Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Analizador de espectro
Rev 7 21JUN11

2
Introducción Según la teoría de Fourier, toda señal está compuesta por una serie de señales senoidales de amplitud, frecuencia y fase apropiadas Dicho conjunto de señales componentes se llama espectro. El osciloscopio nos permite visualizar señales en función del tiempo, pero NO nos da una idea clara de las componentes que forman la misma. El analizador de espectro es el instrumento que nos permite visualizar las componentes que conforman la señal de interés. Misma información presentada de manera diferente.

3
Necesidad del analizador de espectro
Rhode Schwarz Permite analizar el contenido armónico de una señal.

4
Necesidad del analizador de espectro
Obtención de información útil de señales no periódicas. Rhode Schwarz

5
Utilidad del analizador de espectro
Permite conocer cuanta energía posee una señal en una frecuencia en particular. Nos interesa conocer esta información por ejemplo en los siguientes casos: Detección de emisiones fuera de banda en transmisores, que puedan interferir con otros canales. Medición de distorsión en señales moduladas (o sin modular). Mediciones de Interferencia electromagnética (EMI) para cumplir con regulaciones vigentes. Visualización clara de las componentes de una señal: Distorsión armónica, Productos de intermodulación, señales interferentes, ruido, etc. Mediciones en microondas en general Señales moduladas en AM, FM, etc.
. Mediciones de Interferencia electromagnética (EMI) para cumplir con regulaciones vigentes. Visualización clara de las componentes de una señal: Distorsión armónica, Productos de intermodulación, señales interferentes, ruido, etc. Mediciones en microondas en general. Señales moduladas en AM, FM, etc.")
6
Características principales
Básicamente se trata de un voltímetro selectivo en frecuencia que responde al valor pico de la señal en banda (modelo analógico). Si bien la magnitud medida NO es la potencia de la señal, puede calibrarse para indicar la misma.(Pues se conocen un Vpico y ZL). Presentan una sensibilidad mucho mayor que los osciloscopios (uV vs. mV) debido a su modo de funcionamiento ( Banda angosta vs. Banda ancha) Trabajan hasta frecuencias mucho mayores que un osciloscopio (decenas de GHz) gracias a ser un instrumento de banda angosta. Gran rango dinámico: generalmente se trabaja con indicación en pantalla en dB, lo que permite visualizar simultáneamente señales de varios ordenes de cantidad diferentes. (80dB – veces) En el análisis espectral sólo se procesa la información de módulo de las componentes, mientras que los analizadores vectoriales procesan información de módulo fase. ( En los analizadores modernos esta diferencia tiende a desaparecer dada la posibilidad de los conversores de muestrear la señal en las etapas cercanas a la entrada, antes de pasar por el filtro de FI, lo que no era posible en los analizadores antiguos.)
. Si bien la magnitud medida NO es la potencia de la señal, puede calibrarse para indicar la misma.(Pues se conocen un Vpico y ZL). Presentan una sensibilidad mucho mayor que los osciloscopios (uV vs. mV) debido a su modo de funcionamiento ( Banda angosta vs. Banda ancha) Trabajan hasta frecuencias mucho mayores que un osciloscopio (decenas de GHz) gracias a ser un instrumento de banda angosta. Gran rango dinámico: generalmente se trabaja con indicación en pantalla en dB, lo que permite visualizar simultáneamente señales de varios ordenes de cantidad diferentes. (80dB – veces) En el análisis espectral sólo se procesa la información de módulo de las componentes, mientras que los analizadores vectoriales procesan información de módulo fase. ( En los analizadores modernos esta diferencia tiende a desaparecer dada la posibilidad de los conversores de muestrear la señal en las etapas cercanas a la entrada, antes de pasar por el filtro de FI, lo que no era posible en los analizadores antiguos.)")
7
Clasificación De tiempo Real Filtros Múltiples Analizador de Fourier
De muestreo de frecuencias Con filtro sintonizable De barrido de frecuencia (heterodino) Barrido en RF Barrido en FI
 Barrido en RF. Barrido en FI.")
8
Analizador de Fourier Digitaliza la señal y luego un DSP realiza la transformada rápida de Fourier (FFT) para luego presentar el resultado en pantalla. Permite obtener información de magnitud y fase del espectro (Análisis vectorial). Permiten caracterizar fenómenos transitorios. Presentan menor sensibilidad, rango dinámico y rango de frecuencias que los de barrido.
 para luego presentar el resultado en pantalla. Permite obtener información de magnitud y fase del espectro (Análisis vectorial). Permiten caracterizar fenómenos transitorios. Presentan menor sensibilidad, rango dinámico y rango de frecuencias que los de barrido.")
9
De filtros múltiples Consta de una serie de filtros en paralelo, con frecuencias centrales y ancho de banda ajustados para cubrir todo el rango de frecuencias de entrada del instrumento. La resolución está dada por el ancho de banda de los filtros. Existe una relación de compromiso entre la resolución y la cantidad de filtros. Su aplicación está limitada a rangos de frecuencias no muy extensos pues en caso contrario la cantidad de filtros es muy elevada.

