Descargar la presentación
La descarga está en progreso. Por favor, espere

1
CAPACITACIÓN PARA LOS ESTADOS MIEMBROS DE LA
CURSO CAPEV 2012 CURSO DE CAPACITACIÓN VIRTUAL: ENERGÍA EÓLICA, IMPLEMENTACIÓN DE PROYECTOS APLICANDO SISTEMAS HÍBRIDOS Dr. Oscar Alfredo Jaramillo Salgado Centro de Investigación en Energía. Universidad Nacional Autónoma de México de Agosto 2012

2
5. Sistemas autónomos de energía eólica
D. WOOD, University of Newcastle, Australia and P. FREERE, Monash University, Australia Este capítulo describe las pequeñas turbinas de viento y su uso en sistemas de energía autónomos con el almacenamiento en baterías convencionales. Componentes de la turbina, tales como los generadores, palas y las torres son revisados para poner de relieve su influencia en el rendimiento de la turbina y la seguridad en el funcionamiento autónomo. Un tema importante en el diseño de estos sistemas es la correcta caracterización del recurso eólico, que se complica por la necesidad de considerar la dependencia temporal de las cargas eléctricas para determinar con precisión el tamaño del banco de baterías necesario. Las turbinas pequeñas, de menos de alrededor de 50 kW de potencia nominal, se utilizan para una amplia gama de aplicaciones independientes de pequeños sistemas de electrificación en los países en desarrollo, a los grandes sistemas de energía a distancia en los países occidentales. El requisito de tipo y la potencia de la carga puede tener un impacto significativo en el diseño del sistema y la elección del inversor.

3
Contenido 5.1 Introducción 5.2 Sistemas autónomos de energía eólica
5.3 Tecnología de pequeñas de turbinas de viento 5.4 Control y electrónica 5.5 Sistemas autónomos de energía 5.6 Otros aspectos del tamaño del sistema 5.7 Conclusiones

4
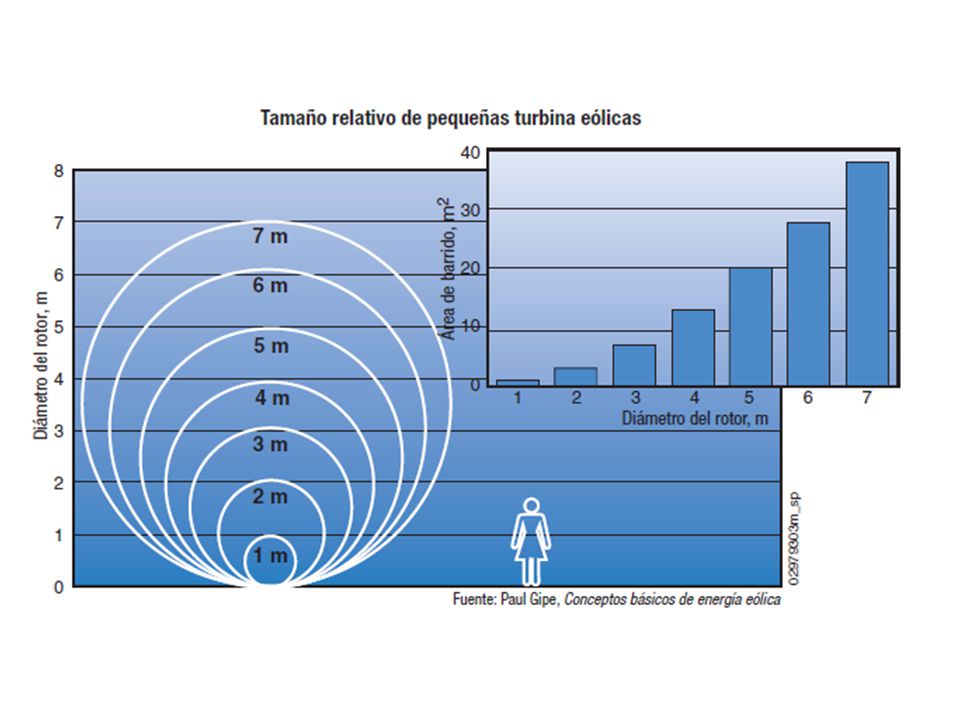
5.1 Introducción El tema de este capítulo es los sistemas autónomos de energía eólica sin sistemas fotovoltaicos (PV). Es necesario, sin embargo, al diseñar un sistema de energía a distancia para saber lo suficiente acerca de las ventajas y desventajas de cada tecnología renovable para hacer una elección inteligente de para su uso. Se describe con detalle la tecnología de los aerogeneradores pequeños. Esto se hace principalmente en comparación con las turbinas de gran tamaño. La Comisión Electrotécnica Internacional en sus normas de seguridad para pequeñas turbinas de viento, la CEI (2006), define una pequeña turbina de viento como aquel que presenta un área de rotor inferior a 200 m2 (diámetro de 16m), que corresponde a una potencia nominal de 50 kW o menos. Esto es aproximadamente el intervalo que se toma en cuenta. El generador de la turbina y el sistema de control tienen una influencia importante en la seguridad global y la funcionalidad del sistema completo. Con la tecnología de microprocesadores actuales es posible integrar el control de la turbina con el sistema de mando, una combinación que no se ha hecho incluso en la década de Después de discutir la electrónica de control y se tiene en cuenta el diseño de sistemas de energía remota, centrándose en la evaluación de la energía producida y la estimación de las cargas a alimentar.
. Es necesario, sin embargo, al diseñar un sistema de energía a distancia para saber lo suficiente acerca de las ventajas y desventajas de cada tecnología renovable para hacer una elección inteligente de para su uso. Se describe con detalle la tecnología de los aerogeneradores pequeños. Esto se hace principalmente en comparación con las turbinas de gran tamaño. La Comisión Electrotécnica Internacional en sus normas de seguridad para pequeñas turbinas de viento, la CEI (2006), define una pequeña turbina de viento como aquel que presenta un área de rotor inferior a 200 m2 (diámetro de 16m), que corresponde a una potencia nominal de 50 kW o menos. Esto es aproximadamente el intervalo que se toma en cuenta. El generador de la turbina y el sistema de control tienen una influencia importante en la seguridad global y la funcionalidad del sistema completo. Con la tecnología de microprocesadores actuales es posible integrar el control de la turbina con el sistema de mando, una combinación que no se ha hecho incluso en la década de Después de discutir la electrónica de control y se tiene en cuenta el diseño de sistemas de energía remota, centrándose en la evaluación de la energía producida y la estimación de las cargas a alimentar.")
6
5.2 Sistemas Autónomos de Energía Eólica
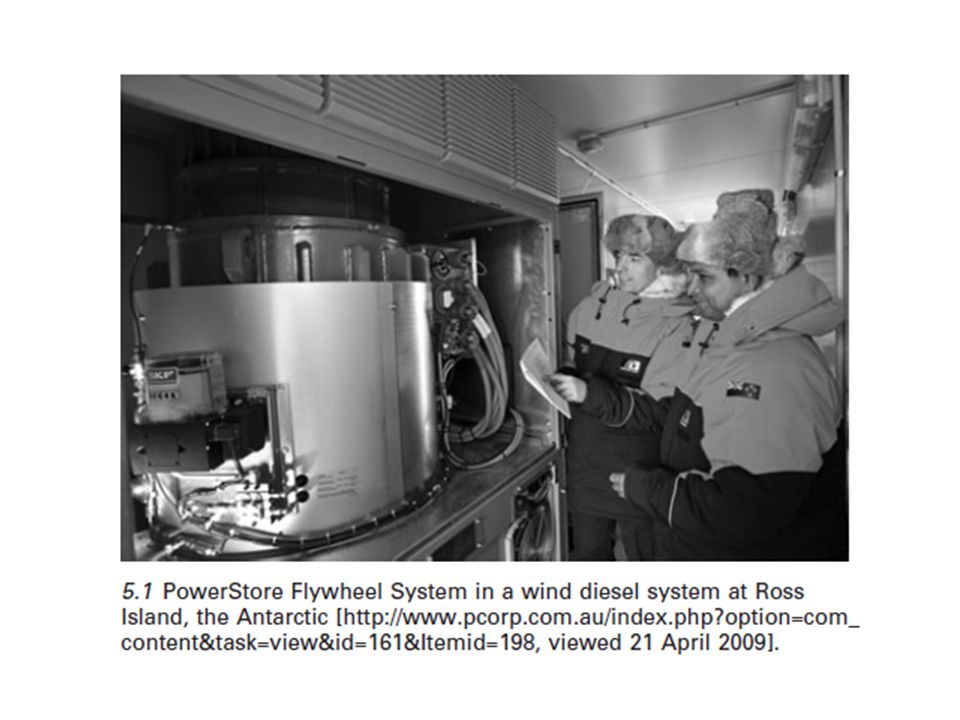
Los cambios de velocidad y la dirección del viento son generalmente demasiado grande para una turbina de viento para generar energía y abastecer directamente a una carga. Las únicas excepciones son las turbinas suministran una carga que requiere solamente una cantidad promedio de potencia de varios días, por ejemplo, como aplicaciones de bombeo de agua. En todas las demás circunstancias, el almacenamiento de energía u otra fuente de energía se requiere en combinación con la turbina eólica. En un sistema autónomo, el almacenamiento de energía más común son las baterías, pero también existe la posibilidad del uso de volantas (Fig. 5.1) y de almacenamiento térmico. El almacenamiento de energía mediante baterías es caro, pero puede reducirse mediante la adición de otras fuentes de energía tales como los sistemas fotovoltaicos o los generadores diesel. En ocasiones en los sistemas con generadores diesel no es necesario utilizar el almacenamiento de energía en absoluto, y la turbina eólica reduce el uso de combustible diesel.
 y de almacenamiento térmico. El almacenamiento de energía mediante baterías es caro, pero puede reducirse mediante la adición de otras fuentes de energía tales como los sistemas fotovoltaicos o los generadores diesel. En ocasiones en los sistemas con generadores diesel no es necesario utilizar el almacenamiento de energía en absoluto, y la turbina eólica reduce el uso de combustible diesel.")
8
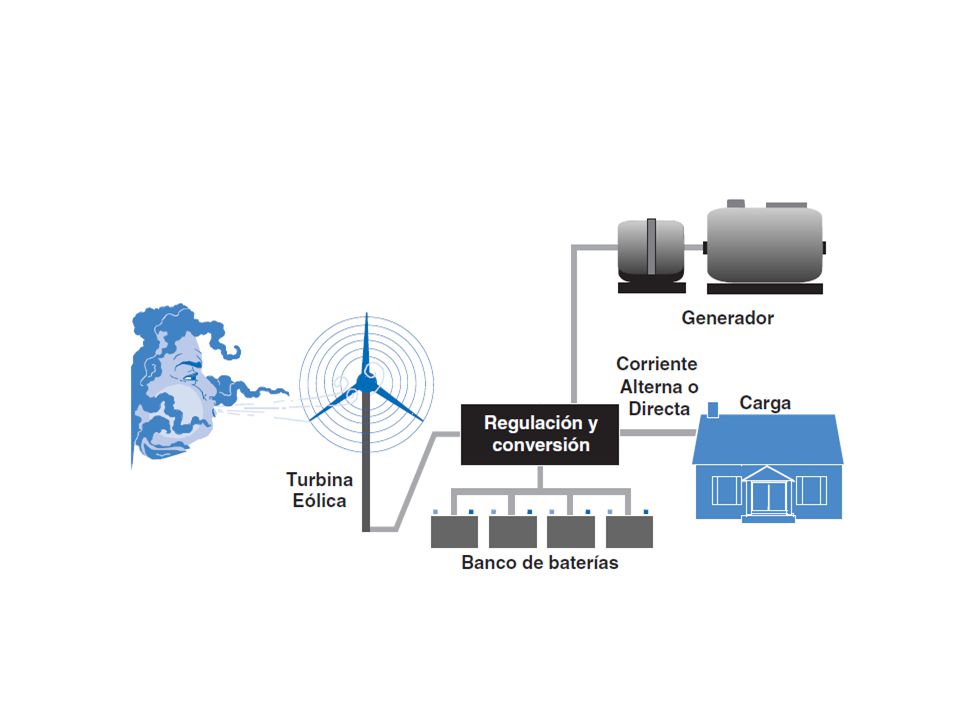
Para los sistemas autónomos, la elección de turbinas eólicas, sisetmas fotovoltaicos, o una combinación (Fig. 5.2) de estos, se relaciona directamente con el costo de producir la energía y almacenarla cuando no hay viento o la luz del sol. Esta simple regla puede tener resultados diferentes dependiendo del clima. Por ejemplo, cuando el viento y el recurso solar es bastante uniforme durante todo el año, como gran parte de la costa este de Australia, y luego la elección de la fuente de energía bien puede estar basada sólo en el precio. Por otro lado, zonas como Bengala Occidental y en partes de Bangladesh tienen los días tranquilos y soleados en "invierno" y los días ventosos y nublados durante el monzón y por lo tanto requieren de sistemas híbridos. Una comparación detallada de costos de los sistemas de energía activados por energía eólica solamente y sistemas con únicamente PV para las islas griegas, donde tanto los recursos son abundantes, se presentado por Kaldellis et al. (2007). La otra consideración importante es el entorno donde la energía se va a producir. Puede que no sea la instalación de aerogeneradores en algunas áreas urbanizadas, debido al ruido, la proximidad a edificios o personas, o bien por rutas migratorias de aves.

