Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Unidad V: Estimación de
Parámetros

2
Propósito de la Inferencia de estadística
Estimación de parámetros Pruebas de Hipótesis Puntual Intervalar Nivel de Confianza Métodos de Estimación Momentos Máximo Verosímil Propiedades Método del Pivote

3
Pruebas de Hipótesis Concepto Tipos de errores Hipótesis Nula Hipótesis alternativa Unilateral Bilateral Nivel de Confianza Valor-p Región Crítica Decisión

4
5.1 Propósito de la Inferencia de estadística
Cuando se habla de obtener conclusiones respecto de una población particular, nos estamos refiriendo a algunas características distribucionales de la población, específicamente a parámetros que caracterizan la distribución poblacional. Esto significa que la inferencia en cuestión será relativa a un conjunto de parámetros poblacionales. Una muestra aleatoria de tamaño n, es cuando se tienen X1, X2,…,Xn variables aleatorias independientes, donde cada una de las Xi tiene la misma distribución de probabilidades. Si X1, X2,…, Xn es una muestra aleatoria de una variable aleatoria X, entonces se acostumbra a llamar a X variable aleatoria poblacional o sencillamente población.

6
El propósito en la inferencia, es utilizar los elementos de la muestra para determinar todos los aspectos desconocidos de nuestro interés, en la mejor forma posible, al considerar la distribución de probabilidades de la población. Ciertas funciones de los elementos de una muestra aleatoria tales como:

7
Cualquier función de los elementos de una muestra aleatoria que no dependa de algún parámetro desconocido de llama estadístico. Los estadísticos son, por lo tanto, variables aleatorias, cuyos valores observados pueden ser evaluados después que los valores observados para X1, X2,…, Xn son conocidos. Como los estadísticos son variables aleatorias, sus valores variarán de muestra en muestra y tiene sentido determinar la distribución de estas variables aleatorias, las cuales se conocen como distribuciones muestrales.

8
5.2 Métodos de Estimación Los problemas de inferencia estadística se dividen en dos áreas: Estimación de parámetros y Pruebas de Hipótesis. Generalmente en un problema de estimación de parámetros se dispone una muestra aleatoria de una variable poblacional X, cuya distribución de probabilidades se supone conocida, salvo por algunos parámetros que son desconocidos.

9
5.3 Método por momentos Propuesto por Karl Pearson (1894). Sea q(θ), una función que deseamos estimar. El método por momentos consiste en escribir la función de θ, q(θ), como una función continua h de los primeros r momentos poblacionales, esto es, donde k = E(Xk) es el k-ésimo momento poblacional; k = 1,2,…,r y luego considerar como estimador por momentos a
. Sea q(θ), una función que deseamos estimar. El método por momentos consiste en escribir la función de θ, q(θ), como una función continua h de los primeros r momentos poblacionales, esto es, donde k = E(Xk) es el k-ésimo momento poblacional; k = 1,2,…,r y luego considerar como estimador por momentos a.")
10
Ejemplo Una muestra aleatoria de n observaciones X1,…,Xn se selecciona desde una población con distribución uniforme sobre el intervalo (0, θ), en que θ es desconocido. Deseamos encontrar, mediante el método de los momentos, un estimador de θ. El valor de 1 para una variable aleatoria uniforme es 1 = E(X) = θ/2. es el primer momento muestral. Por tanto, el E. por M de θ es:
, en que θ es desconocido. Deseamos encontrar, mediante el método de los momentos, un estimador de θ. El valor de 1 para una variable aleatoria uniforme es 1 = E(X) = θ/2. es el primer momento muestral. Por tanto, el E. por M de θ es:")
11
Ejemplo Supongamos que queremos estimar, por el método de momentos, la varianza, 2, de una población cualquiera X. Sabemos que: Luego, si consideramos una muestra aleatoria X1,…, Xn de esta población, tenemos que el primer estimador por momento de la varianza poblacional 2 es

12
5.4 Método Máximo Verosímil
El método de máxima verosimilitud consiste en obtener, como estimadores, aquellos valores de los parámetros que maximizan la función de verosimilitud.

