Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Visually guided movements: learning with modular neural maps in robotics Jean-Luc Buessler, Jean Philippe Urban Neural Networks 11(1998)1395-1415
")
2
Indice Introduction Modular neural approaches Visual servoing Results

3
Introducción ANN para control adaptativo –Robusto a cambios en el sistema y en el entorno Modularidad: implementación de tareas complementarias y solapadas –El entrenamiento de redes modulares no es trivial

4
Introduccion Proposición La arquitectura de la red neuronal modular puede diseñarse para favorecer el aprendizaje La arquitectura bidireccional se basa en el principio de interconexión recíproca Un módulo produce la transformacion hacia delante y hacia atrás de los datos.

5
Introducción Aplicación: visual servoing de un brazo robotizado. Los módulos neuronales sirven para transformar la información visual en comandos de control motor El entrenamiento es completamente on-line y simultaneo

6
Introducción Hay una considerable reducción de la complejidad La representación interna tiene significación física

7
Modular approach Necesidad de módulos Descomposición en tareas (Brooks) y en niveles jerárquicos Simplicidad Robusted Flexibilidad
 y en niveles jerárquicos Simplicidad Robusted Flexibilidad")
8
Modular approach Un módulo está definido por sus flujos de datos Los datos que van de un módulo a otro constituyen una representación interna Ningún módulo recibe toda la información

9
Aproximaciones neuro-control Widrow: estima la planta, la planta inversa y el controlador Multiples representaciones: mas adecuada para el control del movimiento

10
Modular neural systems Clases de estructuras –Procesos sucesivos o composición funcional –Combinaciones de decisiones –Partición del espacio input

11
Modular neural systems Global adaptation La información para el entrenamiento es global Corresponde a los flujos de datos en el sistema Técnicas globales basadas en la minimización del error global Técnicas locales en función de las especificaciones locales de los módulos

12
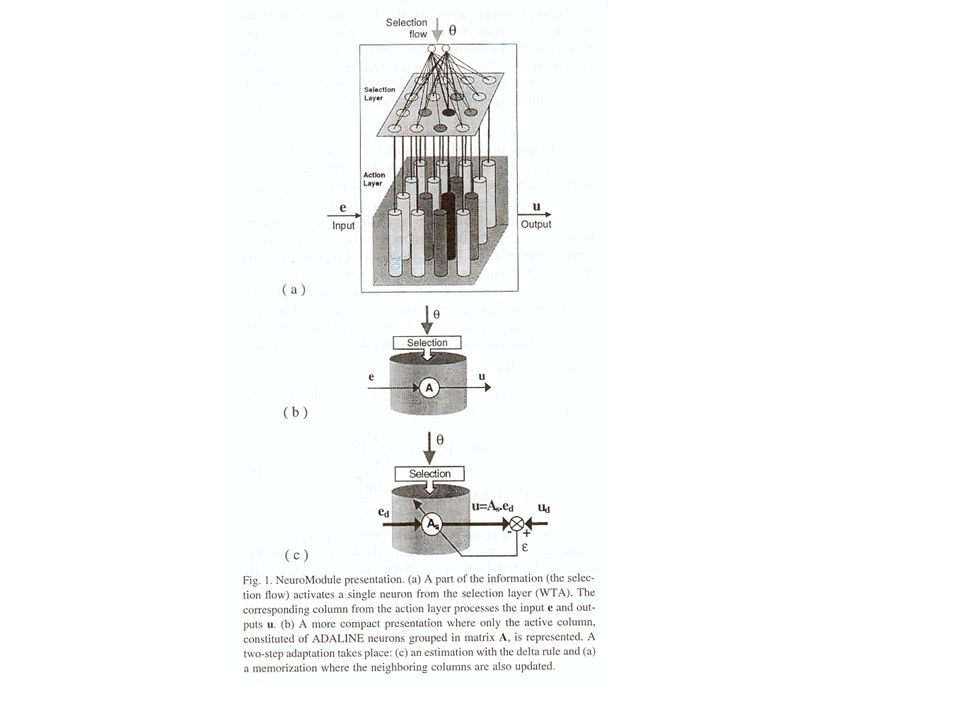
Modular neuro-systems Neuromodule –Muestra una distinción en los datos Parte de los datos sensoriales (el flujo de selección) se usa para seleccionar un estado discreto que corresponde con la activación de un conjunto de neuronas Los datos input propiamente dichos
 se usa para seleccionar un estado discreto que corresponde con la activación de un conjunto de neuronas Los datos input propiamente dichos")
13
modular Algoritmos –La capa de selección esta basada en SOM –La capa de acción esta basada en la ADALINA –Velocidad de aprendizaje constante –Adaptación localizada a la columna seleccionada