9
La fiabilidad puede ser otra consideración - todo lo que presenta movimiento mecánico va a necesitar más mantenimiento que los generadores estacionarios, como los fotovoltaicos. Los sistemas PV, sin embargo, no necesitan prácticamente mantenimiento ( la limpieza es algo evidente). Podar plantas y árboles con crecimiento muy alto para evitar el sombreado de los paneles es otra. La entrada de agua también puede ser un problema. Las turbinas de viento van a sufrir el desgaste de las piezas móviles y la fatiga de las piezas en función de su operación cíclica (por ejemplo, palas del rotor), pero los paneles fotovoltaicos van a sufrir la erosión por polvo y arena, y pueden sufrir de exceso de carga de viento debido a su gran área superficial. Paneles fotovoltaicos y torres de turbina eólicas con cables tensores son susceptibles a actos de vandalismo. Si la expansión gradual del sistema es una posibilidad futura, entonces el uso de PV debe ser considerado, ya que la capacidad eléctrica instalada puede ser gradualmente ampliada mediante la adición de unos paneles y más baterías y, posiblemente, otro inversor a la red. Para aumentar la producción de energía eólica, por lo general requiere la adición de otra turbina de viento dando un gran aumento en la producción de energía a un precio alto.

10
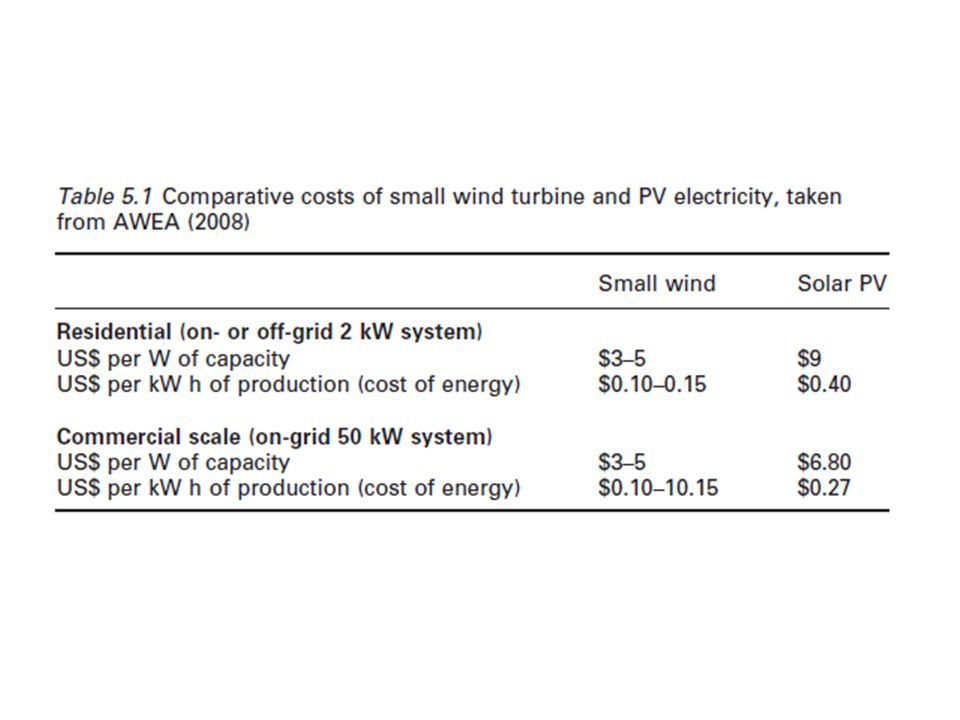
La capacidad total de generación de aerogeneradores de pequeña potencia que se vendió en USA en 2007 fue de 9,7 MW con un mercado de 42 millones de dólares (AWEA, 2008). Esto representa un costo promedio de $USD 4,33 por watt. El costo varía entre 3 y 5 $USD por watto y el costo por kW producción es de entre y 0.15 dólares. El mantenimiento de rutina es de alrededor de 0.01 a 0.05 $USD por kWh. Tabla 5.1 compara los costos típicos sistema eólicos y electricidad fotovoltaica. Como ya se ha visto los costos son dependientes del sitio donde se realizan los cálculo de costos. Este es muy sensible a la calidad de la fuente de energía y facilidad de instalación. Si el sitio presenta suficientemente viento, entonces es más barato instalar una turbina de viento que los paneles fotovoltaicos, pero si es necesario, los paneles fotovoltaicos por lo general se pueden añadir simplemente.

12
5.2.1 Análisis de prefatibilidad
Para determinar la sustentabilidad básica de un sistema eólico autónomo, es necesario disponer de estimaciones de la carga eléctrica y la fuente de alimentación. La carga existente o futura en kWh por día se puede estimar mediante la suma de los requerimientos de potencia en kW multiplicado por el número de horas por día que cada aparato se va a utilizar. Es entonces necesario estimar los kWh por día que será producido por la turbina. El sitio para la turbina de viento de un sistema de energía autónomo está determinado en gran medida por la ubicación de los usuarios, pero puede haber flexibilidad en la elección del sitio específico. Los emplazamientos de sistemas eólicos a muchos kilómetros de distancia para el suministro eléctrico no son útiles debido a las pérdidas adicionales en los largos cables eléctricos de transmisión de potencia o los costos incurridos en el uso de aumento en la generación (mayor número de turbinas) y el uso de transformadores reductores (en la carga). Los transformadores que permiten la transmisión a un voltaje más alto, lo que se reduce la corriente eléctrica y por lo tanto, las pérdidas de transmisión.
 y el uso de transformadores reductores (en la carga). Los transformadores que permiten la transmisión a un voltaje más alto, lo que se reduce la corriente eléctrica y por lo tanto, las pérdidas de transmisión.")
13
Sitios particularmente buenos a menudo se caracteriza por una vegetación inclina o ladeada en la dirección del viento predominante. Por ejemplo , el vuelo de una cometa o papalote, también dará una buena indicación de la ventosidad de la localidad. Sin embargo, la evidencia empírica de la ventosidad a menudo pueden ser distorsionada por la memoria de tormentas o fuertes vientos ocasionales a lo largo del año, en lugar de indicar una ventosidad en general. Se recomienda que la medición del viento debe llevarse a cabo si no hay datos disponibles de velocidad del viento, o bien instalar una pequeña turbina eólica para determinar si hay viento suficiente como para ser un sitio candidato en el desarrollo eólico en la localidad Para muchos sistemas pequeños y en los países en desarrollo, en particular, puede haber muy poca información sobre la velocidad del viento disponible.

