Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Ing. Armando Martínez Reyes Instituto Tecnologico de Nuevo León

2
Procesos Industriales

3
Lazo Abierto y Cerrado

4
Lazo Cerrado

5
Modo de control con Banda de Histéresis
Controladores El Objetivo de un sistema de control automático, en minimizar el error en el menor tiempo posible pero evitando sobre disparos excesivos (recomendado no mayor al 20%) Modo de Control ON-OFF Modo de control con Banda de Histéresis
 Modo de Control ON-OFF. Modo de control con Banda de Histéresis.")
6
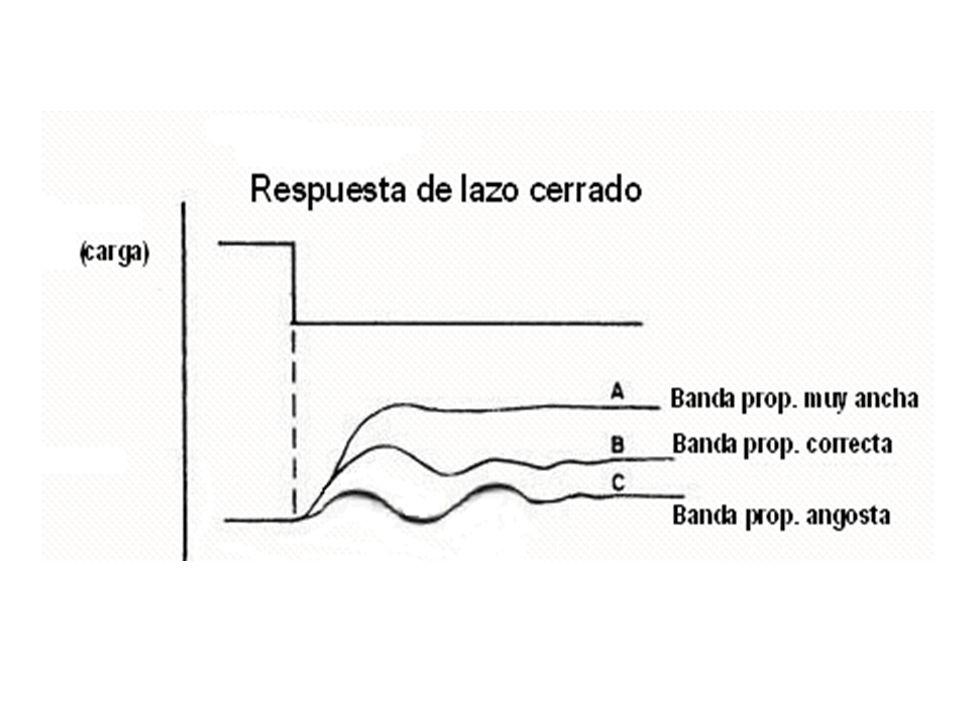
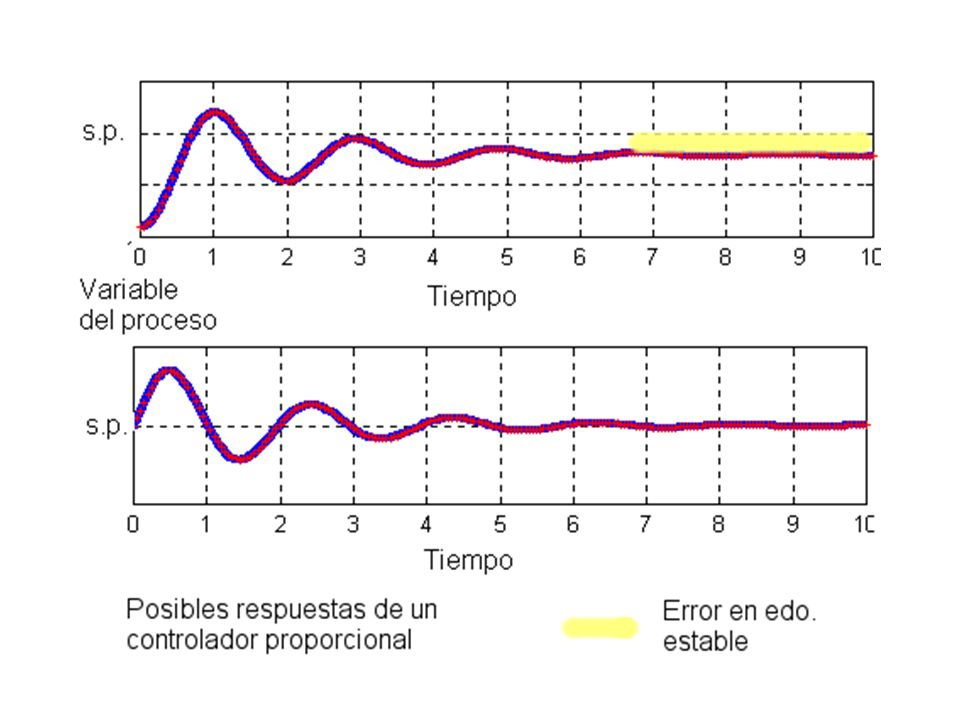
Modo de Control Proporcional
Modo de control proporcional: Actúa en función de la MAGNITUD DEL ERROR

9
Acción integral Modo de control integral: Actúa en función de la DURACION DEL ERROR

10
Modo de Control P+I Modo de control p+i: elimina el error en edo. Estable y responde rápido por la magnitud del error.

