :
(4.38) Por otra parte la expresión de la velocidad lineal del vehículo en función de las revoluciones por minuto del motor toma la forma : (4.39) Con estas dos ecuaciones se dibujan las gráficas de las curvas fuerza-velocidad que se obtienen a partir de varios puntos para cada velocidad, obteniéndose de esta manera una serie de pares de valores F-V que se representan y dan lugar a las mencionadas gráficas.
 Por otra parte la expresión de la velocidad lineal del vehículo en función de las revoluciones por minuto del motor toma la forma : (4.39) Con estas dos ecuaciones se dibujan. las gráficas de las curvas fuerza-velocidad. que se obtienen a partir de varios puntos. para cada velocidad, obteniéndose. de esta manera una serie de pares. de valores F-V que se representan. y dan lugar a las mencionadas gráficas.")
28
4.5.5 MÁXIMA PENDIENTE SUPERABLE
El valor de la máxima pendiente superable por el vehículo puede obtenerse de la intersección de las curvas de resistencia al avance y las curvas del esfuerzo motriz o curvas fuerza-velocidad. Como de las curvas del esfuerzo motriz se puede conocer el máximo que se dará en la primera velocidad, se halla la intersección con la curva de resistencia al avance, que será la máxima superable por el vehículo. La máxima pendiente superable por el vehículo se dará a una baja velocidad y donde solo influya la resistencia a las pendiente, es decir : RT = K1 + K2 v2 + K3 n (4.40) Rmax = (4.41) En la figura se obtiene gráficamente :
 Rmax = (4.41) En la figura se obtiene gráficamente :")
29
ACELERACIONES Para evaluar las prestaciones del vehículo, una de los estudios mas importantes es el de la capacidad de aceleración. La capacidad de aceleración (g) depende de la diferencia entre la fuerza motriz y la resistencia al avance, así como de la masa del automóvil. Para poder realizar esta evaluación de las aceleraciones es preciso definir una masa equivalente (me) que corresponde a la masa del vehículo mas las inercias de los elementos que giran. Para tener en cuenta la inercia de los elementos que giran se suele tomar este término como un 1% de la masa total del vehículo (P). me = P P = 1.01 P (4.42)
 depende de la diferencia entre la fuerza motriz y la resistencia al avance, así como de la masa del automóvil. Para poder realizar esta evaluación de las aceleraciones es preciso definir una masa equivalente (me) que corresponde a la masa del vehículo mas las inercias de los elementos que giran. Para tener en cuenta la inercia de los elementos que giran se suele tomar este término como un 1% de la masa total del vehículo (P). me = P P = 1.01 P (4.42)")
30
El proceso comienza con un análisis de la aceleración del vehículo en el intervalo de 0 a 100 Km/h.
1) En primer lugar se halla para cada marcha las curvas fuerza-velocidad que da una idea de la capacidad de aceleración en cada situación. (En la figura siguiente se puede ver los valores que se obtienen de dichas curvas, de las que se suelen tomar tres valores de la velocidad para cada una de las marchas). (La resistencia total al avance se fija con una pendiente del 0 %)
 En primer lugar se halla para cada marcha las curvas fuerza-velocidad que da una idea de la capacidad de aceleración en cada situación. (En la figura siguiente se puede ver los valores que se obtienen de dichas curvas, de las que se suelen tomar tres valores de la velocidad para cada una de las marchas). (La resistencia total al avance se fija con una pendiente del 0 %)")
31
2) En segundo lugar se aplica la 2ª ley de Newton para determinar la aceleración tomando valores de dichas curvas con la siguiente expresión : (4.43) donde : Fi = fuerza motriz en llanta para esa situación (N) RTi = resistencia total al avance (N) me = masa equivalente (Kg) De las curvas se obtienen para cada marcha los correspondientes valores de aceleración en tres puntos diferentes de la curva y con ellos se obtienen las inversas correspondientes, con las que se calcula el valor medio: marcha 1ª Þ (4.44) marcha 2ª ... marcha 3ª ... marcha 4ª ...
 donde : Fi = fuerza motriz en llanta para esa situación (N) RTi = resistencia total al avance (N) me = masa equivalente (Kg) De las curvas se obtienen para cada marcha los correspondientes valores de aceleración en tres puntos diferentes de la curva y con ellos se obtienen las inversas correspondientes, con las que se calcula el valor medio: marcha 1ª Þ. (4.44) marcha 2ª ... marcha 3ª ... marcha 4ª ...")
32
Curva inversa de la aceleración-velocidad.
3) Una vez obtenido estos valores se puede realizar una nueva gráfica en donde se representa la inversa de la aceleración frente a la velocidad, como se ve en la figura siguiente : Curva inversa de la aceleración-velocidad. Con la curva inversa de la aceleración-velocidad, se puede ver mas claramente las prestaciones en cuanto a capacidad de aceleración y recuperación que se mide en términos de tiempo.
 Una vez obtenido estos valores se puede realizar una nueva gráfica en donde se representa la inversa de la aceleración frente a la velocidad, como se ve en la figura siguiente : Curva inversa de la aceleración-velocidad. Con la curva inversa de la aceleración-velocidad, se puede ver mas claramente las prestaciones en cuanto a capacidad de aceleración y recuperación que se mide en términos de tiempo.")