14
barrilete, en Argentina, Uruguay, la costa norte de Colombia, El Salvador, Guatemala, Honduras, Nicaragua y México. chichigua, en República Dominicana. chiringa, en Puerto Rico. En Cuba designa a un papalote rústico de papel. cometa, en Colombia, Ecuador, Panamá, Perú, Nicaragua, Uruguay y Estado Táchira de Venezuela, a veces México y Chile. barrilete o zopilote, en Nicaragua. pandorga, en Paraguay, y zonas de las provincias de Chaco, Corrientes, Entre Ríos, Formosa, Misiones, Santa Fe y Santiago del Estero en el noreste y centro-norte de Argentina, en los departamentos de Salto, Soriano y Paysandú en el litoral uruguayo, y en los Estados brasileños de Santa Catarina y Río Grande del Sur, fronterizos con Argentina y Uruguay, respectivamente. papagayo, en Venezuela, y en los Estados de Campeche, Tabasco y Yucatán, sureste de México. Proviene del portugués papagaio, ‘cometa’, y originalmente del pájaro papagayo. papalote, en Costa Rica, Cuba y México. Proviene del náhuatl papálotl: ‘mariposa’. papelote, en Honduras; proviene del náhuatl papálotl: ‘mariposa’ y el español ‘papel’. petaca, en el Estado Zulia, noroeste de Venezuela. pizcucha, en El Salvador. zamura, en Venezuela. volador, en Bolivia y en los Estados Anzoátegui, Bolívar, Monagas, Nueva Esparta y Sucre, este y sur de Venezuela. volantín en Chile; departamentos de Cochabamba y Santa Cruz en el centro y este de Bolivia ; provincias de Mendoza, San Juan y Tucumán, oeste y noroeste de Argentina ; Estados Falcón, Trujillo y Zulia, noroeste de Venezuela y municipios de Aguadilla y Mayagüez, oeste de Puerto Rico. pipa, papagaio, arraia en Brasil.

15
Identificación preliminar del área
Este proceso se defiende una región relativamente grande. El recurso eólico disponible se puede inferir basado en la información de estaciones anemométricas de aeropuertos, topografía, vegetación, y otros indicadores. Representación de la escala basada en la forma de la copa de los árboles y el grado de doblez de las ramitas, de las ramas, y del tronco. La clase VII es daño mecánico puro.

16
Evaluación del recurso del viento del área
Esta etapa se aplica a la medida del viento para caracterizar el recurso en un área donde se está considerando el desarrollo eólico. Los objetivos más comunes de esta escala son: • Determinar o verificar si existe suficiente recurso eólico dentro del área para justificar futuras investigaciones específicas en el sitio • Comparar las mediciones de las áreas para distinguir el potencial eólico de cada área • Obtener datos representativos para estimar el funcionamiento y la viabilidad técnico- económica para un emplazamiento de tecnología eólica • Referente para los sitios potenciales de la instalación de turbinas eólicas Micrositing La escala más pequeña, o la tercera etapa, es la evaluación de micrositing. Su objetivo principal es cuantificar la variabilidad del recurso eólico en una escala pequeña sobre el terreno de interés. Los datos de micrositing se utilizan para determinar la colocación de dos o más turbinas eólicas lo más cerca posible para maximizar el área de tierra disponible y que su colocación ofrezca el máximo desempeño en la utilización del recurso eólico.

17
Planeación para la medición
El campo común a todos los programas de monitoreo es la necesidad de una planeación de las mediciones. Su propósito es asegurarse de que todas las facetas del programa de monitoreo del viento sean correctas y puedan proporcionar los datos que se necesitan para establecer el tipo de tecnología utilizada en la conversión de la energía eólica. Por lo tanto, los objetivos del uso de la energía eólica deben dictar el diseño del plan para las mediciones y debe especificar las características siguientes: Parámetros de medición Tipo de equipo, calidad, y costo Número y localización de las estaciones de monitoreo Alturas de la medida del sensor Exactitud de la medida, duración y recuperación de los datos Intervalos del muestreo y de la grabación de los datos Formato del almacenaje de datos Manipulación de datos y su procesado Medidas del control de calidad Formato de los informes de los datos.

18
Estrategia de monitoreo
La manera cómo se realiza la planificación de mediciones es la base para la estrategia de monitoreo. La estrategia debe incluir una gestión adecuada, personal calificado, y recursos adecuados. Cada uno de los participantes debe entender sus propios quehaceres y responsabilidades y las de los demás, así como la línea de comando de autoridad y de responsabilidad. Cada uno debe conocer los objetivos del programa, la planificación de la medición y el tiempo o periodo de ejecución del proyecto. Debido a las complejidades del proyecto, el equipo debe incluir por lo menos a una persona con experiencia en la mediciones en campo. El análisis de datos, la interpretación y las habilidades computacionales son también habilidades que son necesarias. Los recursos humanos y materiales disponibles deben ser conmensurados con los objetivos de programa. Se deben considerar los mayores niveles de exactitud y cuidar que los datos medidos estén completos y mantener respaldos de los datos crudos. Debe considerarse la supervisión constante como visitas rutinarias a los sitio de medición y la revisión oportuna de los datos.

19
La calidad de los datos se mide generalmente en términos de su representatividad, la exactitud, y la completes. Los componentes del plan de medición deben incluir el siguiente: • Consecución del equipo relacionada con las especificaciones de programa • Método, frecuencia, e información de la calibración del equipo • Listas de comprobación de la instalación de la estación de supervisión y de operación y del mantenimiento • Formas de la colección y de la recuperación de datos • Pautas del análisis de datos (cálculos, etc.) • Métodos de la validación de datos y formato de información • Intervenciones internas para documentar la instalación, funcionamiento, operación y mantenimiento, así como la adquisición y la manipulación de datos. Otra meta de garantizar la calidad es reducir al mínimo las incertidumbres que entran inevitablemente en cada paso del plan de medición. Ningún sitio describe y representa perfectamente el área entera, ningún sensor mide perfectamente, y ni todos los datos recopilados durante un período extenso reflejan perfectamente todas las condiciones del viento que en el futuro una central eólica experimentará durante su vida útil de 30 años. Sin embargo, si la magnitud de las incertidumbres se entiende y se controlan, las conclusiones se pueden calificar como correctas y son capaces de proporcionar información muy útil.
 • Métodos de la validación de datos y formato de información. • Intervenciones internas para documentar la instalación, funcionamiento, operación y mantenimiento, así como la adquisición y la manipulación de datos. Otra meta de garantizar la calidad es reducir al mínimo las incertidumbres que entran inevitablemente en cada paso del plan de medición. Ningún sitio describe y representa perfectamente el área entera, ningún sensor mide perfectamente, y ni todos los datos recopilados durante un período extenso reflejan perfectamente todas las condiciones del viento que en el futuro una central eólica experimentará durante su vida útil de 30 años. Sin embargo, si la magnitud de las incertidumbres se entiende y se controlan, las conclusiones se pueden calificar como correctas y son capaces de proporcionar información muy útil.")
20
Las estimaciones del recurso eólico se expresan en clases de densidad de potencia eólica y se utilizan desde la clase 1 a la clase 7. Cada clase represa una gama de densidad de potencia eólica o su equivalente de la velocidad media a una altura específica sobre el nivel de tierra. Los recuadros señalados como clase 4 o mayor se consideran generalmente como los más convenientes para el usos de la mayoría de las turbinas eólicas. La áreas con clase 3 son convenientes para el desarrollo de energía eólica al usar turbinas altas con 50 m de la altura al eje del rotor. La clase 2 es marginal y la clase 1 es inadecuada para la aplicación de la energía eólica.

21
Dos recomendaciones importantes se deben tomar en cuenta al elegir la localización de la torre de medición anemométrica: • Colocar la torre tan lejanos como sea posible de obstrucciones locales al viento • Seleccionar una localización que sea representativa del sitio.

22
También se debe tomar en cuenta: la dirección del viento, el tipo de terreno, las características de la vegetación y aplicar las directrices del emplazamiento de la torre de medición anemométrica.