13
En la mayoría de los casos el estimador máximo verosímil (EMV) de θ, se puede determinar desde
Dado que L(θ) es siempre no negativa y logra su máximo para el mismo valor de θ que ln(L), generalmente resulta más simple obtener el EMV de θ resolviendo:
 es siempre no negativa y logra su máximo para el mismo valor de θ que ln(L), generalmente resulta más simple obtener el EMV de θ resolviendo:")
14
Propiedades importantes de los EMV
La extensión al caso de varios parámetros es natural. Si tenemos m parámetros, la función de verosimilitud es L(θ1,…, θm; x1,…, xn) y los EMV de θj; j = 1,…, m los obtenemos resolviendo el sistema de ecuaciones. Invarianza:
 y los EMV de θj; j = 1,…, m los obtenemos resolviendo el sistema de ecuaciones. Invarianza:")
15
Ejemplo Supongamos que x = x1,…, xn corresponden a la realización de n ensayos Bernoulli independientes con probabilidad de éxito θ en cada ensayo, donde xi = 1 si el iésimo ensayo es un éxito y xi = 0 si es un fracaso. Queremos determinar el estimador máximo verosímil de la probabilidad de éxito θ. La función de verosimilitud de la muestra observada es: Notemos que L es igual a cero para θ = 0 y 1, y es continua para valores entre 0 y 1.

16
Entonces: cuya derivada es Luego, el valor de θ que maximiza l(θ; x) es la solución de la ecuación: cuya solución es:

17
Ejemplo Supongamos que X1,…,Xn representan los tiempos de fallas para una cierta pieza de un equipo y que los tiempos de vida son exponenciales e independientes con parámetro (desconocido). Queremos encontrar el estimador vorsímil para . Sean x = x1,…, xn los valores observados de X1,…, Xn. La función de verosimilitud es entonces:
. Queremos encontrar el estimador vorsímil para . Sean x = x1,…, xn los valores observados de X1,…, Xn. La función de verosimilitud es entonces:")
18
5.5 Distribución de la media muestral
Teorema 5.1 Si X1,X2,…,Xn es una muestra aleatoria de una población X que tiene media y varianza 2, entonces el PROMEDIO tiene valor esperado y varianza 2/n , Teorema 5.2 Si X1,X2,…,Xn es una muestra aleatoria de una población normal de parámetros y 2 , entonces

19
Recordemos que la f.g.m de una distribución normal esta dada por
En efecto:

20
Teorema 5.3 Si X1,X2,…,Xn es una muestra aleatoria de una población infinita que tiene media y varianza 2, entonces la distribución límite de Zn, donde es la distribución Normal estándar.

21
Ejemplo Una máquina puede ser regulada de modo que descargue un promedio de kilos por hora ( desconocido). Se ha observado que la cantidad descargada por la máquina se distribuye normal con 2=1.0kg. Se selecciona al azar una muestra de tamaño n = 9 horas de descarga, pesando el total descargado en cada hora seleccionada. Se desea encontrar la probabilidad que la media muestral esté entre +/-0.3 kg. de la verdadera media . Si definimos la variable aleatoria Yi como el peso total descargado en la hora i, entonces Yi se distribuye N(,1), para todo i=1,…,9, por lo tanto, de acuerdo al Teorema 5.2
. Se ha observado que la cantidad descargada por la máquina se distribuye normal con 2=1.0kg. Se selecciona al azar una muestra de tamaño n = 9 horas de descarga, pesando el total descargado en cada hora seleccionada. Se desea encontrar la probabilidad que la media muestral esté entre +/-0.3 kg. de la verdadera media . Si definimos la variable aleatoria Yi como el peso total descargado en la hora i, entonces Yi se distribuye N(,1), para todo i=1,…,9, por lo tanto, de acuerdo al Teorema 5.2.")
22
La probabilidad que deseamos determinar es
utilizando las tablas de la distribución normal estándar, obtenemos Así, la probabilidad que la media muestral esté dentro de +/- 0.3 de la media poblacional es