15
Neuromodule Respuesta: selección competitiva Euclídea y respuesta lineal Auto-adaptación: mediante la regla del minimo cuadrado normalizado Memorización: mediante SOM se entrena la capa selectiva

16
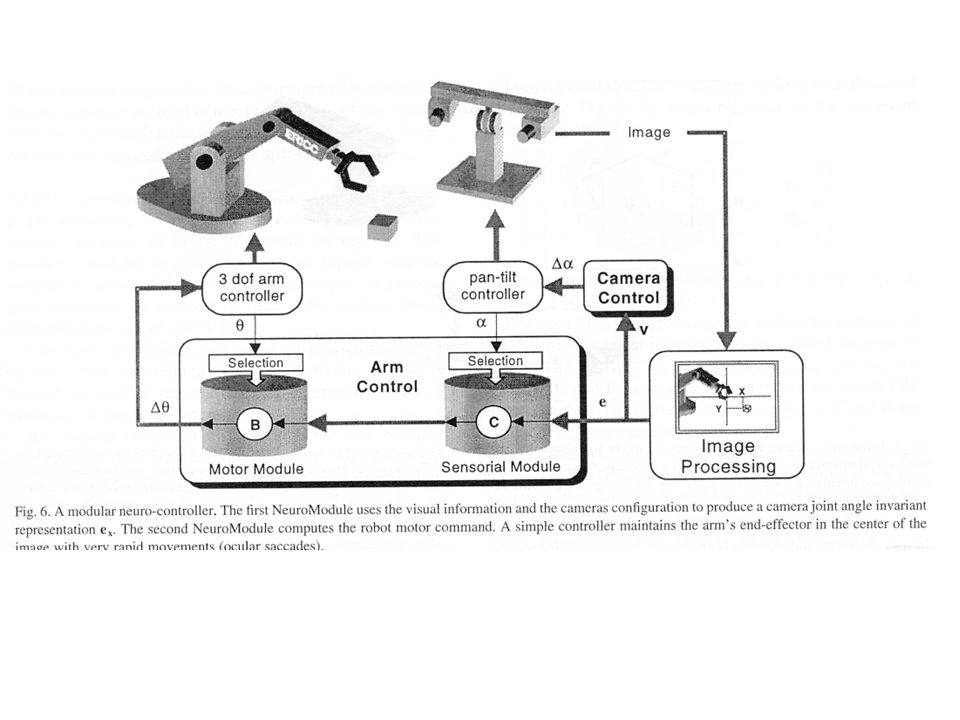
Modular Neuromodulos en serie –Aprendizaje local de cada neuromodulo basado en datos globales –Ejemplo: guiado de un brazo basado en información visual Un modulo procesa la información visual Un módulo calcula los comandos motores

18
Aprendizaje sistema modular Aprendizaje bidireccional –Cada columna tiene dos matrices de actuador –Los flujos directo e inverso intermedios e tienen que ser el mismo: el error a minimizar es la diferencia entre los flujos de datos inter- modulo –El aprendizaje local se define como minimización del error cuadrático

20
aprendizaje Normalización:el algoritmo estima los pesos hasta un factor de escala. Los pesos crecen o decrecen sin límite La regla de adaptación fuerza que la adaptación de los pesos tenga media cero

21
Visual servoing Se realiza cuando la visión artificial proporciona un lazo cerrado de control de posición a un efector robótico El error se define como la distancia en coordenadas imagen entre el efector y el objeto/posición objetivo

