Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Redes Neuronales Artificiales (ANN)
")
2
Modelos Conexionistas Consideraciones Humanas
Tiempo de Conmutación de una Neurona Número de Neuronas Conexiones por Neurona Tiempo de reconocimiento de escena Computación Paralela ~0.001s ~1010 ~104-5 ~0.1s

3
Modelos Conexionistas Propiedades de ANN
Muchos unidades de conmutación como neuronas Muchas interconexiones pesadas entre unidades Necesidad de procesamiento en paralelo y distribuido Énfasis en el ajuste de pesos automáticamente

4
¿Cuándo considerar la ANN?
La entrada es discreta con muchas dimensiones o continua (ej. sensores) Salida discreta o continua La salida es un vector de valores Posibles datos ruidosos La forma de la función objetivo es desconocida La compresión del modelo no es importante
 Salida discreta o continua. La salida es un vector de valores. Posibles datos ruidosos. La forma de la función objetivo es desconocida. La compresión del modelo no es importante.")
5
¿Cuándo considerar la ANN?
Ejemplos: Reconocimiento de fonemas hablados Clasificación de Imágenes Predicción financiera

6
Proyecto ALVINN

7
Perceptrón Escrita en notación vectorial

8
Superficie de decisión de un Perceptrón
Representa algunas funciones útiles Cuáles serían los pesos para representar Algunas funciones no son representables Ej. Funciones no separables linealmente

9
Superficie de decisión de un Perceptrón

10
Regla de entrenamiento del Perceptrón
donde donde es el valor objetivo es la salida del perceptrón es una constante pequeña (ej. 0.1) llamada learning rate
 llamada learning rate.")
11
Adaline (Unidad Lineal)
")
12
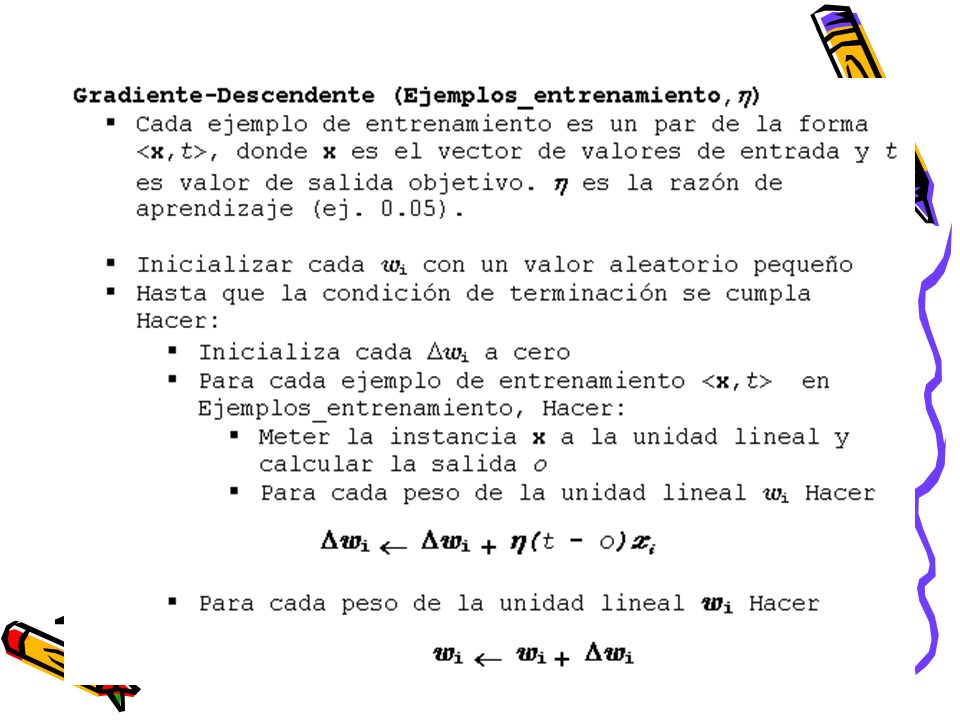
Gradiente Descendente
Para entender, considere una unidad linear simple donde Vamos a aprender las wi que minimicen Donde D es el conjunto de ejemplos de entrenamiento

13
Gradiente Descendente
Regla de Aprendizaje

14
Gradiente Descendente

16
La regla del perceptron garantiza su convergencia si
Los ejemplos de entrenamiento son linealialmente separables La razón de aprendizaje sea suficientemente pequeña

17
La regla de entrenamiento de la unidad lineal usan el gradiente descendente y garantiza su convergencia a hipótesis con el error cuadrático mínimo Dada una razón de aprendizaje sea suficientemente pequeña Aún cuando los datos de entrenamiento sean ruidosos Aun cuando los datos de entrenamiento no sean separables por H

18
Cálculo del Gradiente Descendente
En modo en lotes Hacer hasta satisfacer Calcular el Gradiente Asignar

19
Cálculo del Gradiente Descendente
En modo incremental Hacer hasta satisfacer Para cada ejemplo de entrenamiento d en D Calcular el Gradiente Asignar

20
El Gradiente Descendente Incremental puede aproximar al Gradiente Descendente en Lotes si η es suficientemente pequeña

21
Redes Neuronales Multicapa de Unidades Sigmoidales

23
Unidad Sigmoidal = y

24
Se puede derivar la regla del Gradiente Descendente para entrenar:
Una unidad sigmoidal Redes Neuronales Multicapa Backpropagation

25
Gradiente del Error de una unidad sigmoidal

26
Pero sabemos que: Asi que:

Presentaciones similares

















 Se propone lograr que las computadoras se comporten de manera que podamos reconocerlas como inteligentes. Tiene por.>")


 - Francisco García Fernández. Dr. Ingeniero de Montes - Luis García Esteban. Dr. Ingeniero.>")