10
Filtro sintonizable Basa su funcionamiento en el filtro sintonizable, cuya frecuencia central se hace variar con una corriente de excitación. La rampa de excitación del filtro también se utiliza para el barrido del haz en el tubo. Esta estructura es más eficiente que la de filtros múltiples, pero no es de tiempo real. La señal debe estar estable en la entrada para poder analizarla correctamente. No permite análisis de transitorios. Presenta el problema de ser difícil obtener una buena planicidad en todo el rango (Q= fo / Δf).
.")
11
Analizador de espectro de barrido (Heterodino)
Para evitar los problemas de un filtro sintonizable, se utiliza el principio heterodino. En éste método se trabaja con filtros fijos en una frecuencia intermedia establecida. De esta forma pueden obtenerse filtros de ancho de banda muy estrecho y constante para todo el rango de frecuencias de entrada.

12
Mixer Es un bloque fundamental en el AE de barrido.
Se trata de un dispositivo alineal que permite obtener a su salida una combinación de las frecuencias de 2 señales colocadas en sus entradas. Cualquier dispositivo alineal sirve a este propósito, aunque cada uno presenta distinta performance y características. Para la función del mixer, es deseable que el dispositivo genere la mezcla deseada y la menor cantidad de componentes espúreas, o sea que tome la forma: Si la entrada son 2 señales de frecuencias distintas, la salida esta compuesta por las distintas combinaciones de estas 2 frecuencias como puede verse en el gráfico siguiente

13
Mixer Respuesta de un mixer cuadrático ante 2 tonos puros en su entrada (Las amplitudes de las componentes no están a escala.)
 .")
14
Mixer Existen muchas configuraciones diferentes de mixers. Cada una presenta diferentes valores de amplitud para las componentes de salida. Para el AE nos interesa solo el término de frecuencias suma y diferencia. A pesar de esto, la salida también presenta la frecuencia del OL y la de la señal de entrada fin.

15
Esta salida se hace pasar por un filtro con frecuencia central fIF .
AE de barrido - Principio de funcionamiento El principio de funcionamiento de este tipo de analizador es muy similar a un receptor de radio. La idea es trasladar las frecuencias existentes en la entrada a una frecuencia intermedia fija. Para esto la señal de entrada (fin ) ingresa a un mezclador junto con una señal generada por un oscilador local (fOL) . La salida del mezclador contiene las componentes mostradas en la figura anterior. Esta salida se hace pasar por un filtro con frecuencia central fIF . Con este esquema, se trata de hallar una fOL tal que se cumpla la ecuación de sintonía: Cuando esto sucede, existirá una señal a la salida del filtro de FI, que podrá ser medida y cuya amplitud es proporcional a la de la componente presente en la entrada. De las 2 soluciones existentes a la ecuación de sintonía, la diferencia es la deseada y la otra es la imagen, que debe eliminarse. A diferencia de un receptor de radio, se desea que el OL varíe su frecuencia desde un mínimo a un máximo, de forma tal de ir realizando una búsqueda de las frecuencias de entrada que cumplan la ecuación de sintonía y produzcan salida del filtro de FI. El OL permite ajustar el rango de frecuencias a su salida especificando la frec inicial (fstart) y la frec final (fstop) o la frecuencia central y el barrido (SPAN). Tambien se puede ajustar el tiempo del barrido (T).
 ingresa a un mezclador junto con una señal generada por un oscilador local (fOL) . La salida del mezclador contiene las componentes mostradas en la figura anterior. Esta salida se hace pasar por un filtro con frecuencia central fIF . Con este esquema, se trata de hallar una fOL tal que se cumpla la ecuación de sintonía: Cuando esto sucede, existirá una señal a la salida del filtro de FI, que podrá ser medida y cuya amplitud es proporcional a la de la componente presente en la entrada. De las 2 soluciones existentes a la ecuación de sintonía, la diferencia es la deseada y la otra es la imagen, que debe eliminarse. A diferencia de un receptor de radio, se desea que el OL varíe su frecuencia desde un mínimo a un máximo, de forma tal de ir realizando una búsqueda de las frecuencias de entrada que cumplan la ecuación de sintonía y produzcan salida del filtro de FI. El OL permite ajustar el rango de frecuencias a su salida especificando la frec inicial (fstart) y la frec final (fstop) o la frecuencia central y el barrido (SPAN). Tambien se puede ajustar el tiempo del barrido (T).")
16
Sintonía del analizador
Supongamos finMin=0 ; finMax=3GHz La fFI debe estar por encima de la finMax (ya que fin pasa directo a la salida del mixer). Por lo que tomamos fFI = 3.9GHz Tomamos la componente resta de la salida del multiplicador, fIF=fLO-fin Calculamos el rango de frecuencias que debe tomar el OL para que todas las frecuencias del rango de entrada puedan caer dentro de la FI fLOMin-finMin=fFI fLOMin=fFI+finMin fLOMin= 3.9GHz+0 = 3.9GHz fLOMax-finMax=fFI fLOMax=fFI+finMax fLOMax=3.9GHz + 3GHz fLOMax=6.9GHz El rango de frecuencias del OL será GHz – 6.9GHz
. Por lo que tomamos fFI = 3.9GHz. Tomamos la componente resta de la salida del multiplicador, fIF=fLO-fin. Calculamos el rango de frecuencias que debe tomar el OL para que todas las frecuencias del rango de entrada puedan caer dentro de la FI. fLOMin-finMin=fFI. fLOMin=fFI+finMin. fLOMin= 3.9GHz+0 = 3.9GHz. fLOMax-finMax=fFI. fLOMax=fFI+finMax. fLOMax=3.9GHz + 3GHz. fLOMax=6.9GHz. El rango de frecuencias del OL será 3.9GHz – 6.9GHz.")
17
Sintonía del analizador
Rhode Schwarz El filtro de entrada elimina la frecuencia imagen. Solo el rango de frecuencias deseado llega al mezclador.