23
Adaptive visual servoing Se basa en La definición de las caracteristicas visuales (Coordenadas objetivo) El error considerado es la diferencia entre la posición visual del efector y el objetivo Conocemos una transformación entre la configuración física del efector y la posición visual El servo se basa en la aproximación diferencial que calcula variaciones en el espacio de configuración en lugar de calcular directamente la posición final
 El error considerado es la diferencia entre la posición visual del efector y el objetivo Conocemos una transformación entre la configuración física del efector y la posición visual El servo se basa en la aproximación diferencial que calcula variaciones en el espacio de configuración en lugar de calcular directamente la posición final")
24
Visual servoing Realimentación de aprendizaje –Se basa en la aplicación de la inversa del Jacobiano de los parametros de configuración –Los métodos adaptativos calculan iterativamente un estimador del Jacobiano inverso –La aproximación se usa para estimar los comandos motores (variaciones en el espacio de configuración)
")
25
Visual servoing Neuromodulo: estimación del Jacobiano inverso y de los comandos de control motor Activa la columna en la capa de actuacion Determina un nuevo estimador del Jacobiano inverso Calcula la respuesta Adaptación de los pesos

27
Visual servoing Visión activa: Control de pan, tilt y zoom de las camaras Permite seguir de forma continuada al efector La matriz Jacobiana inversa se puede descomponer en dos que corresponden al contro de la cámara y al del efector Se encadenan dos neuromodulos correspondiendo a los controles de la cámara y el efector

29
Visual servoing Reaching and grasping –Dos módulos que controlan la posición espacial de la garra La orientación de la garra

33
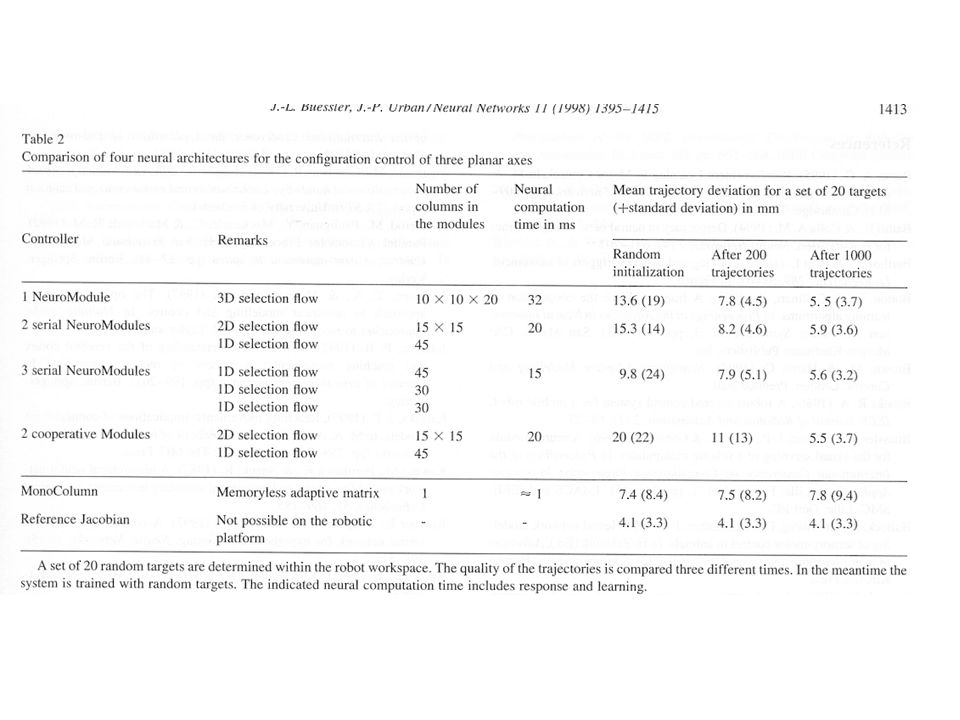
experimentos Se mide la desviación de la trayectoria respecto de la deseada, además de la posición final

35
experimentos Aprendizaje de control con cámara estatica Se presentan posiciones objetivo y la red se entrena on-line

37
experimentos Visión activa: la red sigue al efector con movimientos sacádicos de las camaras

39
experimentos Insensibilidad a las condiciones iniciales de los pesos en los módulos medida en desviación promedio de la trayectoria

41
experimentos

Presentaciones similares