33
De esta manera se pueden calcular los tiempos de aceleración del vehículo de 0 a 100 Km/h ó el tiempo de recuperación de una velocidad a otra, sin mas que calcular el área que hay debajo de la curva y limitada por los valores de velocidad que establezcamos mediante integración numérica. La justificación de este hecho proviene de la ecuación de la aceleración : (4.45) t va®vb = (4.46) En la figura siguiente se puede apreciar tres casos de análisis como pueden ser el tiempo de aceleración de 0 a 100 Km/h, el tiempo de recuperación de 60 a 100 Km/h en 5ª marcha o el tiempo de recuperación de 40 a 100 Km/h en 4ª marcha. (4.47)
 t va®vb = (4.46) En la figura siguiente se puede apreciar tres casos de análisis como pueden ser el tiempo de aceleración de 0 a 100 Km/h, el tiempo de recuperación de 60 a 100 Km/h en 5ª marcha o el tiempo de recuperación de 40 a 100 Km/h en 4ª marcha. (4.47)")
34
Obtención de los tiempos de recuperación y aceleración

35
4.5.7 CURVA VELOCIDAD-TIEMPO
Integrando la curva inversa de la aceleración-velocidad (1/g - v), para diferentes valores de velocidad, se van obteniendo los tiempos en los que se alcanzan esas velocidades. Como el criterio de diseño es el de cambiar de marcha al alcanzar el régimen de potencia máxima de la relación saliente para llegar al par máximo de la velocidad entrante, la curva que se obtiene tiene forma casi continua como se ve en la figura siguiente :
, para diferentes valores de velocidad, se van obteniendo los tiempos en los que se alcanzan esas velocidades. Como el criterio de diseño es el de cambiar de marcha al alcanzar el régimen de potencia máxima de la relación saliente para llegar al par máximo de la velocidad entrante, la curva que se obtiene tiene forma casi continua como se ve en la figura siguiente :")
36
Se supone que el cambio de una marcha a otra se realiza en 1 o 2 segundos. Se obtiene entonces el tiempo para alcanzar una determinada velocidad. Es decir : (4.48) Según el gráfico se calcula el tiempo para llegar a cada una de las velocidades : marcha 1ª va ® ta (1/g1)media t vb®va = (vb - va) · (1/g1)media vb ® tb marcha 2ª vc ® tc (1/g2)media t vd®vc = (vd - vc) · (1/g2)media vd ® td marcha 3ª ve ® te (1/g3)media t vf®ve = (vf - ve) · (1/g3)media vf ® tf marcha 4ª vg ® tg (1/g4)media t vh®vg = (vh - vg) · (1/g4)media vh ® th Si se quisiera calcular un tiempo determinado en alcanzar una determinada velocidad (por ejemplo la máxima) a una determinada marcha (por ejemplo la cuarta), operaríamos de la siguiente manera : t 0®100 = (vmax - vg) · (1/g4)media + tg (4.49)
 Según el gráfico se calcula el tiempo para llegar a cada una de las velocidades : marcha 1ª va ® ta (1/g1)media t vb®va = (vb - va) · (1/g1)media. vb ® tb. marcha 2ª vc ® tc (1/g2)media t vd®vc = (vd - vc) · (1/g2)media. vd ® td. marcha 3ª ve ® te (1/g3)media t vf®ve = (vf - ve) · (1/g3)media. vf ® tf. marcha 4ª vg ® tg (1/g4)media t vh®vg = (vh - vg) · (1/g4)media. vh ® th. Si se quisiera calcular un tiempo determinado en alcanzar una determinada velocidad (por ejemplo la máxima) a una determinada marcha (por ejemplo la cuarta), operaríamos de la siguiente manera : t 0®100 = (vmax - vg) · (1/g4)media + tg (4.49)")
37
4.6 ADHERENCIA En el capítulo de adherencia se va a analizar los cuatro características mas importantes para analizar la adherencia del vehículo al piso y que son : - aceleración máxima - máxima pendiente superable - velocidad máxima para una curva de radio dado - comprobación de posibilidad de vuelco Para el análisis de adherencia haremos las siguientes suposiciones y utilizaremos la siguiente notación : - se supone el peso equi-repartido en los dos ejes, (depende del tipo de tracción) - masa del vehículo : m - peso del vehículo : P - centro de gravedad : cdg - altura centro de gravedad : hcdg - batalla: d - distancia del eje delantero al cdg : a - distancia del eje trasero al cdg : b - coeficiente de adherencia : ma - coeficiente resistencia a rodadura : m
 - masa del vehículo : m - peso del vehículo : P - centro de gravedad : cdg - altura centro de gravedad : hcdg - batalla: d - distancia del eje delantero al cdg : a - distancia del eje trasero al cdg : b - coeficiente de adherencia : ma - coeficiente resistencia a rodadura : m")
38
4.6.1 ESTUDIO DE LAS ACELERACIONES MÁXIMAS
Las aceleraciones y deceleraciones máximas en un vehículo se van a producir en la aceleración de salida y en la frenada. Frenada. Se calcula la máxima fuerza de frenada por condiciones de adherencia y por condiciones de dinámica : Fmax = P · ma = m · g · ma (4.50) Fmax = m · g deceleración max (4.51) Igualando las dos ecuaciones anteriores se obtiene el valor de la deceleración máxima : g deceleración max = g · ma (4.52) Obtenida la deceleración máx. se obtiene la distancia de frenada para una velocidad inicial dada. Para calcular la distancia de frenada (D) de vi a vf (vf = 0) calcularemos 1º el tiempo de frenada (t). Para calcular la máxima distancia de frenada, supondremos que la velocidad inicial es la máxima velocidad del vehículo (vi = vmax). (4.53) (4.54)
 Fmax = m · g deceleración max (4.51) Igualando las dos ecuaciones anteriores se obtiene el valor de la deceleración máxima : g deceleración max = g · ma (4.52) Obtenida la deceleración máx. se obtiene la distancia de frenada para una velocidad inicial dada. Para calcular la distancia de frenada (D) de vi a vf (vf = 0) calcularemos 1º el tiempo de frenada (t). Para calcular la máxima distancia de frenada, supondremos que la velocidad inicial es la máxima velocidad del vehículo (vi = vmax). (4.53) (4.54)")
39
Esquema de las fuerzas que actúan.