18
Sintonía del analizador
La salida del mezclador ingresa a la etapa de FI. Esta etapa, está preparada para trabajar a una frecuencia en particular y consta principalmente de un amplificador de ganancia variable y un filtro pasabanda. (Al ser el filtro de frec. fija, se evita el problema de planicidad del analizador de filtro variable pues el Q =cte) Rango de frecuencias barridas por el OL Salida del mezclador para una entrada de 2 frecuencias fin1<fin2 Visualización en pantalla S= Span T= Tiempo de barrido B= Ancho de banda de la FI (RBW) τ= Tiempo de señal en la banda pasante.
 Rango de frecuencias barridas por el OL. Salida del mezclador para una entrada de 2 frecuencias fin1<fin2. Visualización en pantalla. S= Span T= Tiempo de barrido B= Ancho de banda de la FI (RBW) τ= Tiempo de señal en la banda pasante.")
19
Conversiones múltiples
Algunos AE tienen filtros de FI tan angostos como 1KHz, 10Hz y hasta 1Hz. Realizar este tipo de filtros con una frecuencia central de 3.9GHz es técnicamente imposible. Para salvar este problema se realizan varias conversiones de forma de bajar la FI a valores donde los filtros puedan ser realizados.

20
Conversiones múltiples
La FI necesaria para poder efectuar un buen procesamiento es aprox. 21.4MHz. Si convertimos directamente desde la 1º FI a 21.4MHz tenemos lo siguiente: fIF2= fIF1- fLO2 fIF2= fLO2 – fIM2 La imagen de la segunda conversión está muy cerca de la 1º FI. Se necesitaría un filtro muy selectivo. Esto no es conveniente técnicamente. Se agrega una conversión intermedia para que la imagen esté lejos de la 1º FI.

21
Consideraciones adicionales
La mayoría de los analizadores, como este ejemplo permiten una fLOMin igual e incluso menor que la fFI, por lo que aún sin señal de entrada, fLO ingresará a la FI y habrá respuesta a la salida. Este efecto, llamado “Local Oscillator Feedthrough” genera lo que aparenta ser una componente en bajas frecuencias y puede enmascarar señales de entrada de frecuencias bajas. Debido a esto, no todos los analizadores permiten que el rango de display incluya 0Hz. No pueden medirse señales de CC. Debe cuidarse de no colocar CC en la entrada si el AE no tiene acoplamiento AC pues pueden dañarse los diodos del mezclador. No es adecuado para caracterizar transitorios

22
Extensión del rango de entrada
Para manejar frecuencias de entrada mayores, algunos AE utilizan armónicas del OL para realizar la mezcla. Al hacer esto se cambia el valor de la FI y se incorpora un filtro preselector para eliminar problemas de frecuencia imagen.

