Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Dr. Rogerio Enríquez Caldera (Graficas: Dr. Gustavo Rodríquez)
Física I Dr. Rogerio Enríquez Caldera (Graficas: Dr. Gustavo Rodríquez)
")
2
Vectores Definiciones Operaciones Básicas Componentes
Vectores en 2D y 3D Magnitud Unidades Marcos de referencia

3
Notación Se empleará la siguiente notación:
La recta de los números reales es denotada por El conjunto de los pares ordenados (x,y) es denotado por El conjunto de las ternas ordenadas (x,y,z) es denotado por ℝ³ ℝ ℝ²
 es denotado por. El conjunto de las ternas ordenadas (x,y,z) es denotado por ℝ³. ℝ. ℝ².")
4
Vectores en 2D y 3D Los puntos P en el plano se representan por pares ordenados de números reales (a1, a2) Los números a1 y a2 se llaman coordenadas cartesianas de P y P = (a1,a2) a2 x a1
 a2. x. a1.")
5
Vectores en 2D y 3D Los puntos P en el espacio se representan por ternas ordenadas de números reales (a1, a2, a3) Los números a1, a2 y a3 se llaman coordenadas cartesianas de P z P = (a1,a2,a3) a3 a2 y a1 x
 Los números a1, a2 y a3 se llaman coordenadas cartesianas de P. z. P = (a1,a2,a3) a3. a2. y. a1. x.")
6
Representación geométrica del punto (2,4,4)
")
7
Vectores Vectores: segmentos de rectas dirigidos en el plano o el espacio con un inicio y un final Los segmentos de recta que se obtienen uno de otro por traslación representan el mismo vector

8
Suma Vectorial y Multiplicación por un Escalar
Dadas dos ternas (a1, a2,a3) y (b1,b2,b3) definimos la suma vectorial como Dadas un escalar y un vector (a1, a2,a3) definimos el producto escalar por medio de
 y (b1,b2,b3) definimos la suma vectorial como. Dadas un escalar y un vector. (a1, a2,a3) definimos el producto escalar por medio de.")
9
Propiedades de los Vectores
Elemento cero Inverso aditivo

10
Propiedades de la Suma y Multiplicación Escalar

11
Geométricamente los vectores son flechas que salen del origen

12
Los vectores son segmentos de recta dirigidos en [el plano o] el espacio representados por segmentos de recta dirigidos con un inicio (cola) y un final (punta). Los segmentos de recta que se obtienen uno de otro por traslación paralela (pero no rotación) representan el mismo vector. Las componentes (a1,a2,a3) de a son las longitudes (dirigidas) de las proyecciones de a a lo largo de los tres ejes coordenados. La suma de dos vectores se obtiene colocándolos final con inicio y trazando el vector que va del inicio al final del segundo.
![Los vectores son segmentos de recta dirigidos en [el plano o] el espacio representados por segmentos de recta dirigidos con un inicio (cola) y un final (punta). Los segmentos de recta que se obtienen uno de otro por traslación paralela (pero no rotación) representan el mismo vector.](http://slideplayer.es/slide/12335583/73/images/12/Los+vectores+son+segmentos+de+recta+dirigidos+en+%5Bel+plano+o%5D+el+espacio+representados+por+segmentos+de+recta+dirigidos+con+un+inicio+%28cola%29+y+un+final+%28punta%29.+Los+segmentos+de+recta+que+se+obtienen+uno+de+otro+por+traslaci%C3%B3n+paralela+%28pero+no+rotaci%C3%B3n%29+representan+el+mismo+vector..jpg "Las componentes (a1,a2,a3) de a son las longitudes (dirigidas) de las proyecciones de a a lo largo de los tres ejes coordenados. La suma de dos vectores se obtiene colocándolos final con inicio y trazando el vector que va del inicio al final del segundo.")
13
Vector Que Une Dos Puntos

14
El Vector Que Une Dos Puntos
Si el punto P tiene coordenadas (x, y, z) y P’ tiene coordenadas (x’, y’, z’) entonces el vector PP’ de la punta de P a las punta de P’ tiene componentes
 y P’ tiene coordenadas (x’, y’, z’) entonces el vector PP’ de la punta de P a las punta de P’ tiene componentes.")
15
Distancia Dados dos vectores a = a1i+a2j+a3k y b = b1i+b2j+b3k, la distancia entre los puntos finales de a y b se define como z b a x

16
Suma de vectores (a) b a a+b b
 b a a+b b")
17
Suma de Velocidades Una ave volando con velocidad v1, velocidad el viento v2. Velocidad resultante v1 + v2

18
Suma de Vectores (b)
")
19
Equivalencia Geométrica con Algebraica
Equivalencia de la definición de suma vectorial en forma geométrica y algebraica.