Máxima aceleración. Para calcular la máxima aceleración por condiciones de adherencia, vamos a resolver el sistema de fuerzas que se plantea en la figura siguiente : Esquema de las fuerzas que actúan. donde : N1 = reacción normal en las ruedas del eje delantero N2 = reacción normal en las ruedas del eje trasero F1 = esfuerzo tractor en las ruedas del eje delantero F2 = esfuerzo tractor en las ruedas del eje trasero R1 = resistencia a la rodadura en las ruedas del eje delantero R2 = resistencia a la rodadura en las ruedas del eje trasero

40
- Caso de tracción a las cuatro ruedas.
Haciendo sumatorio de fuerzas en el eje de desplazamiento (x) y en el eje perpendicular (y), se obtiene el siguiente sistema de ecuaciones : P = N1 + N2 (4.55) m · g = F1 + F2 - R1 - R2 (4.56) Como además se cumple que : F1 = N1 · ma (4.57) F2 = N2 · ma (4.58) R1 = N1 · m (4.59) R2 = N2 · m (4.60) Se obtiene la siguiente ecuación : (N1 + N2) · ma - (N1 + N2) · m = m · g (4.61) y sustituyendo la ecuación del peso del vehículo queda : P · ma - P · m = g · m (4.62) m · g · ma - m · g · m = g · m (4.63) g = g · (ma - m) (4.64)
 y en el eje perpendicular (y), se obtiene el siguiente sistema de ecuaciones : P = N1 + N2 (4.55) m · g = F1 + F2 - R1 - R2 (4.56) Como además se cumple que : F1 = N1 · ma (4.57) F2 = N2 · ma (4.58) R1 = N1 · m (4.59) R2 = N2 · m (4.60) Se obtiene la siguiente ecuación : (N1 + N2) · ma - (N1 + N2) · m = m · g (4.61) y sustituyendo la ecuación del peso del vehículo queda : P · ma - P · m = g · m (4.62) m · g · ma - m · g · m = g · m (4.63) g = g · (ma - m) (4.64)")
41
- Caso de tracción delantera.
En este caso: (4.65) (4.66) Fmax = N1 · ma (4.67) donde m se ha calculado por la fórmula de la S.A.E. El tiempo que le cuesta al vehículo ponerse a una determinada velocidad v : (4.68) Sin embargo este tiempo no es real, ya que esa aceleración no es mantenible durante un periodo de tiempo, sino sólo en el inicio para v = 0 Km/h. El diseño ha de ser tal que si la aceleración aquí calculada es mayor que la máxima capacidad de aceleración obtenida en los cálculos de las prestaciones, el vehículo no patinará. La fuerza máxima de aceleración será entonces : Fmax = m · g (4.69)
 (4.66) Fmax = N1 · ma (4.67) donde m se ha calculado por la fórmula de la S.A.E. El tiempo que le cuesta al vehículo ponerse a una determinada velocidad v : (4.68) Sin embargo este tiempo no es real, ya que esa aceleración no es mantenible durante un periodo de tiempo, sino sólo en el inicio para v = 0 Km/h. El diseño ha de ser tal que si la aceleración aquí calculada es mayor que la máxima capacidad de aceleración obtenida en los cálculos de las prestaciones, el vehículo no patinará. La fuerza máxima de aceleración será entonces : Fmax = m · g (4.69)")
42
4.6.2 ESTUDIO DE LA PENDIENTE MÁXIMA SUPERABLE
Al igual que en el caso anterior se va a despreciar en este caso la resistencia aerodinámica. Se resuelve el sistema de fuerzas planteado en la figura siguiente : Se calcula la resistencia total del vehículo y la fuerza motriz total como : RT = R1 + R2 + P · sena (4.70) FT = F1 + F2 (4.71) Como estamos en el cálculo de la pendiente máxima y la velocidad va a ser muy pequeña, se hace la suposición de una aceleración despreciable (F = g · m (con m · g = 0 para pendiente máxima)), es decir estamos en el supuesto de tracción total, luego RT = FT.