11
Acción derivativa Modo de control derivativo: Actúa en función de la RAZON DE CAMBIO DEL ERROR

12
P+I+D %BP BANDA PROPORCIONAL TR TIEMPO DE RESET TD TIEMPO DERIVATIVO

13
Sintonización de Modos de Control
Método I (excitando el proceso con entrada escalón en la manipulación) Control Proporcional Colocar manualmente medición, descarga y set-point en 50% y ajustar %BP al máximo. Colocar en controlador en en automático Someter el ctl en cambio escalón en ref. Graficar respuesta e ir reduciendo la %BP hasta lograr la respuesta deseada El ajuste deberá proporcionar un amortiguamiento aceptable
 Control Proporcional. Colocar manualmente medición, descarga y set-point en 50% y ajustar %BP al máximo. Colocar en controlador en en automático. Someter el ctl en cambio escalón en ref. Graficar respuesta e ir reduciendo la %BP hasta lograr la respuesta deseada. El ajuste deberá proporcionar un amortiguamiento aceptable.")
14
Proporcional + reset Ajuste el T.R. = periodo natural del proceso/ 2.4 Ajuste %BP con pasos anteriores. P+I+D 1 Fijar tiempo reset al máximo 2. Fijar tiempo derivativo al mínimo Ajustar el %BPsegún procedimiento anterior, pero dejando una ligera oscilación en la medición Incrementar el tiempo derivativo hasta que la oscilación en la medición desaparezca. Reducir %BP. ligeramente hasta el limite punto en inicie la oscilación de nuevo 6. Fijar el tiempo de reset (T.R.) = al tiempo derivativo
 = al tiempo derivativo.")
15
METODO EMPLEANDO CURVA DE REDUCCION (LAZO ABIERTO)
Se usa en procesos pasivos que no tengan energía independiente (ganancia < 1)
")
16
1- Someter el proceso a escalón (manipulación o carga 2
1- Someter el proceso a escalón (manipulación o carga 2.-De la gráfica trazar la máxima tangente a la curva 3-Obtener los factores L y D y el parámetro, R = L / D el cual describe la respuesta dinámica.

17
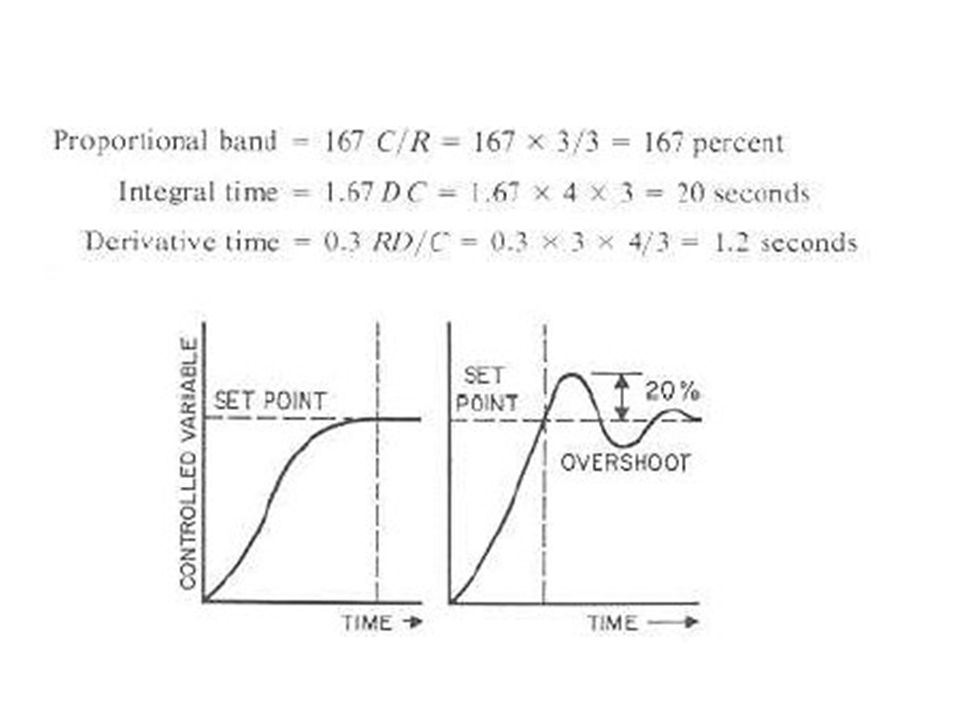
El parámetro L representa la velocidad de respuesta del proceso y el parámetro D representa el retardo inicial, típico de un sistema de 2´Orden. El tercer y ultimo parámetro requerido es C ,que representa la ganancia del proceso (pendiente de %cambio de la válvula y %cambio de variable controlada). Span =200¨F, cambio de temperatura 30¨F (15%) y la válvula abrió 5% , así c=15/5=3
. Span =200¨F, cambio de temperatura 30¨F (15%) y la válvula abrió 5% , así c=15/5=3.")
19
Método utilizando periodo de oscilación de lazo cerrado
1.- fijar tr= máximo 2.- fijar td=mínimo 3.- fijar %BP=máximo 4.- colocar el control en automático, e ir reduciendo la banda proporcional hasta lograr una oscilación constante con una amplitud A lo menor posible anotar %BP=Bu. (esto es como convertir el control en un on-off). Tr=Td= Tu/6 %BP= 1.77*Bu
. Tr=Td= Tu/6. %BP= 1.77*Bu.")
20
Mapas de sintonía, es un método grafico que permite reajustar en operación a un controlador.
Utilizado para ajuste fino en procesos en operación, seleccionas la respuesta actual y a la que deseas llegar, el mapa te indica a que le debes de ajustar

21
Mapa de sintonía para P+I+D

22
Gracias por su atención
Material disponible en :

Presentaciones similares