23
Extensión del rango de entrada
El diagrama muestra un ejemplo de un AE con filtro de presintonia.

24
Información típica obtenida del AE
UTN FRBA Medidas Electrónicas II Información típica obtenida del AE

25
No es posible realizar filtros gaussianos analógicos.
UTN FRBA Medidas Electrónicas II Procesamiento de FI El procesamiento de FI se realiza en la ultima etapa de FI (21.4MHz en el ejemplo). En esta etapa se amplifica la señal y el filtro de FI define el RBW ( Resolution Band Width) El amplificador de ganancia variable permite compensar la atenuación introducida en las etapas previas y así optimizar el rango dinámico del detector (y A/D si existe). A pesar de que un filtro rectangular sería mas selectivo, se prefiere utilizar en esta etapa un filtro con respuesta Gaussiana, dado que estos filtros tienen un menor tiempo de establecimiento. No es posible realizar filtros gaussianos analógicos. Se utilizan filtros con una respuesta aproximada. La selectividad depende del nro de filtros en cascada Gralmente 4 o 5. Mayor tiempo de establecimiento conlleva a barridos más lentos A medida que aumenta la resolución se manifiesta la inestabilidad del OL, por lo que para estos casos se lo suele enganchar en fase con un oscilador de alta estabilidad.
. En esta etapa se amplifica la señal y el filtro de FI define el RBW ( Resolution Band Width) El amplificador de ganancia variable permite compensar la atenuación introducida en las etapas previas y así optimizar el rango dinámico del detector (y A/D si existe). A pesar de que un filtro rectangular sería mas selectivo, se prefiere utilizar en esta etapa un filtro con respuesta Gaussiana, dado que estos filtros tienen un menor tiempo de establecimiento. No es posible realizar filtros gaussianos analógicos. Se utilizan filtros con una respuesta aproximada. La selectividad depende del nro de filtros en cascada. Gralmente 4 o 5. Mayor tiempo de establecimiento conlleva a. barridos más lentos. A medida que aumenta la resolución se manifiesta. la inestabilidad del OL, por lo que para estos casos. se lo suele enganchar en fase con un oscilador de. alta estabilidad.")
26
Filtro FI- Resolución de frecuencias
UTN FRBA Medidas Electrónicas II Filtro FI- Resolución de frecuencias Resolución: capacidad de separar 2 frecuencias de entrada en respuestas diferentes. La capacidad de resolución esta dada por la respuesta del filtro de FI llamado Resolution BandWidth (RBW). Menor RBW permite resolver frecuencias mas próximas. La respuesta a un tono senoidal puro NO es una única línea espectral como se esperaría, sino la propia respuesta del filtro.
. Menor RBW permite resolver frecuencias mas próximas. La respuesta a un tono senoidal puro NO es una única línea espectral como se esperaría, sino la propia respuesta del filtro.")
27
Resolución La separación necesaria entre dos componentes de igual amplitud para poder distinguirlas mediante un “dip” de 3dB es RBW. A menor RBW mejor resolución RBW muy pequeños implican tiempos de barrido mas lentos, impuestos por el rise time del filtro pasabanda. Existe una relación de compromiso entre el RBW, el Span (S) y el tiempode barrido T.
 y el tiempode barrido T.")
28
Resolución La separación necesaria entre dos componentes de distinta amplitud para poder distinguirlas depende del factor de selectividad del filtro.

29
Resolución

30
Relación entre RBW, Span y tiempo de barrido

31
Relación entre RBW, Span y tiempo de barrido
Se puede demostrar (*1) que el error en amplitud de una señal sinusoidal mostrada en un analizador de espectro esta definido por: α es la sensibilidad de la respuesta. (relación entre amplitud mostrada y la amplitud ideal.) Llamamos k a: Para valores de k MENORES a 1, el error es despreciable. Para k Mayores, la sensibilidad comienza a caer y por lo tanto el error es mayor, según se muestra en la siguiente tabla: *1: Handbook of spectrum analyzer techniques, Polarad Electronics, 1955.
 que el error en amplitud de una señal sinusoidal mostrada en un analizador de espectro esta definido por: α es la sensibilidad de la respuesta. (relación entre amplitud mostrada y la amplitud ideal.) Llamamos k a: Para valores de k MENORES a 1, el error es despreciable. Para k Mayores, la sensibilidad comienza a caer y por lo tanto el error es mayor, según se muestra en la siguiente tabla: *1: Handbook of spectrum analyzer techniques, Polarad Electronics,")
32
Relación entre RBW, Span y tiempo de barrido
De la fórmula de K anterior se puede deducir que reducir el B en un factor de 10 aumenta el tiempo de barrido en un factor de 100 para mantener el mismo error. La formula anterior aplica a filtros del tipo gaussiano. En los AE modernos, esta interdependencia está contemplada y el equipo ajusta el RBW acorde al T y S seleccionados. Sin embargo existe la opción manual. Si en este caso se seleccionan valores incorrectos el equipo muestra UNCAL. Esto es útil si queremos sacrificar cierta exactitud por mayor rapidez de medición. Tiempo de barrido en función del RBW para un span de 1MHz

33
Filtros RBW digitales Para obtener los RBW más pequeños (10Hz a 30KHz por ej.), los AE modernos incorporan procesamiento digital en las últimas etapas. Con la implementación de filtros digitales, los cuales proveen una gran selectividad y menor tiempo de barrido, puede obtenerse respuesta Gaussiana y corregir el error para valores de k grandes.
, los AE modernos incorporan procesamiento digital en las últimas etapas. Con la implementación de filtros digitales, los cuales proveen una gran selectividad y menor tiempo de barrido, puede obtenerse respuesta Gaussiana y corregir el error para valores de k grandes.")
34
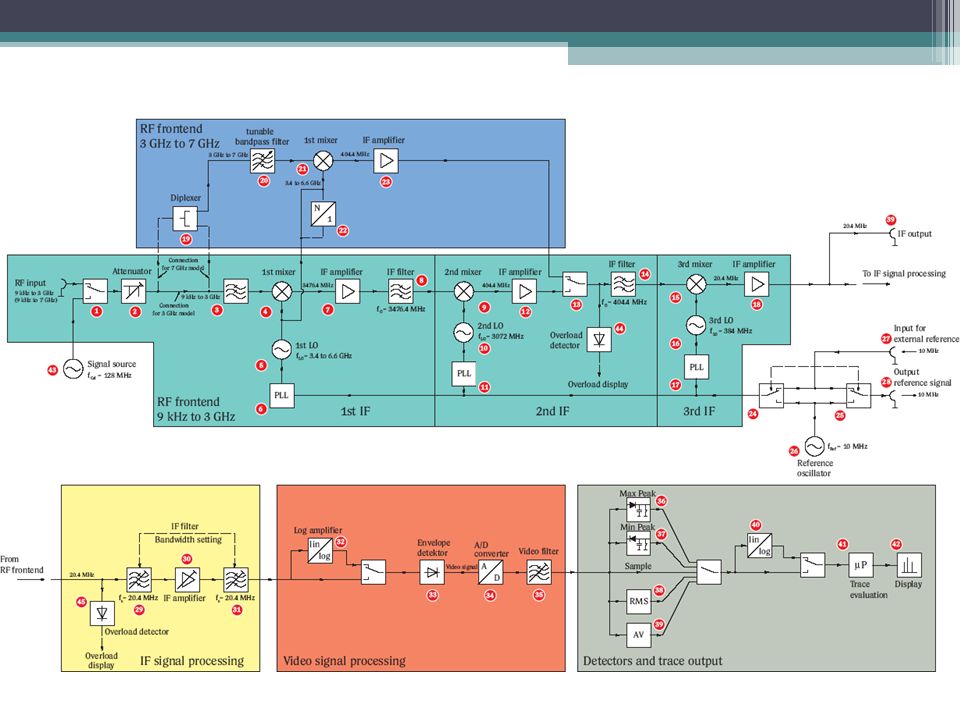
Filtros RBW digitales El siguiente diagrama muestra un AE con procesamiento digital en su última etapa de FI.