 FT = F1 + F2 (4.71) Como estamos en el cálculo de la pendiente máxima y la velocidad va a ser muy pequeña, se hace la suposición de una aceleración despreciable (F = g · m (con m · g = 0 para pendiente máxima)), es decir estamos en el supuesto de tracción total, luego RT = FT.")
43
Resolviendo las ecuaciones anteriores :
F1 + F2 = R1 + R2 + P · sena (4.72) Como : F1 + F2 = P · ma (4.73) R1 + R2 = P cosa · m (4.74) Entonces : P · ma = P cosa · m + P · sena (4.75) ma = m cosa + sena (4.76) Sabiendo: y sustituyendo en la ecuación anterior se obtiene : cos4a [(1 - m2)2 + 4 m2] + cos2a [2(1 - m2) (ma2 - 1) - 4 m2] + (ma2 - 1)2 = 0 (4.77) Resolviendo esta ecuación, con ma obtenido del tipo de firme y m de la fórmula de SAE, se obtiene el valor de a. Entonces el valor de la máxima pendiente expresada en % será : nmax = 100 · sena (4.78)
 Como : F1 + F2 = P · ma (4.73) R1 + R2 = P cosa · m (4.74) Entonces : P · ma = P cosa · m + P · sena (4.75) ma = m cosa + sena (4.76) Sabiendo: y sustituyendo en la ecuación anterior se obtiene : cos4a [(1 - m2)2 + 4 m2] + cos2a [2(1 - m2) (ma2 - 1) - 4 m2] + (ma2 - 1)2 = 0 (4.77) Resolviendo esta ecuación, con ma obtenido del tipo de firme y m de la fórmula de SAE, se obtiene el valor de a. Entonces el valor de la máxima pendiente expresada en % será : nmax = 100 · sena (4.78)")
44
4.6.3 ESTUDIO DE LA VELOCIDAD MÁXIMA EN CURVA
Para calcular la máxima velocidad en curva se compone la fuerza centrífuga con la resistencia total al avance, para después igualarla a la fuerza de adherencia. Se realiza la suposición de que la pendiente es nula. Según el esquema de la figura siguiente : (4.79) donde : Fc = fuerza centrífuga RT = resistencia total al avance Fad = fuerza de adherencia
 donde : Fc = fuerza centrífuga. RT = resistencia total al avance. Fad = fuerza de adherencia.")
45
Sabiendo que : RT = Rr + Ra + Rp (4.80) Rr = P · m = (4.81) Ra = (4.82) Rp = 0 (en este caso) (4.83) Fad = P · ma (4.84) donde : r = radio de la curva (m) v = velocidad en m/s Como es tracción total es independiente que sea en un eje o en otro. Sustituyendo los valores : (4.85) De donde se obtiene la velocidad v. Tomando m como constante la ecuación se simplifica bastante.
 Fad = P · ma (4.84) donde : r = radio de la curva (m) v = velocidad en m/s. Como es tracción total es independiente que sea en un eje o en otro. Sustituyendo los valores : (4.85) De donde se obtiene la velocidad v. Tomando m como constante la ecuación se simplifica bastante.")
46
4.6.4 COMPROBACIÓN DE VUELCO EN CURVA
Para comprobar la posibilidad de vuelco en una curva se realizará como en los casos anteriores la resolución del sistema de fuerzas aplicado en el vehículo en una curva. Según la figura: Vías delantera y trasera Esquema de las fuerzas que actúan. donde : q = ángulo de inclinación del vehículo Ld = vía delantera Lt = vía trasera Fd = fuerza realizada por el sistema de amortiguación delantero Ft = fuerza realizada por el sistema de amortiguación trasero

47
además definiremos : td = vía delantera / 2 = Ld / 2 (4.86) tt = vía trasera / 2 = Lt / 2 (4.87) Tomando momentos respecto de O tendremos : Ft · tt + Fd · td + Ft · tt + Fd · td = Fc · hcdg (4.88) 2 · Ft · tt + 2 · Fd · td = Fc · hcdg (4.89) Ft y Fd representan la fuerza ejercida por el sistema de amortiguación de cada una de las suspensiones trasera y delantera, son por tanto proporcionales al desplazamiento y las podremos expresar como : Ft = tt · q · kt (4.90) Fd = td · q · kd (4.91) donde : kt = rigidez de la suspensión trasera kd = rigidez de la suspensión delantera Estableciendo la condición de vuelco (un par de ruedas se separen del suelo) : Ft · tt + Fd · td = Fc · hcdg (4.92) y sustituyendo queda : tt2 · q · kt + td2 · q · kd = m · v2/r · hcdg (4.93)