20
Interpretación Geométrica Multiplicación Escalar por un Vector

21
Interpretación Geométrica de la Resta de Dos Vectores

22
Distancia Dados dos vectores a = a1i+a2j+a3k y b = b1i+b2j+b3k, la distancia entre los puntos finales de a y b se define como z b a x

23
Suma de los Vectores u + v y -2u

24
Multiplicación de (-1,1,2) por -2
 por -2")
25
Base Canónica Existen tres vectores especiales a lo largo de los ejes x, y, z: i: (1,0,0) J: (0,1,0) k: (0,0,1) Sea (a1, a2,a3) entonces a = a1i+ a2j+ a3k z k y j i x
 Sea (a1, a2,a3) entonces. a = a1i+ a2j+ a3k. z. k. y. j. i. x.")
26
Base Canónica Representación del vector (2,3,2) en términos de la base canónica
 en términos de la base canónica")
27
Los Tres Planos Coordenados

28
Producto Interno Dados dos vectores a = a1i+a2j+a3k y b = b1i+b2j+b3k, el producto interno de a y b se define como Nótese que el producto interno es un escalar.

29
Producto Interno Propiedades del producto interno. Sean a, b, c vectores en ℝ³ y números reales, entonces

30
Longitud Dado un vector a = a1i+a2j+a3k en ℝ³ definimos su longitud como z P = (a1,a2,a3) a3 a2 y a1 x

31
Vectores Normalizados
Dado el vector a = a1i + a2j + a3k diferente de cero, para normalizarlo forme el vector

32
Ejemplos Normalizar el vector v = 15i – 2j + 4k. Solución
La normalización del vector v está dada por

33
Ejemplos Defina en el plano el vector Observe que es un vector
Unitario.

34
Vectores Ortogonales Si a y b son vectores diferentes de cero y es el ángulo entre ellos. Entonces si y sólo si los vectores son ortogonales. Ejemplo Los vectores de la base canónica i, j, k, son ortogonales entre si. Los vectores y son ortogonales.

35
Vectores Ortonormales

36
A a B

37
A cB B

38
A C Por tanto A = k B + C a K B B

39
A C Por tanto A = k B + C a K B B ¿Cómo despejar o reslover para k?

40
Usemos lo que conocemos:
i) Ortogonalidad o perpendicularidad ii) Producto punto
 Ortogonalidad o perpendicularidad. ii) Producto punto.")
41
Por otro lado:

42
A a B

43
A a K B B cos (180 – a ) = cos 180 cos a + sen 180 sen a = cos a
 = cos 180 cos a + sen 180 sen a = cos a")
44
a B A

45
u x u A a B A

46
Por tanto si A es unitario
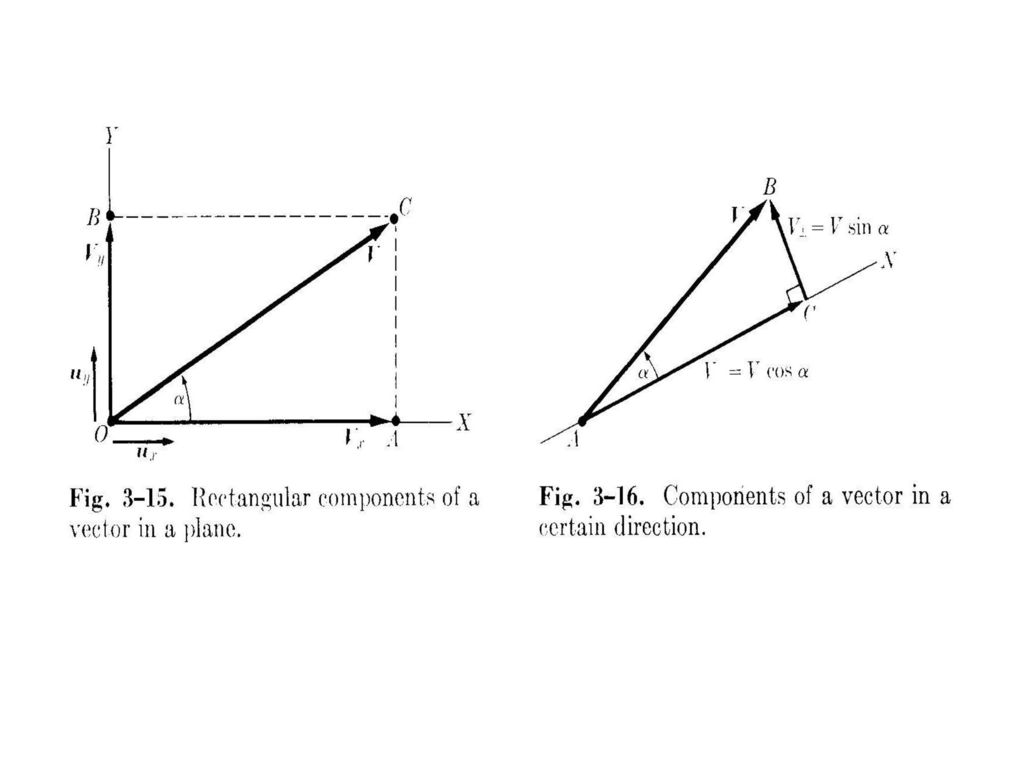
u B = || u || || B || cos a = Bu Y por tanto si || B || solo escribimos B Bx = B cos a By = B sen a porqué? Y asi B = ux B cos a + uy B sen a = B ( ux cos a + uy sen a )
")
49
Ejemplos Calcule el angulo entre los vectores
A = 2i + 3j – k y B = - i + j + 2k Solución: Usando