35
Filtro de Video La información buscada se encuentra en la envolvente de la señal a la salida de la última etapa de FI. Esta información se recupera como en un receptor de AM mediante un rectificador y un filtro pasa bajos (VBW). El filtro de video analógico es un pasa bajo de 1º orden. Su función es alisar la señal a mostrar.
. El filtro de video analógico es un pasa bajo. de 1º orden. Su función es alisar la señal a mostrar.")
36
Filtro de Video El ancho de banda del filtro de video (VBW) está ligado al RBW y generalmente se ajusta en forma automática. También puede ajustarse manualmente.
 está ligado al RBW y generalmente se ajusta en forma automática. También puede ajustarse manualmente.")
37
Detectores Los AE modernos usan pantallas LCD para presentar la información. La cantidad de pixels de la pantalla es limitada. Para spans muy grandes, cada pixel representa un grupo de frecuencias. Debe adoptarse un criterio sobre como mostrar la información de todo el grupo en un solo pixel. La diferencia entre detectores se manifiesta al medir señales estocásticas o con mucha variación temporal. Para tiempos de barrido cortos (SPAN chico y RBW grande) hay poca diferencia entre detectores.
![]()
38
Detectores Max peak: Representa la muestra de mayor valor dentro del grupo asignado a al pixel. No se pierden señales de entrada. Util para EMC. Min peak: Idem anterior con valores mínimos. Auto peak: Representa los valores máximo y mínimo a la vez. Sample: Toma una única muestra del grupo y la muestra. El resto se pierde. Las señales de entrada no pueden reproducirse en forma confiable. El Sweep Time no afecta el resultado. RMS: Calcula la potencia RMS del grupo de puntos asignados a un pixel y mustra dicho valor. Para que el valor calculado sea correcto VBW > 3.RBW AV: Calcula la media aritmética del grupo de muestras asignadas a un pixel y muestra este valor. El VBW no afecta su valor. Quasi peak: Se usa para mediciones de interferencia. Es un detector con tiempos de carga y descarga diferentes. Estos tiempos están definidos en la norma CISPR.
![]()
39
Generador de barrido – Oscilador de referencia
El oscilador de referencia generalmente es de 10MHz Puede constar de un TCXO o un OCXO. Para sincronizar con otros instrumentos de medición, la señal de referencia suele estar disponible en un conector externo. Generalmente puede utilizarse una referencia externa en lugar de el oscilador interno. Para este fin suele existir un conector adicional. El generador de barrido en los AE modernos es un generador sintetizado (PLL). La frecuencia no varía continuamente sino en pasos discretos. Los saltos de frecuencia dependen del RBW seleccionado. Generalmente 0.1xRBW es un valor adecuado para evitar un error excesivo.
. La frecuencia no varía continuamente sino en pasos discretos. Los saltos de frecuencia dependen del RBW seleccionado. Generalmente 0.1xRBW es un valor adecuado para evitar un error excesivo.")
40
Atenuador de RF Asegura que la señal ingrese al mezclador con la amplitud adecuada para prevenir sobrecarga y distorsión. Generalmente se ajusta automáticamente basado en el nivel de referencia, pero también se puede ajustar manualmente. El capacitor serie se utiliza para prevenir la entrada de continua. Algunos AE incluyen una señal de referencia para autocalibrarse. Esta etapa es muy importante para la sensibilidad del equipo ya que si la misma genera una relación S/N baja, no se podrá revertir la misma.