 2 · Ft · tt + 2 · Fd · td = Fc · hcdg (4.89) Ft y Fd representan la fuerza ejercida por el sistema de amortiguación de cada una de las suspensiones trasera y delantera, son por tanto proporcionales al desplazamiento y las podremos expresar como : Ft = tt · q · kt (4.90) Fd = td · q · kd (4.91) donde : kt = rigidez de la suspensión trasera. kd = rigidez de la suspensión delantera. Estableciendo la condición de vuelco (un par de ruedas se separen del suelo) : Ft · tt + Fd · td = Fc · hcdg (4.92) y sustituyendo queda : tt2 · q · kt + td2 · q · kd = m · v2/r · hcdg (4.93)")
48
de donde podemos despejar el ángulo de inclinación del vehículo q :
(4.94) Estableciendo ahora el equilibrio de fuerzas : Fd + Ft = P = m · g (4.95) q · [tt · kt + td · kd] = m · g (4.96) Entonces : (4.97) que sustituyendo en la ecuación que se había obtenido para el ángulo q, permitirá obtener la velocidad en la que se produce el vuelco. (4.98)
 Estableciendo ahora el equilibrio de fuerzas : Fd + Ft = P = m · g (4.95) q · [tt · kt + td · kd] = m · g (4.96) Entonces : (4.97) que sustituyendo en la ecuación que se había obtenido para el ángulo q, permitirá obtener la velocidad en la que se produce el vuelco. (4.98)")
49
4.7 DIMENSIONAMIENTO ENERGÉTICO DEL AUTOMÓVIL ELÉCTRICO
Sea un vehículo de unas dimensiones determinadas, cuyas características principales son : Peso: P (Kg) Velocidad: v (m/s) Superficie frontal: S (m2) Coeficiente aerodinámica: Cx Pendiente superable: n (%) Coeficiente rodadura: m Rendimiento de la transmisión: hT 1. En primer lugar se realiza el cálculo de la resistencia total al avance (RT), que es la suma de las resistencias a la rodadura (Rr), aerodinámica (Ra) y a superación de pendientes (Rp). RT = Rr + Ra + Rp (4.99) Rr = m · P (4.100) Ra = 1/16 · Cx · S · v2 (4.101) Rp = P · n / 100 (4.102)
 Velocidad: v (m/s) Superficie frontal: S (m2) Coeficiente aerodinámica: Cx. Pendiente superable: n (%) Coeficiente rodadura: m. Rendimiento de la transmisión: hT. 1. En primer lugar se realiza el cálculo de la resistencia total al avance (RT), que es la suma de las resistencias a la rodadura (Rr), aerodinámica (Ra) y a superación de pendientes (Rp). RT = Rr + Ra + Rp (4.99) Rr = m · P (4.100) Ra = 1/16 · Cx · S · v2 (4.101) Rp = P · n / 100 (4.102)")
50
2. Una vez calculada la resistencia total al avance se puede calcular la potencia necesaria para el avance del vehículo a una determinada velocidad v: (4.103) 3. Para el dimensionamiento de la potencia eléctrica en bornes del motor (Pb), es necesario tener en cuenta que el motor eléctrico ha de ser capaz de ceder toda la potencia necesaria para el avance del vehículo. Esta potencia consumida se calcula aplicando el rendimiento eléctrico (hE) del motor a la potencia. = f(P) (4.104) 4. Una vez conocida la potencia que debemos tener en bornes del motor es posible determinar la energía cedida por las baterías (Ebt), sin mas que tener en cuenta el tiempo que es usada esa potencia. Ebt = Pb · t = f(P,t) (4.105)
 3. Para el dimensionamiento de la potencia eléctrica en bornes del motor (Pb), es necesario tener en cuenta que el motor eléctrico ha de ser capaz de ceder toda la potencia necesaria para el avance del vehículo. Esta potencia consumida se calcula aplicando el rendimiento eléctrico (hE) del motor a la potencia. = f(P) (4.104) 4. Una vez conocida la potencia que debemos tener en bornes del motor es posible determinar la energía cedida por las baterías (Ebt), sin mas que tener en cuenta el tiempo que es usada esa potencia. Ebt = Pb · t = f(P,t) (4.105)")
51
5. La autonomía del vehículo (A) a una velocidad dada se puede calcular en función del tiempo de utilización de la potencia del motor (t) como: (4.106) Con lo que la expresión de la energía cedida por las baterías se puede expresar: = f(P,A) (4.107) 6. Estudiando el funcionamiento de la propia batería se ha de considerar otros rendimientos que provienen del proceso de carga (hc) y descarga (hd) de la batería. Si se añaden estos rendimientos al cálculo que habíamos realizado de la energía cedida por la batería obtendremos la energía que debe poseer nuestra batería (Ebt0): = f(P,A) (4.108)