23
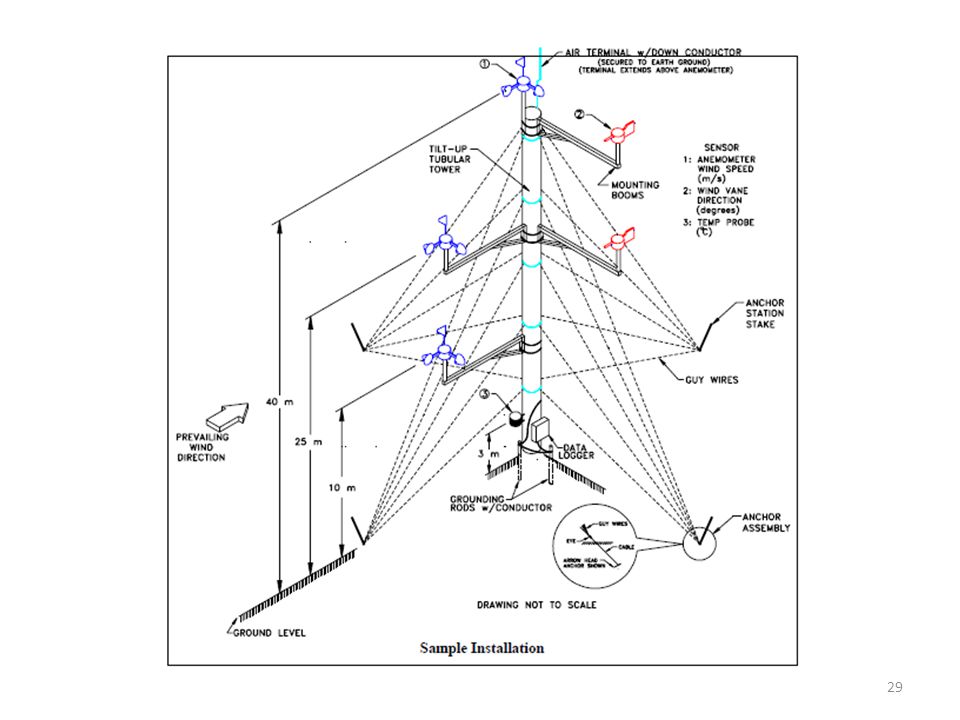
Instalación de la torre
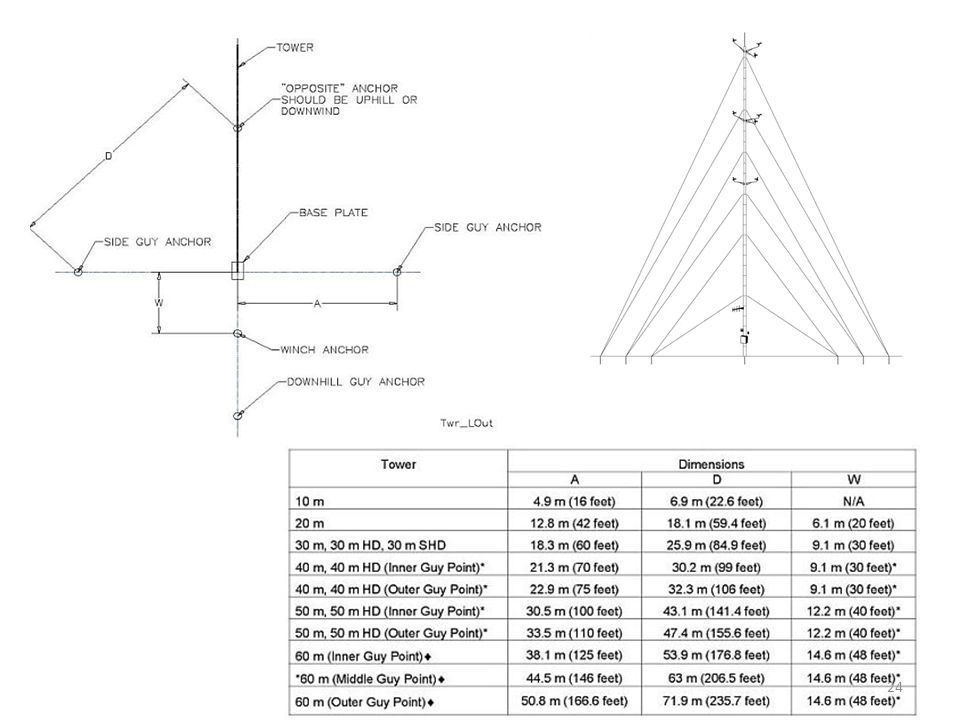
La torre se debe instalar bajo consideraciones estrictas de seguridad y con facilidad en la instalación. Las torres se pueden levantar casi dondequiera, pero la tarea es mucho más fácil si el terreno es relativamente plano y libre de árboles. Si la torre se erige en una cuesta o un terreno desigual, los alambres tensores o vientos se pueden ajustar mientras que se levanta la torre. Para una torre de 40 m, el radio de la posición de las anclas debe ser al menos 20 m. Se deben considerar al menos tres anclas, pero es común utilizar cuatro puntos de anclaje evitando que alguno de los alambres tensores esté en la dirección del viento predominante. Es recomendable erigir la torre levantándola a lo largo de la dirección del viento.

25
Instalación de los sensores de medición y del equipo periférico
Los sensores de medición se deben montar sobre la torre asegurando que se minimice cualquier influencia causada por la torre, los mismo equipos de medición y los equipos periféricos. Sensores de la velocidad y de la dirección del viento • Montar el sensor superior por lo menos 0.3 m (1 pie) sobre la punta de la torre para reducir al mínimo efectos potenciales del sombreado eólico de la torre • Colocar los sensores en monturas independientes. Los sensores se deben colocar lejos de la estructura de la torre y horizontales al terreno. Si la torre es de elementos estructurales tipo celosía o de armadura el sensor se debe colocar por lo menos a tres anchuras de la torre y seis diámetros de la torre si la torre es tubular (Para las torres de estructura triangulares, se mide la anchura de la torre como la longitud de una de las caras) • Orientar los sensores montados del lado de la torre en la dirección del viento predominante, o, si hay más de una dirección que prevalece, en una dirección que reduzca al mínimo la probabilidad de los efectos de sombra de la torre y por el mismo sensor • Los sensores se deben montar de manera horizontal con una altura igual por lo menos a ocho diámetros del brazo de soporte de montaje. Para brazos de soporte cuadrados, el diámetro es igual a la longitud de uno de los lados. • Se debe prever el drenado de los sensores por lluvia o por deshielo (el congelamiento del agua que puede reventar y causar daños)
 sobre la punta de la torre para reducir al mínimo efectos potenciales del sombreado eólico de la torre. • Colocar los sensores en monturas independientes. Los sensores se deben colocar lejos de la estructura de la torre y horizontales al terreno. Si la torre es de elementos estructurales tipo celosía o de armadura el sensor se debe colocar por lo menos a tres anchuras de la torre y seis diámetros de la torre si la torre es tubular (Para las torres de estructura triangulares, se mide la anchura de la torre como la longitud de una de las caras) • Orientar los sensores montados del lado de la torre en la dirección del viento predominante, o, si hay más de una dirección que prevalece, en una dirección que reduzca al mínimo la probabilidad de los efectos de sombra de la torre y por el mismo sensor. • Los sensores se deben montar de manera horizontal con una altura igual por lo menos a ocho diámetros del brazo de soporte de montaje. Para brazos de soporte cuadrados, el diámetro es igual a la longitud de uno de los lados. • Se debe prever el drenado de los sensores por lluvia o por deshielo (el congelamiento del agua que puede reventar y causar daños)")
26
• La veleta que indica la dirección del viento debe ser orientada así que su posición del punto muerto y no estar dirigida hacia el viento predominante. Es práctica común que el punto muerto de la veleta coincida con el norte geográfico y se marque como 0°. La orientación del punto muerto se debe documentar para que se conozca la referencia de los datos y el software de análisis ocupe dirección del viento correcta. • Se debe verificar la posición del punto muerto de la veleta de viento una vez que se levanta la torre.

27
Sensor de temperatura, presión y humedad
• Montar el sensor de temperatura blindado o encasquillado por lo menos a una distancia de 1 diámetro de la torre (lejos de la cara de la torre para reducir al mínimo efectos térmicos de la torre) • Orientar el sensor de temperatura en la torre que permita la exposición máxima a la dirección del viento predominante para asegurar una ventilación adecuada. • Se pueden incluir sensores de presión atmosférica y de humedad con la finalidad de obtener información que permita calcular la densidad del aire. • También es conveniente incluir medidores de precipitación (pluvímetro) en las inmediaciones de la torre.
 • Orientar el sensor de temperatura en la torre que permita la exposición máxima a la dirección del viento predominante para asegurar una ventilación adecuada. • Se pueden incluir sensores de presión atmosférica y de humedad con la finalidad de obtener información que permita calcular la densidad del aire. • También es conveniente incluir medidores de precipitación (pluvímetro) en las inmediaciones de la torre.")
28
Adquisidor de datos y hardware asociado
• Colocar el sistema de adquisición de datos, así como conexiones y cableado, equipo de telecomunicación, entre otros, en un recito cerrado a prueba de mal tiempo y bajo llave •Poner paquetes desecantes en el recinto del sistema de adquisición de datos para absorber la humedad • Montar el recinto a una altura de la torre tomando en cuenta la profundidad media de la nieve y para disuadir el vandalismo • Si fuera aplicable, colocar el panel solar de alimentación de las baterias sobre el recinto para sombrearlo. El panel solar deberá tener su inclinación para máximizar su funcionamiento durante el invierno • Sellar todas las aberturas en el recinto para prevenir daño por precipitación, insectos y roedores • Si fuera aplicable, orientar la antena de la comunicación celular a una altura fácilmente accesible.