50
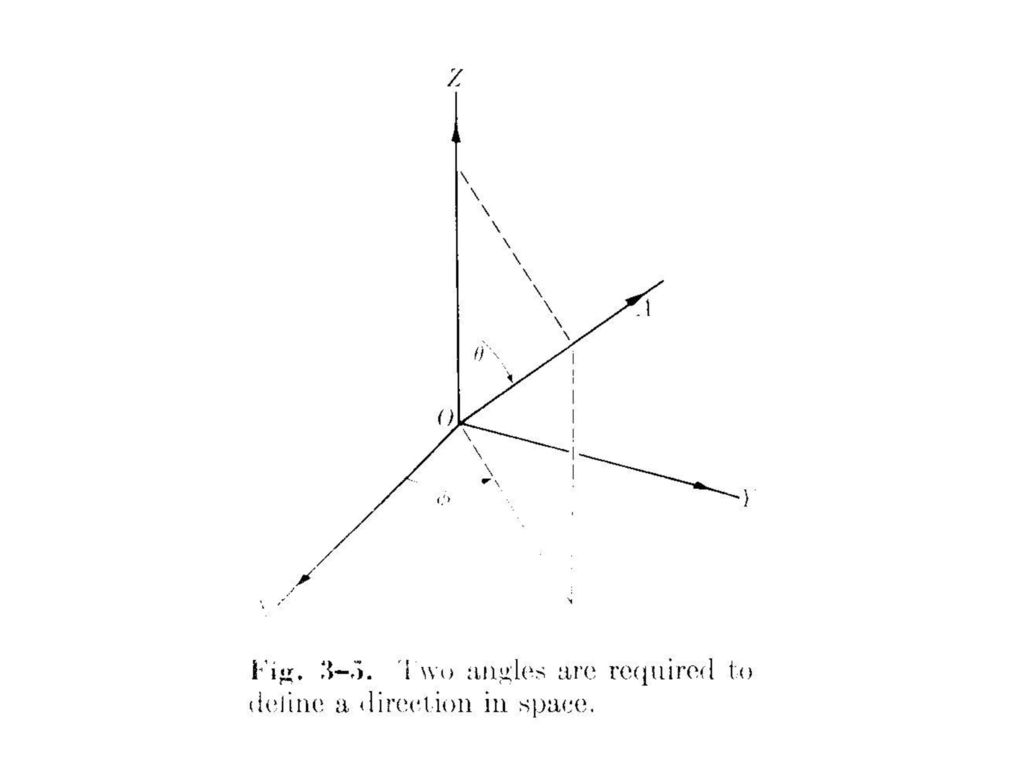
Reflexiones Ángulo en grados o en radianes Se mide con respecto a que?
Ejemplo en el Planeta Tierra