 Con lo que la expresión de la energía cedida por las baterías se puede expresar: = f(P,A) (4.107) 6. Estudiando el funcionamiento de la propia batería se ha de considerar otros rendimientos que provienen del proceso de carga (hc) y descarga (hd) de la batería. Si se añaden estos rendimientos al cálculo que habíamos realizado de la energía cedida por la batería obtendremos la energía que debe poseer nuestra batería (Ebt0): = f(P,A) (4.108)")
52
7. Conocido el valor de la energía que es necesaria para el accionamiento del vehículo, se calcula el peso de dicha batería (Pbt), teniendo en cuenta el valor de la densidad de energía de la batería (dE), cuyo valor va a depender del tipo de par electrolítico que estemos utilizando. = f(P,A) (4.109) 8. Con objeto de tener en cuenta que se pudiera producir una descarga profunda de la batería si se llevara al límite el valor de la autonomía del vehículo, se realiza un sobredimensionamiento de la batería (hdp) para que de esta manera, el valor de la energía capaz de utilizar nuestro vehículo sea entre un 80% y un 90% de la energía que posee la propia batería. Así queda: = f(P,A) (4.110) 9. Se puede definir ahora el concepto de autonomía específica (Ae), que es la expresión de la autonomía del vehículo en función sólo del peso del vehículo. Es decir, son los kilómetros recorridos por kilogramo de batería. Se puede expresar como: = f(P) (4.111)
 (4.109) 8. Con objeto de tener en cuenta que se pudiera producir una descarga profunda de la batería si se llevara al límite el valor de la autonomía del vehículo, se realiza un sobredimensionamiento de la batería (hdp) para que de esta manera, el valor de la energía capaz de utilizar nuestro vehículo sea entre un 80% y un 90% de la energía que posee la propia batería. Así queda: = f(P,A) (4.110) 9. Se puede definir ahora el concepto de autonomía específica (Ae), que es la expresión de la autonomía del vehículo en función sólo del peso del vehículo. Es decir, son los kilómetros recorridos por kilogramo de batería. Se puede expresar como: = f(P) (4.111)")
53
10. Para evaluar la autonomía del vehículo (A), y conociendo el peso del vehículo sin baterías se pueden realizar las gráficas siguientes: * Autonomía específica (Km/Kg) * Autonomía específica (Km/Kg) vs. Peso del vehículo (Kg) vs. Peso de las baterías (Kg) * Autonomía (Km) * Autonomía (Km) vs. Peso de las baterías (Kg) vs. Peso total del vehículo (Kg)
 * Autonomía específica (Km/Kg) vs. Peso del vehículo (Kg) vs. Peso de las baterías (Kg) * Autonomía (Km) * Autonomía (Km) vs. Peso de las baterías (Kg) vs. Peso total del vehículo (Kg)")
54
4.8 ESTUDIO DE CICLOS DE FUNCIONAMIENTO
Para estudiar el comportamiento de los vehículos en diferentes situaciones, se han realizado distintos tipos de ciclos de funcionamiento que pretenden simular el comportamiento real del vehículo. Así tenemos los ciclos urbanos, en donde se incluyen las aceleraciones, arranques, frenadas y paradas con una mayor frecuencia así como una velocidad irregular, frente a los ciclos de carretera con una conducción mucho mas regular y con un número muchísimo menor de arranques y frenadas. Los ciclos de funcionamiento dan condiciones medias de circulación en circuito urbano o suburbano.

55
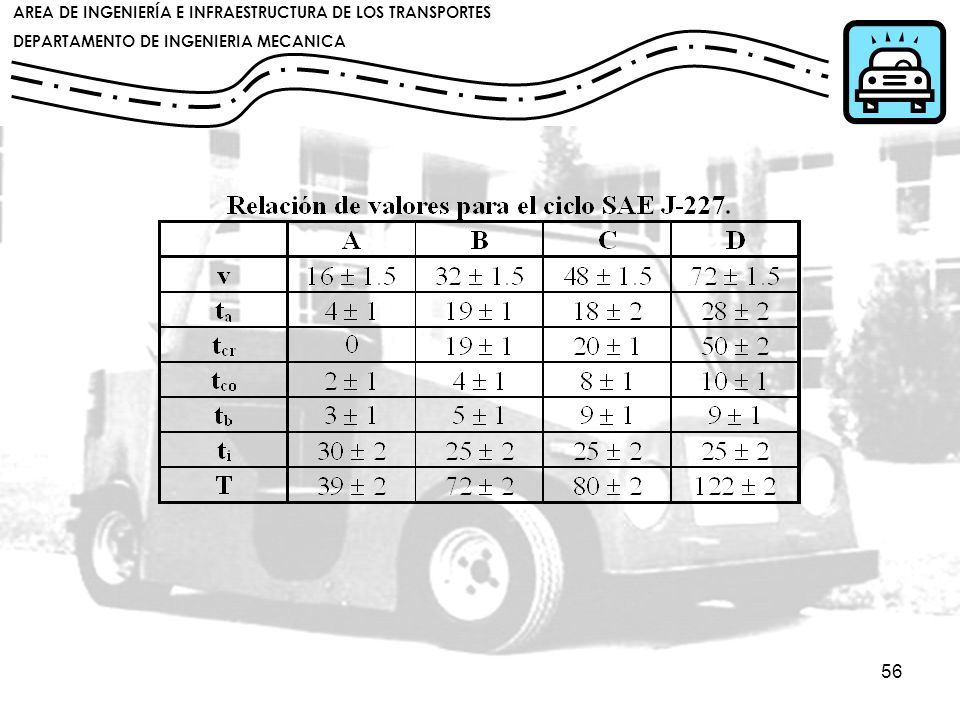
4.8.1 EL CICLO SAE J-227 Consta de los siguientes periodos : 1º aceleración, 2º velocidad constante, 3º deceleración, 4º frenada, 5º reposo. En la figura se observa los diferentes periodos del ciclo, donde la velocidad viene expresada en Km/h y el tiempo de duración de cada parte del ciclo en segundos.