41
Nivel de referencia y atenuación
El rango de señales a medir está limitado por el ruido inherente y el máximo nivel de señal admisible. En AE modernos el rango de niveles puede ser de -147dBm a +30dBm. No es posible visualizar todo el rango simultáneamente pues se requieren ajustes distintos para cada uno. Dentro del rango total, sólo una ventana puede analizarse para un determinado ajuste. Estos ajustes se realizan definiendo el NIVEL DE REFERENCIA. Este nivel se define de forma que una señal de entrada con igual valor que el REF LEVEL genera la máxima excitación del amp logaritmico-detector ó A/D. Esto se visualiza en pantalla como una componente que alcanza el tope superior de la pantalla. El ajuste de nivel de referencia opera sobre la ATENUACION de RF y la GANANCIA de FI. Una atenuación excesiva incrementa el nivel de ruido. Una atenuación pobre genera distorsión debido a la alinealidad del mezclador. Para evitar esto, el nivel a la entrada del mixer debe estar debajo del punto de compresión de 1dB. En modo automático, el acoplamiento entre REF LEVEL, ATT y IF GAIN busca mantener constante el nivel de entrada al mixer y que una señal con nivel igual al REF LEVEL produzca la max excitación del Amp. Logarítmico – detector ó A/D.

42
Nivel de referencia y atenuación
Al seleccionar el REF LEVEL se ajustan la atenuación de rf y la ganancia de FI para mantener el nivel de señal en el amplificador log. En las figuras se ven 2 configuraciones de atenuador/ganancia. La primera combinación genera un Mix. Level excesivo y la 2da deficiente.

43
Nivel de referencia y atenuación
Efecto de atenuaciones deficientes y excesivas.

44
Nivel de referencia y atenuación
Indicación obtenible con nivel en el mixer óptimo.

45
Nivel de referencia y atenuación
Para el mismo REF. LEVEL, una atenuación excesiva reduce el rango dinámico.

46
Ruido Inherente Es el ruido generado por el movimiento aleatorio de electrones a través de las distintas etapas del equipo. Este ruido es procesado y mostrado finalmente en pantalla. La densidad espectral de este ruido puede expresarse como Pn = K.T.B.R [W/Hz] K= cte. Boltzman = J/K R=50Ohm El valor de esta potencia de ruido está en el orden de -174dBm/Hz Las etapas de entrada suman este ruido que luego es amplificado por la etapa de FI. Este nivel de ruido, que será mostrado en la pantalla, se define como Displayed Average Noise Level (DANL). El valor del DANL es quien limita la capacidad de medir señales de bajo nivel. El ruido agregado en las etapas de entrada es de bajo valor (cercano al límite de -174dBm) por lo que no aportan mucho a la potencia total de ruido. Sin embargo la atenuación de estas etapas empeora la relación señal ruido. El menor DANL se obtiene para la menor atenuación (0 dBm) y el menor ancho de banda de FI ( RBW)
. El valor del DANL es quien limita la capacidad de medir señales de bajo nivel. El ruido agregado en las etapas de entrada es de bajo valor (cercano al límite de -174dBm) por lo que no aportan mucho a la potencia total de ruido. Sin embargo la atenuación de estas etapas empeora la relación señal ruido. El menor DANL se obtiene para la menor atenuación (0 dBm) y el menor ancho de banda de FI ( RBW)")
47
DANL vs Atenuación La mínima atenuación da el DANL mas bajo.

48
DANL vs RBW RBW mas amplios dan un DANL mas alto.

49
Sensibilidad máxima De lo visto anteriormente se desprende que la sensibilidad máxima se obtiene cuando el atenuador de rf tiene un valor de 0dB ( sin que se exceda el nivel de entrada del mixer), el RBW es mínimo y el VBW es chico también. La sensibilidad límite puede definirse como el nivel de entrada que hace falta para que la indicación esté 3dB por encima del DANL en la condición anterior. Esto equivale a un nivel de señal igual al del ruido.
, el RBW es mínimo y el VBW es chico también. La sensibilidad límite puede definirse como el nivel de entrada que hace falta para que la indicación esté 3dB por encima del DANL en la condición anterior. Esto equivale a un nivel de señal igual al del ruido.")
50
Alinealidades - Overdrive
Según se vio anteriormente, la alinealidad necesaria para el funcionamiento del mixer, provoca componentes espúreas indeseadas. La cantidad y nivel de éstas depende del nivel de entrada al mixer. Aunque no se esté visualizando en pantalla, una componente que caiga dentro de el filtro de entrada puede causar overdrive del mixer.

51
Alinealidades – Tono único
Según se vio anteriormente, la alinealidad necesaria para el funcionamiento del mixer, provoca componentes espúreas indeseadas. La alinealidad es un parámetro de performance del equipo. Alinealidad a un tono único: Un incremento en la amplitud de de entrada de Δ produce un incremento de amplitud de la armónica n.fin de n Δ. El parámetro para evaluar esta característica es el punto de intersección de segunda armónica

52
Alinealidades – Tono único
El SHI es el valor del nivel de entrada teórico necesario para que el nivel de la segunda armónica sea igual al de la fundamental. Este valor nunca se alcanza pues antes se produce la compresión del mixer. Conociendo SHI se puede obtener el valor de la componente L2ndH para cualquier valor de Lin.