23
5.6 Distribución de la varianza muestral S2
Teorema 5.4 Si X1,X2,…,Xn es una muestra aleatoria de una distribución con media y varianza 2, entonces la varianza muestral S2 tiene valor esperado igual a 2. Teorema 5.5 Sea X1,X2,…,Xn una muestra aleatoria de una población X cuya distribución es normal de media y varianza 2, entonces:

24
Ejemplo Consideremos nuevamente el Ejemplo anterior y supongamos que extraemos una muestra aleatoria de tamaño n = 10. si estas observaciones son utilizadas para calcular S2, podría ser útil especificar un intervalo de valores que incluya a S2 con alta probabilidad; esto es, encontrar por ejemplo los números b1 y b2 tales que: Para así tener

25
Teorema 5.6 Si X1,X2,…,Xn es una muestra aleatoria de una población normal con media y varianza 2, entonces Para aclarar confusiones con respecto al uso de la distribución Normal (estándar) y la distribución t-student, en relación a expresiones del tipo
 y la distribución t-student, en relación a expresiones del tipo.")
26
o en el caso de la media Si el valor de es conocido y el tamaño de n es suficientemente grande, entonces Z tendrá distribución normal estándar. Si es desconocida y la población de donde está muestreando es normal, entonces la distribución de T será la de una t – student con (n-1) grados de libertad.
 grados de libertad.")
27
Ejemplo La resistencia a la tracción de un cable se distribuye normalmente con media y varianza 2 ambas desconocidas. Se seleccionan al azar 6 trozos de alambre y se mide la resistencia Xi de cada uno de ellos. Deseamos encontrar la probabilidad que es equivalente a calcular

28
Donde Esta probabilidad corresponde aproximadamente a

29
5.7 Propiedades de los estimadores puntuales
Es interesante establecer algunos criterios bajo los cuales la calidad de un estimador puede ser evaluada. Estos criterios definen, en general, propiedades deseables de los estimadores que nos sirven para compararlos. Sesgo: Estimadores Insesgados:

30
Por lo tanto, dados dos estimadores para el parámetro θ, y siendo todo el resto de las condiciones equivalentes para ambos, se elegirá siempre aquel de menor varianza.

31
Ejemplo La respuesta está en la desigualdad de Cramer-Rao que proporciona una cota inferior para la varianza de cualquier estimador insesgado del parámetro de una distribución de probabilidades, bajo condiciones de regularidad que incluyen:

32
El espacio de valores de la variable aleatoria involucrada debe ser independiente del parámetro.
La función de densidad (o función de probabilidad) debe ser una función continua y diferenciable del parámetro. Teorema 5.7 (Cramer-Rao). Sea X1,…,Xn una muestra aleatoria de tamaño n de una población X con función de densidad (o función de probabilidad) f(x,θ), que depende de un parámetro θ desconocido, y satisface las condiciones de regularidad.
 debe ser una función continua y diferenciable del parámetro. Teorema 5.7 (Cramer-Rao). Sea X1,…,Xn una muestra aleatoria de tamaño n de una población X con función de densidad (o función de probabilidad) f(x,θ), que depende de un parámetro θ desconocido, y satisface las condiciones de regularidad.")
33
La cantidad I(θ) es conocida como cantidad de información o Información de Fisher. De aquí que la CCR también se conoce con el nombre de Desigualdad de Información. En la clase de estimadores insesgados, la cota inferior en la desigualdad de información es 1/I(θ), independientemente del estimador que estemos considerando. La desigualdad de Cramer-Rao se puede escribir como:
, independientemente del estimador que estemos considerando. La desigualdad de Cramer-Rao se puede escribir como:")
34
La CCR puede extenderse fácilmente para ciertas transformaciones del parámetro. Específicamente, si φ = g(θ) es una transformación uno a uno y diferenciable, entonces:
 es una transformación uno a uno y diferenciable, entonces:.")
36
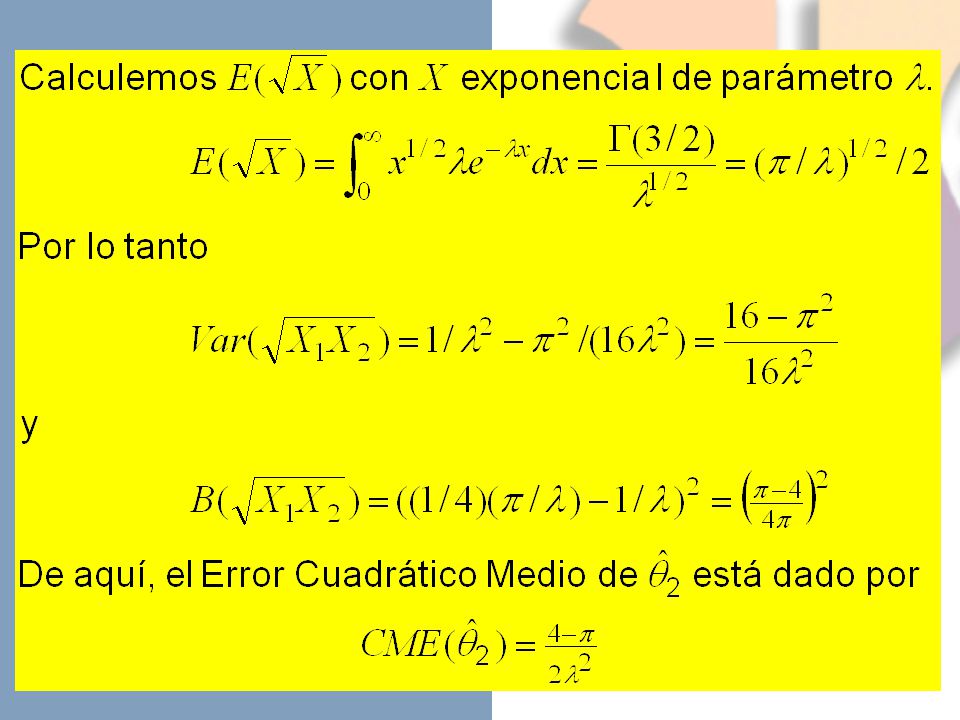
Ejemplo Sea X1, X2 una muestra aleatoria de tamaño 2 de X con distribución Exponencial de parámetro desconocido.

38
Teorema 5.8

39
Ejemplo Sea X1,…,Xn una muestra aleatoria de una población con distribución de probabilidades con media y varianza 2 < .