57
4.8.2 EL CICLO ECE - 15 Consta de los siguientes periodos; una parte urbana que se repite 4 veces y una parte suburbana. La longitud del ciclo es de 1180 segundos, 195 para cada parte urbana y 400 segundos para la parte suburbana.

58
Ejemplo 3. Dado un vehículo de 650 Kg de peso y 1350 mm de altura y 1481 mm de anchura, que posee un coeficiente de penetración aerodinámica de 0.38, un coeficiente de resistencia a la rodadura de y una autonomía en ciclo urbano de 30 Km (los rendimientos de la transmisión y del motor eléctrico son del 85 y 87 % respectivamente). Estudiar el peso total de sus baterías si el ciclo que sigue es el que se muestra en la figura siguiente y se sabe que no posee freno regenerativo y que la densidad de energía de la batería que utiliza es de 30 wh/Kg. Aceleración: de 0 a 47 Km/h 16 s Crucero: Km/h 16 s Frenada: de 47 a 0 Km/h 7 s Parada: Km/h 25 s tiempo de ciclo 64 s longitud de ciclo 400 m

59
P = 650 Kg ; hT = 85 % ; m = 0.018 ; hE = 87 % ; Cx = 0.38 ; A = 30 Km
S = 0.8 · a · b = 0.8 · 1.35 · = 1.6 m2 (4.112) Al ser un ciclo urbano, habrá que ver cuantas veces se puede repetir con la autonomía que se da de dato en el problema, sabiendo que durante cada ciclo se recorre una distancia de 400 metros: (4.113) * Cálculo de la resistencia total al avance. RT = Rr + Ra + Rp (4.114) (como no dan datos, suponemos Rp = 0) RT = P · m + 1/16 · Cx · S · v2 = (4.115) = 650 · · 0.38 · 1.6 · (13.05)2 = = = Kg
 Al ser un ciclo urbano, habrá que ver cuantas veces se puede repetir con la autonomía que se da de dato en el problema, sabiendo que durante cada ciclo se recorre una distancia de 400 metros: (4.113) * Cálculo de la resistencia total al avance. RT = Rr + Ra + Rp (4.114) (como no dan datos, suponemos Rp = 0) RT = P · m + 1/16 · Cx · S · v2 = (4.115) = 650 · · 0.38 · 1.6 · (13.05)2 = = = Kg.")
60
* Cálculo de potencia en bornes del motor al circular a la velocidad de 47 Km/h.
(4.116) * Cálculo de las energías del ciclo completo. Eaceleración = Pb · tmedio = · 16/2 = ws (4.117) Ecrucero = Pb · t = · 16 = ws (4.118) Eciclo = Eaceleración + Ecrucero + Efrenada + Eparada = (4.119) = = ws ETotal = 75 · Eciclo = 75 · = ws (4.120) ETotal = wh (4.121)
 * Cálculo de las energías del ciclo completo. Eaceleración = Pb · tmedio = · 16/2 = ws (4.117) Ecrucero = Pb · t = · 16 = ws (4.118) Eciclo = Eaceleración + Ecrucero + Efrenada + Eparada = (4.119) = = ws. ETotal = 75 · Eciclo = 75 · = ws (4.120) ETotal = wh (4.121)")
61
Cálculo del peso de la batería.
Densidad de energía de la batería para una descarga en 5 horas: dE = 30 wh/Kg (4.122) Tiempo de descarga de la batería del vehículo con el ciclo dado: tdescarga = tciclo · nº ciclos = 64 · 75 = 4800 s = 80 min = 1h 20’ (4.123) Para esa batería, su capacidad en descarga de 1h 20’ corresponderá a un 70% de la capacidad de descarga en 5 horas. (4.124) Para prevenir una descarga profunda de la batería, esta se sobredimensiona con un factor que en este caso tomamos de hdp = 90%. = / 0.9 = Kg (4.125) El cálculo de la capacidad de la batería se realiza teniendo en cuenta la tensión de trabajo del motor. Suponiendo un motor de a una tensión V = 24 Voltios, la capacidad necesaria de la batería será: CAh = ETotal / V = wh / 24 v = Ah (4.126)
 Tiempo de descarga de la batería del vehículo con el ciclo dado: tdescarga = tciclo · nº ciclos = 64 · 75 = 4800 s = 80 min = 1h 20’ (4.123) Para esa batería, su capacidad en descarga de 1h 20’ corresponderá a un 70% de la capacidad de descarga en 5 horas. (4.124) Para prevenir una descarga profunda de la batería, esta se sobredimensiona con un factor que en este caso tomamos de hdp = 90%. = / 0.9 = Kg (4.125) El cálculo de la capacidad de la batería se realiza teniendo en cuenta la tensión de trabajo del motor. Suponiendo un motor de a una tensión V = 24 Voltios, la capacidad necesaria de la batería será: CAh = ETotal / V = wh / 24 v = Ah (4.126)")
62
Ejemplo 4. El vehículo anterior, se somete a ciclo de carretera, donde después de adquirir la velocidad de crucero de 60 Km/h, permanece en ella durante 90 Km. Estudiar el peso total de sus baterías si se sabe que no posee freno regenerativo y que la densidad de energía de la batería es de 30 wh/Kg. Ciclo de carretera Arranque Inicial Aceleración: 0 a 30 Km/h 6.4 s Pw = 27.2 Kw (rampa) Aceleración: 30 a 60 Km/h 6 s Pw = 27.2 Kw (rectangular) Crucero: 60 Km/h tcr s tiempo de ciclo: ( tcr) s longitud de ciclo: m
 Aceleración: 30 a 60 Km/h 6 s Pw = 27.2 Kw (rectangular) Crucero: 60 Km/h tcr s. tiempo de ciclo: ( tcr) s. longitud de ciclo: m.")