53
Alinealidades – 2 Tonos Si se ingresa al mixer con 2 tonos de igual amplitud, se obtienen los siguientes productos de intermodulación (considerando solo hasta la respuesta cubica)
")
54
Alinealidades – 2 Tonos En las curvas se indican las intersecciones de las componentes de 2do y 3er orden con la fundamental. La diferencia entre la curva de 2do orden de esta grafica y la anterior (SOI vs. SHI) es de 6dB (ver tabla 5.1). Los fabricantes suelen indicar una sola de las 2 especificaciones. Mientras más grande es el valor de TOI y SOI mejor es el comportamiento del equipo en cuanto a alinealidades.
 es de 6dB (ver tabla 5.1). Los fabricantes suelen indicar una sola de las 2 especificaciones. Mientras más grande es el valor de TOI y SOI mejor es el comportamiento del equipo en cuanto a alinealidades.")
55
SNR vs Nivel de entrada al mixer.
A mayor nivel de entrada, mejor relacion señal ruido. Si se baja el RBW, mejora el SNR dado que el ruido que entra en la banda es menor. En la realidad, la curva tiende a un limite inferior a causa de la compresión del mixer.

56
Máximo rango dinámico sin interferencias.

57
Ruido de fase Las inestabilidades de fase del oscilador de referencia ingresan al mezclador y se manifiestan como ruido en la salida. Este ruido aparece como una pollera alrededor de una componente espectral de entrada. Generalmente se especifica como la potencia en un ancho de banda de 1Hz , a una separación determinada de la portadora, referido a la potencia de ésta. [dBc/Hz] Para poder ver el ruido de fase generalmente se deben seleccionar RBW angostos para que no quede enmascarado. La forma del ruido esta dada por la construcción de los PLL, en especial por el ancho de banda del filtro usado en el mismo. Los AE pueden tener modos de optimización para medir cerca o lejos De una fc, o también para máxima velocidad de enganche.

58
FM residual El filtro de resolución no es lo único que limita la capacidad de separar señales. La inestabilidad del primer OL (generalmente un YTO , YIG tuned oscillator) es transferida a las siguientes etapas, impidiendo saber si la misma se debe a la señal de entrada o al OL. El efecto se manifiesta para los menores RBW llegando al punto donde limita la capacidad de separar frecuencias de entrada. Los AE antiguos tenían una FM residual del orden de 1KHz. Actualmente pueden estar en el orden de 1 a 8 Hz.
 es transferida a las siguientes etapas, impidiendo saber si la misma se debe a la señal de entrada o al OL. El efecto se manifiesta para los menores RBW llegando al punto donde limita la capacidad de separar frecuencias de entrada. Los AE antiguos tenían una FM residual del orden de 1KHz. Actualmente pueden estar en el orden de 1 a 8 Hz.")
59
Incertidumbre de amplitud
Los componentes que generan incertidumbre en la medición de amplitud son: conector de entrada (desadaptación) Atenuador RF Mixer y filtro de entrada (planicidad) Ganancia/Atenuación de FI (Reference level) Filtros FI (RBW) Fidelidad de la escala del display Calibrador (referencia para calibrar el equipo)
 Atenuador RF. Mixer y filtro de entrada (planicidad) Ganancia/Atenuación de FI (Reference level) Filtros FI (RBW) Fidelidad de la escala del display. Calibrador (referencia para calibrar el equipo)")
60
Incertidumbre de amplitud
Desadaptación: Tanto la impedancia del AE como la del DUT pueden estar desadaptadas provocando ondas reflejadas. Esto puede llevar a medir valores erróneos. Aumentar la atenuación disminuye la desadaptación. Sin embargo empeora la relación S/N. Agregar un atenuador externo con buena adaptación mejora la medición. Atenuador: Cada vez que se cambia el paso de atenuación se debe considerar una incerteza. El atenuador opera en un amplio rango de frec. y la exactitud de los pasos de atenuación varía con la frecuencia. El atenuador también contribuye a la respuesta en frecuencia del sistema