30
Sistema de tierra • Investigar la incidencia de la actividad de relámpagos y determinar la capacidad del sistema tierra. • Proteger el sistema de adquisición datos • Instalar un pararrayos aterrizado • Asegurarse de que el conductor desnudo cobre es calibre ≤10 • Asegurarse de que la barra que pone a tierra esté libre de capas no conductoras, tales como pintura o esmalte • Utilizar por lo menos una barra a tierra con 12.5 cm de diámetro y 2.4 m de largo para proporcionar el área mínima de la superficie de contacto del suelo • Alambrar todas las barras a tierra juntas para proporcionar continuidad eléctrica • Enterrar todas las barras a tierra. Si se encuentra una roca, conducir la barra con un ángulo 45°, o enterrarla profundamente en un foso por lo menos 0.6 m • Utilizar un sistema a tierra monopunto • Determinar el tipo del suelo y clasificar su resistencia. Generalmente entre más baja la resistencia mejor es la conexión a tierra • Asegurarse de que la resistencia entre el sistema a tierra y la tierra física sea menor que 100 ohmios • Aplicar un agente anti-oxidación a todas las tomas de tierra

31
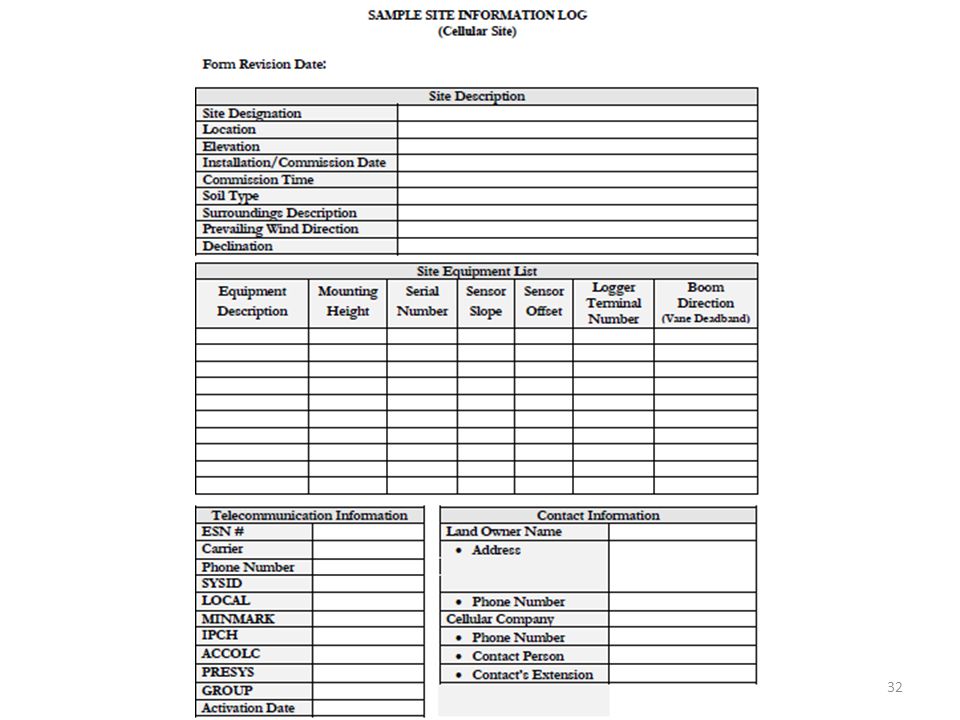
Documentación Se debe integrar un detallado y completo expediente de todas las características del sitio, fechas de instalación y supervisión, fichas de calibración y descripción de los sensores y toda aquella información relevante debe incluirse. • Descripción del sitio: Incluir una clave única para la identificación del sitio e incluir un mapa geo-referenciado del lugar de instalación de las torres anemométricas. Se debe incluir las fechas de instalación y supervisiones. Las coordenadas del sitio se deben expresar con una exactitud de al menos de 0.1 minuto (por lo menos 100 m) en latitud y longitud y por lo menos en 10 m en la elevación. • Lista del equipo del sitio: Para todo el equipo (sistema de adquisición de datos, sensores, y periféricos), documentación del fabricante, el modelo, los números de serie y las fichas de certificación de calibración. • Información de la telecomunicación: Incluir toda la información programada del teléfono móvil. • Información de contacto: Incluir toda la información de contacto pertinente
 en latitud y longitud y por lo menos en 10 m en la elevación. • Lista del equipo del sitio: Para todo el equipo (sistema de adquisición de datos, sensores, y periféricos), documentación del fabricante, el modelo, los números de serie y las fichas de certificación de calibración. • Información de la telecomunicación: Incluir toda la información programada del teléfono móvil. • Información de contacto: Incluir toda la información de contacto pertinente.")
33
5.2.2 Modelado y simulación de sistemas autónomos de energía eólica
Los fabricantes de turbinas eólicas grandes a menudo proporcionan una curva de potencia en comparación en función de la velocidad del viento. Algunos fabricantes de pequeñas turbinas sólo proporcionan la velocidad del viento a la cual la turbina opera a potencia nominal, en cuyo caso es necesario utilizar una curva aproximada de una turbina similar. El promedio de la velocidad del viento cada diez minutos se combinan con la curva de potencia de un aerogenerador para determinar la producción de energía del sistema durante el período que abarca los promedios. Un programa de hoja de cálculo puede ser escrito para realizar esta tarea. Si una curva de Weibull para la distribución de probabilidad de la velocidad del viento de 10 minutos en la zona es aplicable, o puede suponerse, entonces se puede utilizar junto con la velocidad media del viento para determinar la producción de energía en kWh por día durante el período. El Consejo de Investigación Nacional de Canadá sitio web RETScreen ( dispone de un software descargable gratuito para determinar la producción promedio de energía como se describió anteriormente, junto con una gran base de datos de los datos de velocidad del viento de todo el mundo, y el curvas de potencia para una serie de pequeñas turbinas de viento.

34
5.3 Tecnología de pequeñas de turbinas de viento
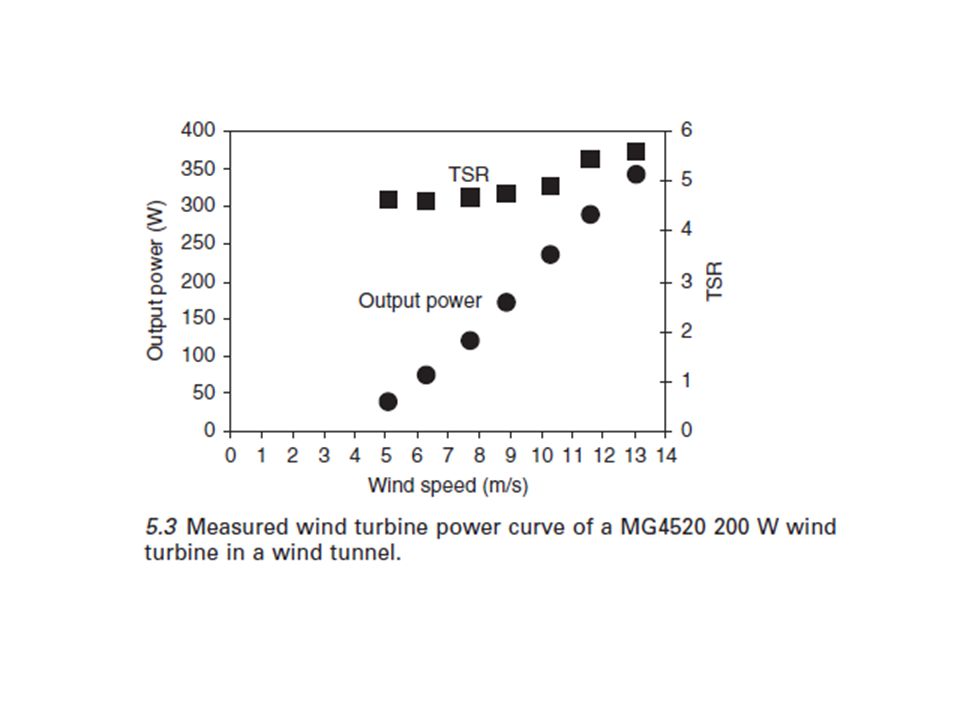
En esta sección se describen los componentes básicos de las pequeñas turbinas de viento sobre todo en contraste con los de las turbinas más grandes. Sin embargo, hay aspectos de funcionamiento de la turbina que son comunes a las turbinas de todos los tamaños. El parámetro principal de operaciones es la relación entre la velocidad punta, TSR, que se define como la velocidad circunferencial de las puntas de la pala dividida por la velocidad del viento. El TSR controla la aerodinámica de la pala, en particular, el ángulo de ataque de la flujo de aire sobre las palas. Esto, a su vez, establece el ascensor: relación de arrastre y por tanto la potencia de salida (Burton et al, 2001.). La mayoría de las turbinas operan con un TSR entre 5 y 10, con valores más bajos para tres o más palas y los valores más altos para dos palas. Generalmente es preferible operar a TSR constante como la velocidad del viento varía, que es el comportamiento aproximado de los datos de la turbina de la figura. 5,3, e idealmente, que la TSR da una óptima potencia y eficiencia. Puede ser un reto el problema de control para mantener el TSR óptimo con la variación de la velocidad del viento si no se cuenta con un anemómetro.
. La mayoría de las turbinas operan con un TSR entre 5 y 10, con valores más bajos para tres o más palas y los valores más altos para dos palas. Generalmente es preferible operar a TSR constante como la velocidad del viento varía, que es el comportamiento aproximado de los datos de la turbina de la figura. 5,3, e idealmente, que la TSR da una óptima potencia y eficiencia. Puede ser un reto el problema de control para mantener el TSR óptimo con la variación de la velocidad del viento si no se cuenta con un anemómetro.")
37
5.3.1 El generador El generador ideal de turbina eólica debería comenzar a producir potencia tan pronto como el viento sopla, y su potencia de salida se incrementaría con el aumento en la velocidad del viento. Si la salida del generador está en cortocircuito, el generador siempre disminuye la velocidad de la turbina a un alto sin dañar el generador. Por último, el generador ideal debe ser controlable de modo que proporciona 'seguimiento del punto de máxima potencia', MPPT, permitiendo la máxima extracción de energía.