54
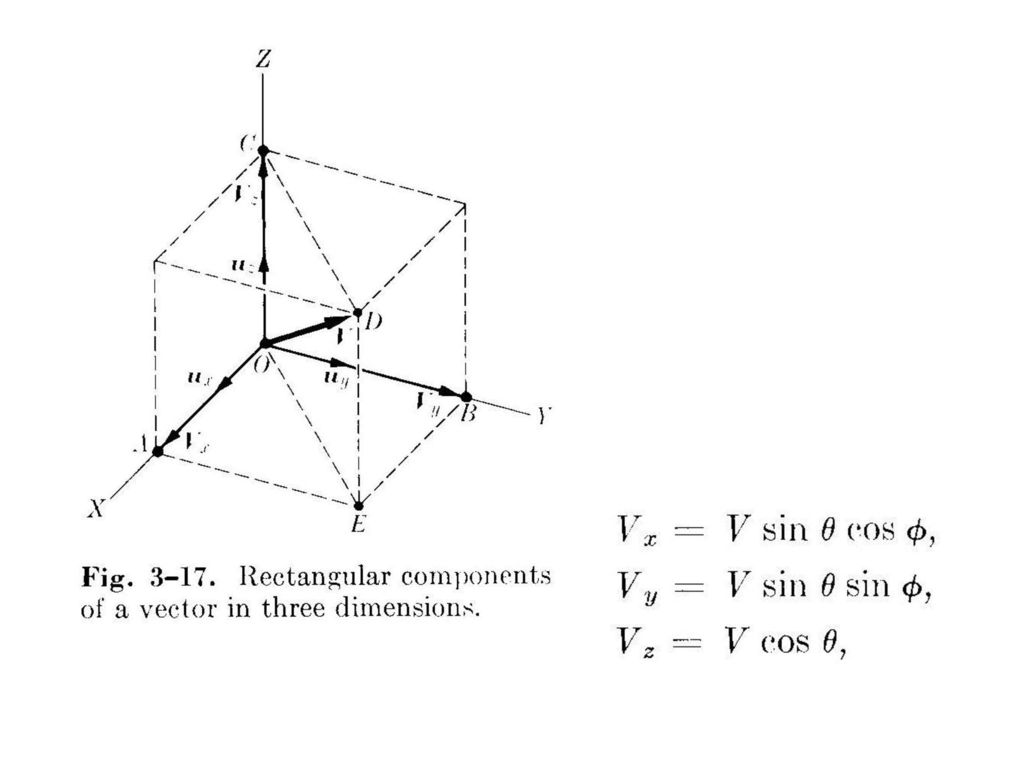
Ejemplos Encuentre los angulos que forma el vector A = 2i + 3j + 2k con los ejes x & z Solución

55
Base Canónica Representación del vector (2,2,2) en términos de la base canónica
 en términos de la base canónica")
56
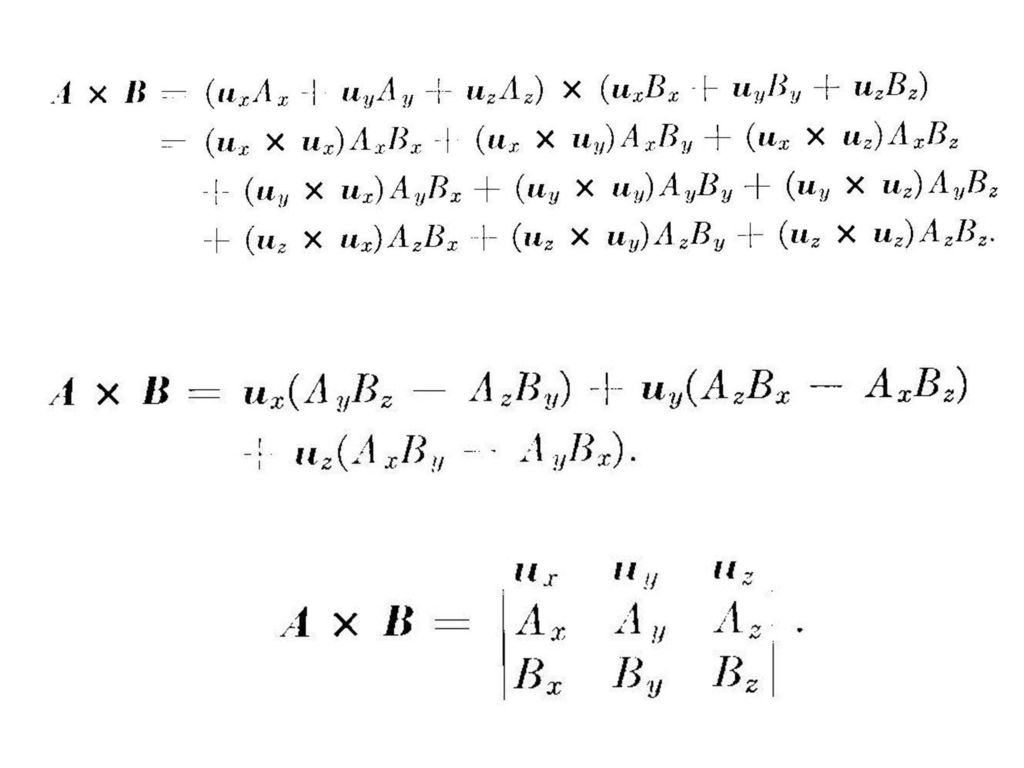
A x B No es conmutativa A x B = - B x A Es asociativa? Es distributiva ? | A x B | = A B sen q

59
Significado Físico?

Presentaciones similares