61
Incertidumbre de amplitud
Filtro de entrada: El filtro de entrada ( pasabajo para la banda inferior y preselector pasabanda para las bandas superiores) tiene una respuesta en frecuencia determinada. El filtro pasabajo (fijo) tiene mejor respuesta que el pasabanda ( Y.T.F) y agrega menor incertidumbre que este último. Mixer y LO: Tanto el mixer como el OL contribuyen a la incertidumbre por respuesta en frecuencia del sistema. La incertidumbre por respuesta en frecuencia depende de la planicidad de todos los componentes hasta el 1er mixer inclusive. ( luego se trabaja en una frecuencia fija) En algunos casos, si se cambia de banda se debe agregar una incertidumbre por band switching
 tiene una respuesta en frecuencia determinada. El filtro pasabajo (fijo) tiene mejor respuesta que el pasabanda ( Y.T.F) y agrega menor incertidumbre que este último. Mixer y LO: Tanto el mixer como el OL contribuyen a la incertidumbre por respuesta en frecuencia del sistema. La incertidumbre por respuesta en frecuencia depende de la planicidad de todos los componentes hasta el 1er mixer inclusive. ( luego se trabaja en una frecuencia fija) En algunos casos, si se cambia de banda se debe agregar una incertidumbre por band switching.")
62
Incertidumbre de amplitud
Ganancia/Atenuación de IF (Ref LVL accuracy): La etapa de FI amplifica/atenúa para compensar la perdida de conversión y la atenuación de RF. No contribuye a la respuesta en frecuencia pues trabaja en una frec fija. Existe una incertidumbre en que tan cerca de la referencia el amplificador lleva a una señal con nivel igual a Ref_LVL. RBW : Cada filtro de resolución tiene una pérdida de inserción diferente. Esta incerteza se llama RBW switching uncertainty Fidelidad de la escala: Si se trabaja en escala logarítmica, existe una incerteza introducida por el amp. Log. En que tan bien pude reproducir dicha escala. Mientras mas cerca del Ref. LVL se mida, menor será dicha incerteza.
: La etapa de FI amplifica/atenúa para compensar la perdida de conversión y la atenuación de RF. No contribuye a la respuesta en frecuencia pues trabaja en una frec fija. Existe una incertidumbre en que tan cerca de la referencia el amplificador lleva a una señal con nivel igual a Ref_LVL. RBW : Cada filtro de resolución tiene una pérdida de inserción diferente. Esta incerteza se llama RBW switching uncertainty. Fidelidad de la escala: Si se trabaja en escala logarítmica, existe una incerteza introducida por el amp. Log. En que tan bien pude reproducir dicha escala. Mientras mas cerca del Ref. LVL se mida, menor será dicha incerteza.")
63
Incertidumbre de amplitud
Incerteza Relativa: Al hacer mediciones relativas, algunos de los factores analizados pueden no tener efecto si no se modifica su seteo ( RBW, Ref LVL, etc.) , por ejemplo al medir distorsión armónica. Si se mide la diferencia entre 2 componentes, puede estar una en el max de la respuesta en frec, y la otra en el min, por lo que la incerteza es 2 veces la planicidad en este caso. Si las señales están en ditintas bandas, se deben analizar las planicidades de ambas bandas. incerteza Absoluta: La incerteza absoluta se define por la calibración. Los equipos generalmente proveen una frec de referencia para calibrarse (ej: 50MHz) En esta frecuencia, la incerteza es minima. Para las otras frecuencias se confia en la exactitud relativa del equipo para trasladar la referencia a otras frec y amplitudes.
 , por ejemplo al medir distorsión armónica. Si se mide la diferencia entre 2 componentes, puede estar una en el max de la respuesta en frec, y la otra en el min, por lo que la incerteza es 2 veces la planicidad en este caso. Si las señales están en ditintas bandas, se deben analizar las planicidades de ambas bandas. incerteza Absoluta: La incerteza absoluta se define por la calibración. Los equipos generalmente proveen una frec de referencia para calibrarse (ej: 50MHz) En esta frecuencia, la incerteza es minima. Para las otras frecuencias se confia en la exactitud relativa del equipo para trasladar la referencia a otras frec y amplitudes.")
64
Incertidumbre de amplitud

65
Incertidumbre de amplitud

66
Incertidumbre de frecuencia
Los AE modernos generan los OL a partir de un oscilador de referencia estable a partir de PLL. La incertidumbre de los OL es entonces la correspondiente al oscilador de referencia. Esta está afectada por aging (estabilidad a largo plazo), y temperatura .
, y temperatura .")
67
Señales pulsadas Las señales pulsadas pueden aparecer en aplicaciones como radares o circuitos de comunicaciones. La forma típica de una señal de este tipo es: Al no estar presente todo el tiempo en pantalla, no se puede obtener la misma visualización que con señales estables. La descripción de las señales pulsadas se basa en el espectro teórico de fourier La energía de una señal de pulsos periódicos aparece en componentes discretas n. (1/T) La envolvente de este espectro tiene ceros en frecuencias n.(1/τ).
 La envolvente de este espectro tiene. ceros en frecuencias n.(1/τ).")
68
Señales pulsadas Dependiendo de los valores de RBW, T y τ pueden darse 3 casos: El ancho de banda del filtro es chico comparado con la separación de las componentes espectrales de la señal pulsada. En este caso las componentes espectrales pueden resolverse y mostrarse. Se obtiene un espectro de líneas. El ancho de banda del filtro es mayor que la separación de las componentes, pero menor que los ceros del espectro En este caso no pueden separarse las componentes espectrales y solo se ve la envolvente de las mismas. El ancho de banda del filtro es mayor que los ceros del espectro. En este caso la señal no puede resolverse.

69
Señales pulsadas

70
Señales pulsadas En el espectro de líneas, la cantidad de líneas no depende del RBW. En el especto de envolvente, al cambiar la resolución, cambia la cantidad de líneas. La amplitud se incrementa al agrandar el RBW pues entran más componentes espectrales.

71
Señales pulsadas La amplitud medida de las señales pulsadas sufre una reducción de su valor. Esta variación se llama desensibilización de amplitud de pulso o en inglés PDF Para el espectro de líneas: Para el espectro de envolvente: El valor de K depende del tipo de filtro y vale 1 para filtro gaussiano. Existe un compromiso entre la degradación de amplitud y la capacidad de resolución al seleccionar el RBW

73
Bibliografia AN150-1_spectrum_analysis_basics
Solid State Radio Engineering - Krauss. Bostian, Raab - ©1980 Principles Of Microwave Measurements HP Spectrum analyzer basics Fundamental Of Spectrum Analysysis - RhodeSchwarz

Presentaciones similares


. Filtros Activos>")
