38
Velocidad del generador y velocidad del viento
En la práctica, un generador siempre tendrá una velocidad mínima antes de producir suficiente voltaje para alimentar de energía a una carga, tal como una batería o una red eléctrica. Tratar de reducir la velocidad a la que el generador puede operar rápidamente pierde su valor, como en bajas velocidades de viento, de cualquier forma hay poca energía a velocidades bajas de viento (Fig. 5.3). Cuando el generador aumenta la velocidad, su voltaje de salida se incrementará y se alimenta energía adicional en la carga. Sin embargo, rara vez se ajustan automáticamente los óptimos de potencia / velocidad características del rotor con el fin de extraer la máxima cantidad de energía procedente de las palas y el viento. En general, por razones de estabilidad, una turbina de viento y su generador serán diseñado de modo que su velocidad es mayor que la velocidad óptima, reduciendo así la probabilidad de que se detenga.
. Cuando el generador aumenta la velocidad, su voltaje de salida se incrementará y se alimenta energía adicional en la carga. Sin embargo, rara vez se ajustan automáticamente los óptimos de potencia / velocidad características del rotor con el fin de extraer la máxima cantidad de energía procedente de las palas y el viento. En general, por razones de estabilidad, una turbina de viento y su generador serán diseñado de modo que su velocidad es mayor que la velocidad óptima, reduciendo así la probabilidad de que se detenga.")
39
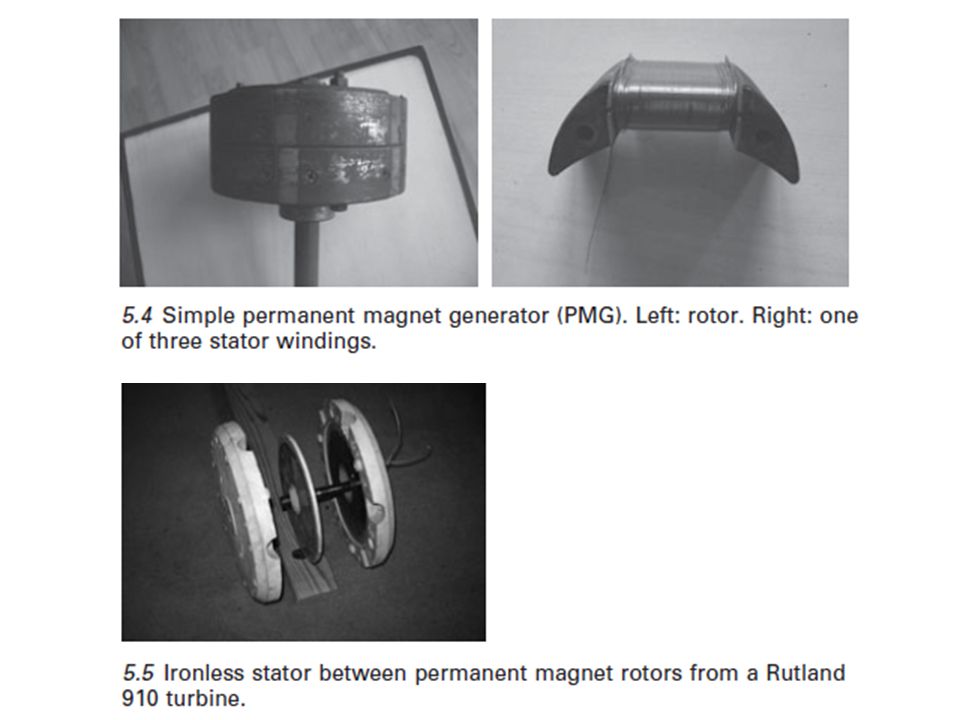
Tipos de generadores Las turbinas eólicas peqeñas (por lo general menores de 5 kW) utilizan generadores de imanes permanentes, PMG las figuras 5.4 y 5.5. Tienen la ventaja de no requerir excitación externa. PMG son los más sencillos de usar ya que sólo necesitan un rectificador para producir una corriente directa (DC) para una batería, pero los imanes son frágiles y muchos de ellos son sensibles a la temperatura. Los generadores síncronos (como alternadores de automóviles) son similares a los PMG, pero necesitan un campo de corriente para producir el campo magnético, por lo que son intrínsecamente menos eficientes. Además, en bajas velocidades del viento, la energía del viento puede no ser suficiente para proporcionar corriente al devanado de campo. No obstante, es posible obtener un rendimiento satisfactorio de estos generadores si están conectados a través de un rectificador a las baterías. Sin embargo, si están conectados a una carga de CA con una frecuencia constante, la velocidad de la turbina debe mantenerse constante y el de eficiencia se ve comprometida a menos que un rectificador y un l inversor se añadan.
 utilizan generadores de imanes permanentes, PMG las figuras 5.4 y 5.5. Tienen la ventaja de no requerir excitación externa. PMG son los más sencillos de usar ya que sólo necesitan un rectificador para producir una corriente directa (DC) para una batería, pero los imanes son frágiles y muchos de ellos son sensibles a la temperatura. Los generadores síncronos (como alternadores de automóviles) son similares a los PMG, pero necesitan un campo de corriente para producir el campo magnético, por lo que son intrínsecamente menos eficientes. Además, en bajas velocidades del viento, la energía del viento puede no ser suficiente para proporcionar corriente al devanado de campo. No obstante, es posible obtener un rendimiento satisfactorio de estos generadores si están conectados a través de un rectificador a las baterías. Sin embargo, si están conectados a una carga de CA con una frecuencia constante, la velocidad de la turbina debe mantenerse constante y el de eficiencia se ve comprometida a menos que un rectificador y un l inversor se añadan.")
41
Tanto los generadores de jaula de ardilla, y generadores de inducción doblemente excitados son generadores de corriente alterna. Pueden, con un controlador adecuado, cargar las baterías. Los generadores auto-excitados reducen su eficiencia, pero el generador de inducción de jaula de ardilla, en particular, es muy robusto. Sin embargo, la potencia de salida de ambos generadores es generalmente muy sensible tanto a la velocidad del generador y el nivel de carga. Por lo tanto requieren un controlador sofisticado para mantener la tensión y la potencia de salida dentro de límites útiles. Los generadores de inducción de jaula de ardilla no tienen escobillas, pero a menudo requieren una caja de cambios ya que a menudo giran demasiado rápido para que coincida con el TSR óptimo del rotor. Generadores de tres de fase normalmente se prefieren a los generadores monofásicos, ya que son más pequeños y baratos por lo general para la misma potencia de salida. Todos los generadores mencionados anteriormente producen corriente alterna, CA. Es posible obtener generadores de corriente continua, sino que utiliza un conmutador y las escobillas y requieren un mantenimiento regular de las escobillas y el conmutador, por lo tanto, generalmente no son adecuados para pequeñas turbinas de viento. Otros tipos de generadores suelen ser demasiado especializados y costosos para las pequeñas turbinas, aunque esto puede cambiar a medida que las tecnologías de diferentes fabricantes de generadores y su entrada en el mercado.

42
La fricción y el par de arranque
Algunos generadores necesitan un par positivo para conseguir girar y puede haber momento adicional en el tren de transmisión, sobre todo si se utiliza una caja de cambios. Por alguna razón, una turbina que no gira cuando el viento está soplando sugiere un diseño defectuoso o daño en el sistema tren motriz. Incluso si la turbina está girando, no se puede generar suficiente voltaje para alimentar una batería o suministro de CA. El par resistente puede ser causada por: • Rodamientos de alta fricción (rodamientos sellados); • Fricción de pincel; • Alto par de arranque, especialmente en los generadores de imanes permanentes; • Los sellos para aceite entre el generador y la caja de cambios.
; • Fricción de pincel; • Alto par de arranque, especialmente en los generadores de imanes permanentes; • Los sellos para aceite entre el generador y la caja de cambios.")
43
Como se señaló anteriormente, los PMG se prefieren para las turbinas pequeñas, ya que no necesitan reductores y no tienen escobillas. Dependiendo del diseño, pueden tener significativo par de arranque, que si bien no es inevitable, con un diseño sofisticado se puede reducir al mínimo. Una técnica para eliminar par de arranque es utilizar un rotor sin hierro o estator. A menudo esto implica devanados del generador embebidos en resina, con ningún camino de hierro para el flujo magnético a través del rotor. Esto ciertamente elimina el par de arranque, pero reduce la flujo magnético y puede conducir a un recalentamiento de los bobinados, como gran parte de su disipación del calor es ahora a través de la resina.