40
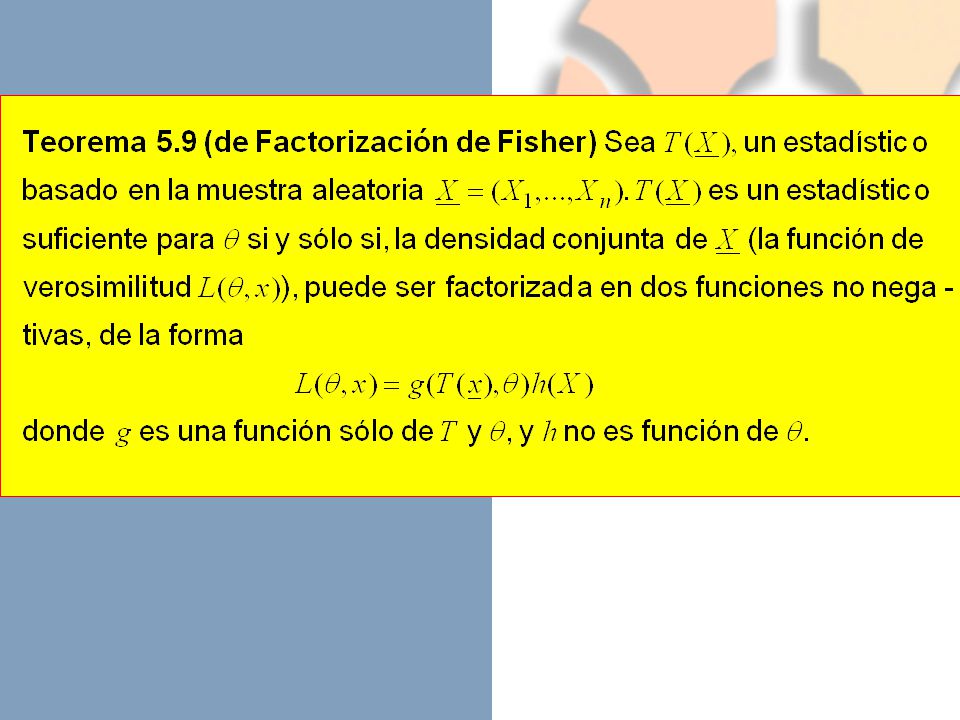
Sea X1,…,Xn una muestra aleatoria de una distribución de probabilidades con parámetro desconocido θ. T = T(X1,…,Xn) es un estadístico suficiente para θ, si y sólo si, la distribución condicional de (X1,…,Xn) dado T = t, para todo valor de t, es independiente de θ.
 es un estadístico suficiente para θ, si y sólo si, la distribución condicional de (X1,…,Xn) dado T = t, para todo valor de t, es independiente de θ..")
41
Ejemplo Consideremos los resultados observados de n ensayos Bernoulli independientes X1,…,Xn donde Xi = 1 con probabilidad p y es 0 con probabilidad 1 – p. Una manera de responder es observar la distribución condicional de X1,…,Xn dado T = t; esto es:

43
Ejemplo Sea X1,…,Xn una muestra aleatoria de una población con distribución exponencial con media ; esto es, Xi posee función de densidad. La función de verosimilitud de la muestra es la densidad conjunta

44
Ejemplo Sea X1,…,Xn una muestra aleatoria de una distribución uniforme en (0,θ) y determinemos un estadístico suficiente para θ. La función de verosimilitud de la muestra aleatoria es lo que es equivalente a escribir Así, tenemos la factorización donde es la función indicadora de un conjunto A.

45
Ejemplos: Prob.: Se registraron los siguientes datos, en días, que representan el tiempo de fabricación de un determinado producto con dos procesos distintos. Proceso Proceso a) Encuentre un I. de C del 95% para el tiempo promedio de fabricación del proceso 1. b) Se cree que la persona que tomó los datos en el proceso 1 no lo hizo correctamente, ya que experiencias anteriores indican que la varianza es de 12,9683. Para demostrar que S obtenida anteriormente estaba errada, se considera una nueva muestra aleatoria de 10 tiempos. ¿Cuál es la probabilidad que la varianza muestral de esta nueva muestra, supere el valor obtenido anteriormente?.
 Encuentre un I. de C del 95% para el tiempo promedio de fabricación del proceso 1. b) Se cree que la persona que tomó los datos en el proceso 1 no lo hizo correctamente, ya que experiencias anteriores indican que la varianza es de 12,9683. Para demostrar que S obtenida anteriormente estaba errada, se considera una nueva muestra aleatoria de 10 tiempos. ¿Cuál es la probabilidad que la varianza muestral de esta nueva muestra, supere el valor obtenido anteriormente .")
46
Ejemplos: Prob.: Se registraron los tiempos utilizados en la compra para 64 clientes seleccionados al azar en un supermercado local. La media y la varianza de los 64 tiempos de compra fueron 33 minutos y 256, respectivamente. Encuentre un I. de C. del 95 % para el verdadero tiempo promedio.

Presentaciones similares