63
P = 650 Kg ; hT = 85 % ; m = 0.018 ; hE = 87 % ; Cx = 0.38 ; A = 90 Km
S = 0.8 · a · b = 0.8 · 1.35 · = 1.6 m2 (4.127) Según los datos del enunciado, el vehículo arranca, alcanza la velocidad de 60 Km/h y permanece en ella hasta el final del trayecto (90 Km), por lo que no habrá que repetir el ciclo. Sin embargo si que hay que calcular el tiempo que dura la parte de crucero. A = v · tcr tcr = A / v = 90/60 = 1.5 horas (4.128) * Cálculo de la resistencia total al avance. RT = Rr + Ra + Rp (4.129) (como no dan datos, suponemos Rp = 0) RT = P · m + 1/16 · Cx · S · v2 = (4.130) = 650 · · 0.38 · 1.6 · (16.66)2 = = = Kg
 Según los datos del enunciado, el vehículo arranca, alcanza la velocidad de 60 Km/h y permanece en ella hasta el final del trayecto (90 Km), por lo que no habrá que repetir el ciclo. Sin embargo si que hay que calcular el tiempo que dura la parte de crucero. A = v · tcr tcr = A / v = 90/60 = 1.5 horas (4.128) * Cálculo de la resistencia total al avance. RT = Rr + Ra + Rp (4.129) (como no dan datos, suponemos Rp = 0) RT = P · m + 1/16 · Cx · S · v2 = (4.130) = 650 · · 0.38 · 1.6 · (16.66)2 = = = Kg.")
64
* Cálculo de la potencia en bornes del motor a la velocidad de 60 Km/h.
(4.131) * Cálculo de las energías del ciclo completo. Eaceleración de 0 a 30 Km/h = ½ · P1 · t1 = 0.5 · · 6.4 = ws (4.132) Eaceleración de 30 a 60 Km/h = P1 · (t2 - t1) = · ( ) = = ws (4.133) Eaceleración de 0 a 60 Km/h = = ws (4.134) Como hay que tener en cuenta el rendimiento del motor eléctrico: Eaceleración = Eaceleración de 0 a 60 Km/h / hE = /0.87 = = ws = wh (4.135) Ecrucero = Pb · tcr = · 1.5 = wh (4.136) ETotal = Eciclo = Eaceleración + Ecrucero = = wh (4.137)
 * Cálculo de las energías del ciclo completo. Eaceleración de 0 a 30 Km/h = ½ · P1 · t1 = 0.5 · · 6.4 = ws (4.132) Eaceleración de 30 a 60 Km/h = P1 · (t2 - t1) = · ( ) = = ws (4.133) Eaceleración de 0 a 60 Km/h = = ws (4.134) Como hay que tener en cuenta el rendimiento del motor eléctrico: Eaceleración = Eaceleración de 0 a 60 Km/h / hE = /0.87 = = ws = wh (4.135) Ecrucero = Pb · tcr = · 1.5 = wh (4.136) ETotal = Eciclo = Eaceleración + Ecrucero = = wh (4.137)")
65
* Cálculo del peso de la batería.
Densidad de energía de la batería para una descarga en 5 horas: dE = 30 wh/Kg (4.138) Tiempo de descarga de la batería del vehículo con el ciclo dado: tdescarga = 1h 30’ (4.139) Para esa batería, su capacidad en descarga de 1h 30’ corresponderá a un 78% de la capacidad de descarga en 5 horas. (4.140) Para prevenir descarga profunda de la batería, se sobredimensiona con un factor de hdp = 90%. = / 0.9 = Kg (4.141) El cálculo de la capacidad de la batería se realiza teniendo en cuenta la tensión de trabajo del motor. Si suponemos un motor trabajando a una tensión V = 24 Voltios, la capacidad de la batería será: CAh = ETotal / V = wh / 24 v = Ah (4.142)
 Tiempo de descarga de la batería del vehículo con el ciclo dado: tdescarga = 1h 30’ (4.139) Para esa batería, su capacidad en descarga de 1h 30’ corresponderá a un 78% de la capacidad de descarga en 5 horas. (4.140) Para prevenir descarga profunda de la batería, se sobredimensiona con un factor de hdp = 90%. = / 0.9 = Kg (4.141) El cálculo de la capacidad de la batería se realiza teniendo en cuenta la tensión de trabajo del motor. Si suponemos un motor trabajando a una tensión V = 24 Voltios, la capacidad de la batería será: CAh = ETotal / V = wh / 24 v = Ah (4.142)")
Presentaciones similares