44
5.3.2 Otras características de las pequeñas turbinas
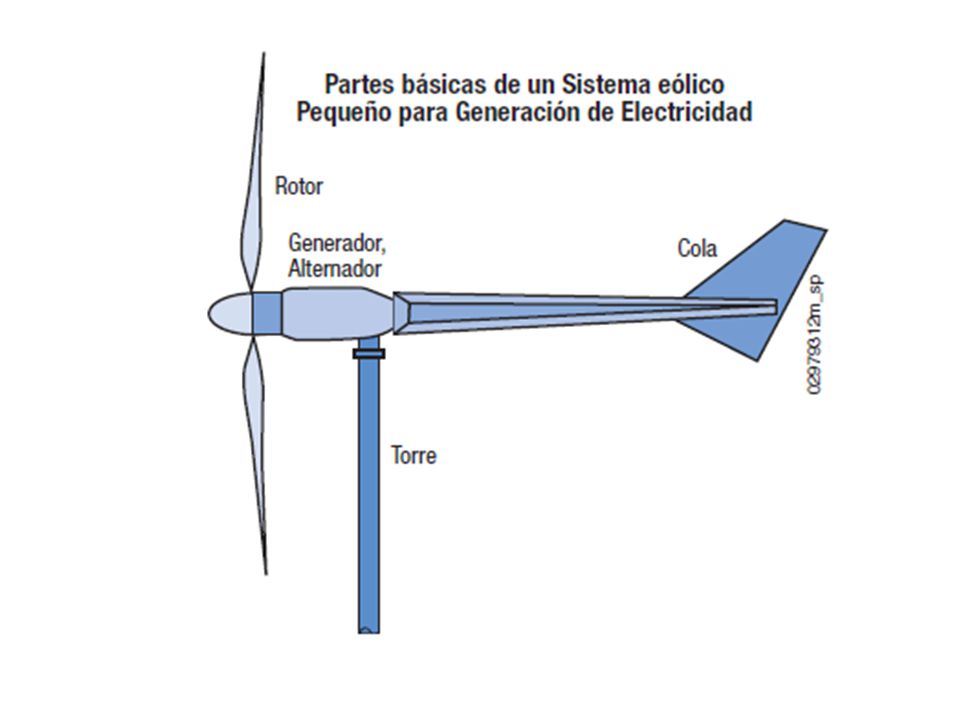
En comparación con las turbinas grandes y las pequeñas turbinas por lo general: • operan a altas velocidades de rotación con la misma velocidad del viento; • tienen una aleta de cola para orientarlos hacia el viento • tienen alturas pequeñas para las torres y presentan una velocidad media del viento inferior • emplear de sistemas de seguridad más sencillos y baratos que pueden comprometer su capacidad para resistir los fuertes vientos. Una mayor velocidad de rotación significa una mayor frecuencia máxima de rotación de la pala y una mayor oportunidad para que la torre experimente frecuencias de resonancias y un mayor número de ciclos de fatiga de las palas por unidad de tiempo. Las palas también experimentan mayores cargas centrífugas ya que estos dependen del producto de la radio de la punta y el cuadrado de la velocidad de rotación.

45
Aletas de la cola y el comportamiento de guiñada
Las pequeñas turbinas normalmente o bien tienen una aleta de colar, o el rotor se coloca a favor del viento de la torre y la conicidad de las palas proporciona la estabilidad de guiñada. A menudo se dice que los rotores viento abajo no se desempeñan bien, pero no hay estudios detallados de su comportamiento. Sin embargo, puede haber ruido y otros problemas asociados con las interacciones de la torre en las máquinas a favor del viento. El comportamiento de un dispositivo de “guiñada libre” para rotores contra el viento es aproximadamente la de un sistema lineal de segundo orden, (Bechly et al. (2002), y esto puede conducir a tasas de guiñada y los grandes momentos giroscópicos en la raíz de la pala y el eje principal. Estas cargas son proporcionales al producto de la inercia de la pala, la velocidad angular y la velocidad de guiñada, y pueden ser las mayores cargas en una pequeña turbina de acuerdo con el "modelo de carga simple" de la IEC (2006), véase Wood (2009). Especial cuidado se necesita en el diseño del eje principal y por lo general es necesario utilizar un acero de alto grado con una alta resistencia a la rotura.
, y esto puede conducir a tasas de guiñada y los grandes momentos giroscópicos en la raíz de la pala y el eje principal. Estas cargas son proporcionales al producto de la inercia de la pala, la velocidad angular y la velocidad de guiñada, y pueden ser las mayores cargas en una pequeña turbina de acuerdo con el modelo de carga simple de la IEC (2006), véase Wood (2009). Especial cuidado se necesita en el diseño del eje principal y por lo general es necesario utilizar un acero de alto grado con una alta resistencia a la rotura.")
46
Torres Las torres de las turbinas pequeñas varían desde soportes tubulares con cables tensores (vientos) y torres de celosía utilizadas para grandes aerogeneradores. Muchas torres se abaten y se levantaba con un mástil, el cable y un cabrestante manual. Con el fin de obtener la aprobación de desarrollo para la instalación de una turbina, se debe considerar que la turbina y la torre están diseñados para soportar la velocidad máxima del viento para el sitio. Esta velocidad se da generalmente en la norma nacional correspondiente de las cargas de viento El nivel de importancia de erigir una turbina puede variar entre una comunidad y un sitio urbano. En Australia, por ejemplo, la velocidad máxima del viento no varía mucho, además de ser significativamente mayor en las zonas susceptibles a los ciclones (el equivalente del hemisferio sur de los huracanes y tifones). Sin embargo, los ciclones y como tales son predecibles, y una protección aceptable contra ellos es bajar la turbina antes de su vencimiento.
 y torres de celosía utilizadas para grandes aerogeneradores. Muchas torres se abaten y se levantaba con un mástil, el cable y un cabrestante manual. Con el fin de obtener la aprobación de desarrollo para la instalación de una turbina, se debe considerar que la turbina y la torre están diseñados para soportar la velocidad máxima del viento para el sitio. Esta velocidad se da generalmente en la norma nacional correspondiente de las cargas de viento. El nivel de importancia de erigir una turbina puede variar entre una comunidad y un sitio urbano. En Australia, por ejemplo, la velocidad máxima del viento no varía mucho, además de ser significativamente mayor en las zonas susceptibles a los ciclones (el equivalente del hemisferio sur de los huracanes y tifones). Sin embargo, los ciclones y como tales son predecibles, y una protección aceptable contra ellos es bajar la turbina antes de su vencimiento.")
47
Las torres con tensores son los más comunes, probablemente debido al bajo precio de compra y el espacio tomado por el tipo de cables no es a menudo un problema para las instalaciones remotas. Por otro lado, los cables tensores a menudo deben ser fuertes para resistir el momento de vuelco de la turbina sobre la base de la torre y pueden requerir grandes zapatas, que pueden ser costosas y un problema de transporte para los sitios remotos. Las torres de celosía son más fáciles de transportar por su , pero tienden a tener una vida útil menor que las torres de poste. Las torres tubulares requieren una base más pequeña, pero son generalmente más pesados que los otros tipos y por lo tanto más caros para comprar y transportar. Torres de acero galvanizado en caliente por inmersión por lo general tienen la mayor vida útil, y esto puede ser una consideración importante si la turbina está situado cerca del océano. La frecuencia natural de la torre es importante por dos razones principales. El primer caso es que muchas de las normas nacionales requieren un "análisis dinámico" de la seguridad de la torre, si la frecuencia natural es menos que, por ejemplo, de 1 Hz. En segundo lugar, si esta frecuencia está comprendida en el rango de frecuencias de la pala, la resonancia de la torre de es posible. Debido a la amplia gama de frecuencias de operación de la pala es muy difícil evitar esta situación. Por otro lado, las frecuencias de la pala varían con la velocidad del viento por lo que las oportunidades para la creación de resonancia son limitadas.

48
La altura de la torre óptima para una pequeña turbina, definida como la que tiene el máximo salida de potencia por unidad de costo de capital es típicamente m dependiendo del tamaño de la turbina y el régimen de viento (Wood, 2001). Parte de la razón de estas bajas alturas es que las turbinas pequeñas son generalmente diseñadas (para una potencia máxima) con velocidades de viento inferiores, entre 10 y 15 m / s, que las turbinas de gran tamaño y por lo que el aumento de la velocidad del viento a medida que aumenta la altura hace que la potencia de salida sea limitada y, la turbina sea frenada en periodo de tiempo mayor.
 con velocidades de viento inferiores, entre 10 y 15 m / s, que las turbinas de gran tamaño y por lo que el aumento de la velocidad del viento a medida que aumenta la altura hace que la potencia de salida sea limitada y, la turbina sea frenada en periodo de tiempo mayor..")
49
Puesta en marcha y el comportamiento de baja velocidad del viento
El bajo rendimiento de una turbina eólica suele medirse por el cut-in wind speed, pero Wright y Wood (2004) documentó el hecho bien conocido que la velocidad del viento ‘de inicio' para las palas inicialmente en reposo puede ser mucho mayor que la velocidad del viento ‘de parada' en la que las palas llegan al reposo. Para una turbina de 500 W con un PMG, que tiene un par de arranque de 0,36 Nm, la primera fue de alrededor de 4,5 m/s y la posterior de 2,5 m/s, dando un cut-in wind de 3,5 m/s, lo que parece respetable pero significa que la turbina no puede ser utilizada para la producción de energía a la velocidad media del viento de muchos sitios! La alta velocidad para el arranque del aerogenerador es desafortunada, pero comprensible, ya que rara vez las pequeñas turbinas utilizan ajuste en el ángulo de paso (pitch control) - otra gran diferencia con las grandes turbinas - lo que significa que los ángulos típicos de ataque en las palas fijas son muy altas, y el par aerodinámico resultante es bajo.
 documentó el hecho bien conocido que la velocidad del viento ‘de inicio para las palas inicialmente en reposo puede ser mucho mayor que la velocidad del viento ‘de parada en la que las palas llegan al reposo. Para una turbina de 500 W con un PMG, que tiene un par de arranque de 0,36 Nm, la primera fue de alrededor de 4,5 m/s y la posterior de 2,5 m/s, dando un cut-in wind de 3,5 m/s, lo que parece respetable pero significa que la turbina no puede ser utilizada para la producción de energía a la velocidad media del viento de muchos sitios! La alta velocidad para el arranque del aerogenerador es desafortunada, pero comprensible, ya que rara vez las pequeñas turbinas utilizan ajuste en el ángulo de paso (pitch control) - otra gran diferencia con las grandes turbinas - lo que significa que los ángulos típicos de ataque en las palas fijas son muy altas, y el par aerodinámico resultante es bajo.")
50
Protección contra exceso de velocidad de viento
Las pequeñas turbinas de viento no suelen tener un freno automático de parada de emergencia. Los mecanismos de seguridad más comunes son Aumento en el ángulo de paso o Inclinación Desvío respecto a la dirección del viento. Pitch-up requiere abisagrar la turbina en el plano horizontal detrás del centro de masa de la turbina de manera que el momento alrededor de la articulación del empuje del rotor a alta velocidad del viento superará el momento de restauración debido a la gravedad. Algún elemento de amortiguación es generalmente necesario. El ángulo de paso se ve comprometido por el hecho de que el momento giroscópico en el eje principal o bien puede ayudar a asistir o resistir el cabeceo en función de la velocidad de guiñada, así que es posible tener una situación en la que la turbina necesita un determinado ángulo de paso para parar con seguridad, pero se lo impide así la guiñada rápida en la dirección equivocada. Además, parece que el momento giroscópico aumenta más rápidamente que el momento debido a que aumenta el tamaño de empuje con el tamaño de la turbina.

51
Alto de la turbina tanto para la protección de la turbina, o para el mantenimiento de la turbina, es necesario ser capaz de parar las palas o reducir su velocidad a un valor aceptablemente bajo. Los métodos son un freno de accionamiento manual, o bajar una torre articulada de tal manera que las palas estén paralelas al suelo. La más útil es un freno (posiblemente manual hidraulico), ya que permite que el trabajo se realiza hasta la torre, pero en estas circunstancias, es necesario que la turbina está bloqueado en guiñada, o bien cualquier cambio de dirección del viento posiblemente golpe al trabador que se encuentra dando mantenimiento en lo alto de la torre.
, ya que permite que el trabajo se realiza hasta la torre, pero en estas circunstancias, es necesario que la turbina está bloqueado en guiñada, o bien cualquier cambio de dirección del viento posiblemente golpe al trabador que se encuentra dando mantenimiento en lo alto de la torre.")
52
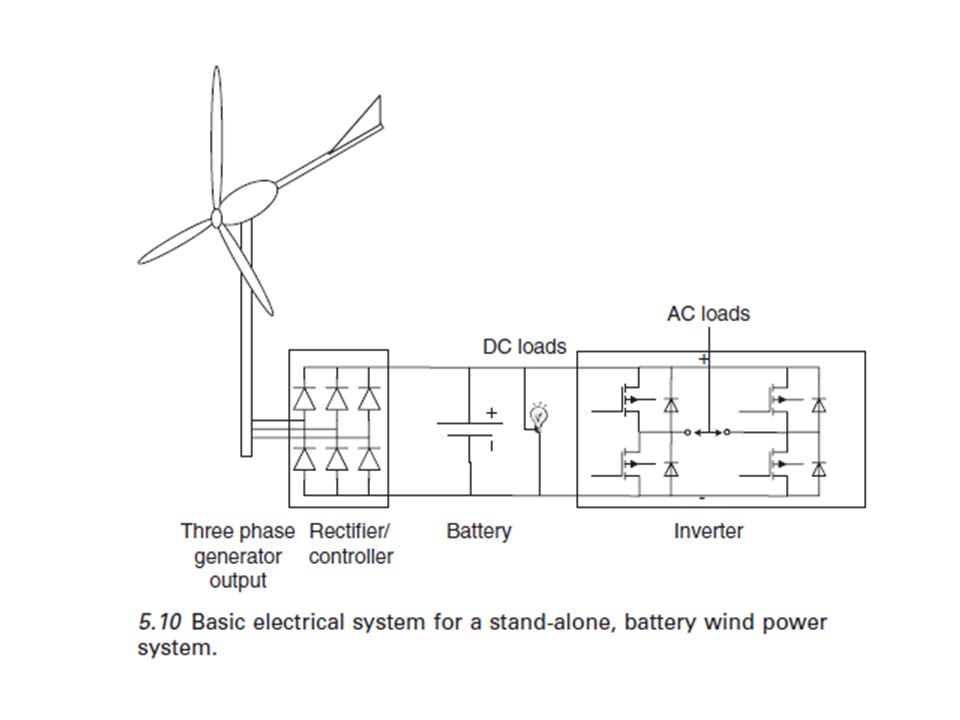
5,4 Control y electrónica Los controladores de turbinas eólicas están diseñados para proporcionar energía eléctrica adecuada a la carga y para proteger a la turbina, y posiblemente también para proteger la carga. Las cuestiones principales de control son los siguientes: • Salida de tensión adecuada; • Limitar la corriente del generador; • Limitar la velocidad del generador; • Maximización de potencia de (MPPT); • Protección a vientos fuertes (si esto no se hace aerodinámicamente); • Parada cuando la potencia no es necesaria; • Los límites de temperatura (generador, controlador); • Los impactos de rayos. Es posible que todas las funciones de control anteriores son regulados por un solo microprocesador. Sin embargo, algo de control secundario se requiere en el caso de fallo del microprocesador. La salida eléctrica del generador de CA es generalmente de tres fases con una tensión variable y frecuencia variable. Esto generalmente se rectifica (convertido a DC) y la energía almacenada en una batería. Las cargas de DC pueden ser alimentados directamente de la batería. Un inversor se utiliza para convertir el voltaje de la batería de DC a la frecuencia fija y el voltaje de CA, como se encuentra en casas ordinarias electricidad de la red conectados (por ejemplo, 230 V, 50 Hz, 110 V/60 Hz).
; • Protección a vientos fuertes (si esto no se hace aerodinámicamente); • Parada cuando la potencia no es necesaria; • Los límites de temperatura (generador, controlador); • Los impactos de rayos. Es posible que todas las funciones de control anteriores son regulados por un solo microprocesador. Sin embargo, algo de control secundario se requiere en el caso de fallo del microprocesador. La salida eléctrica del generador de CA es generalmente de tres fases con una tensión variable y frecuencia variable. Esto generalmente se rectifica (convertido a DC) y la energía almacenada en una batería. Las cargas de DC pueden ser alimentados directamente de la batería. Un inversor se utiliza para convertir el voltaje de la batería de DC a la frecuencia fija y el voltaje de CA, como se encuentra en casas ordinarias electricidad de la red conectados (por ejemplo, 230 V, 50 Hz, 110 V/60 Hz).")
53
5.4.1 controlador Un controlador de aerogenerador típico incorpora el rectificador que se asocia a menudo con MPPT. Un control del rectificador también asegura que hay un límite de corriente para proteger el generador. El controlador también puede monitorear el estado de la batería para asegurar que la batería no se sobrecarga. El controlador se utiliza a menudo como la principal forma de protección contra velocidad excesiva, por ejemplo limitando o reduciendo la velocidad de la pala cuando la potencia nominal (máxima) de potencia se ha producido. En este caso, los controles aerodinámicos se utilizan sólo cuando hay un fallo eléctrico. Algunas turbinas pequeñas dependen enteramente de la protección electrónica de exceso de velocidad.
 de potencia se ha producido. En este caso, los controles aerodinámicos se utilizan sólo cuando hay un fallo eléctrico. Algunas turbinas pequeñas dependen enteramente de la protección electrónica de exceso de velocidad.")
54
5.4.2 Inversor El inversor se esforzará para producir la tensión de salida correcta y la frecuencia, y (normalmente) también monitorea la batería. Si la carga de la batería es demasiado baja, el inversor se apagará automáticamente para proteger la batería. Sin embargo, las cargas de DC no pueden ser directamente controlados y la batería puede sufrir daños por descargas excesivas. Los inversores suelen utilizar la modulación por ancho de pulso (PWM). El resultado de PWM es una onda cuadrada sinusoidal que debe ser filtrado para producir una buena aproximación a una onda sinusoidal pura. Al alimentar cargas magnéticas que están diseñados para trabajar a partir de voltajes sinusoidales, tales como un motor eléctrico, la calidad de la tensión es crítica. Inversores baratos producen una salida de onda casi cuadrada, que puede causar un calentamiento excesivo de las cargas magnéticas. Sin embargo, muchos elementos modernos tienen acondicionadores electrónicos de potencia. Por ejemplo, las modernas máquinas de lavado utilizan variadores de velocidad, y los equipos tienen fuentes de alimentación de electrónica de potencia. Estos son insensibles a la forma de onda de tensión y puede manejar con una tensión cercana a una onda cuadrada en voltaje. Sin embargo, una tensión cuadrada es probable que cause más interferencia electromagnética y por lo tanto debe ser evitada en lo general.
 también monitorea la batería. Si la carga de la batería es demasiado baja, el inversor se apagará automáticamente para proteger la batería. Sin embargo, las cargas de DC no pueden ser directamente controlados y la batería puede sufrir daños por descargas excesivas. Los inversores suelen utilizar la modulación por ancho de pulso (PWM). El resultado de PWM es una onda cuadrada sinusoidal que debe ser filtrado para producir una buena aproximación a una onda sinusoidal pura. Al alimentar cargas magnéticas que están diseñados para trabajar a partir de voltajes sinusoidales, tales como un motor eléctrico, la calidad de la tensión es crítica. Inversores baratos producen una salida de onda casi cuadrada, que puede causar un calentamiento excesivo de las cargas magnéticas. Sin embargo, muchos elementos modernos tienen acondicionadores electrónicos de potencia. Por ejemplo, las modernas máquinas de lavado utilizan variadores de velocidad, y los equipos tienen fuentes de alimentación de electrónica de potencia. Estos son insensibles a la forma de onda de tensión y puede manejar con una tensión cercana a una onda cuadrada en voltaje. Sin embargo, una tensión cuadrada es probable que cause más interferencia electromagnética y por lo tanto debe ser evitada en lo general.")
55
5.4.3 Problemas en los generadores por aumento de temperatura
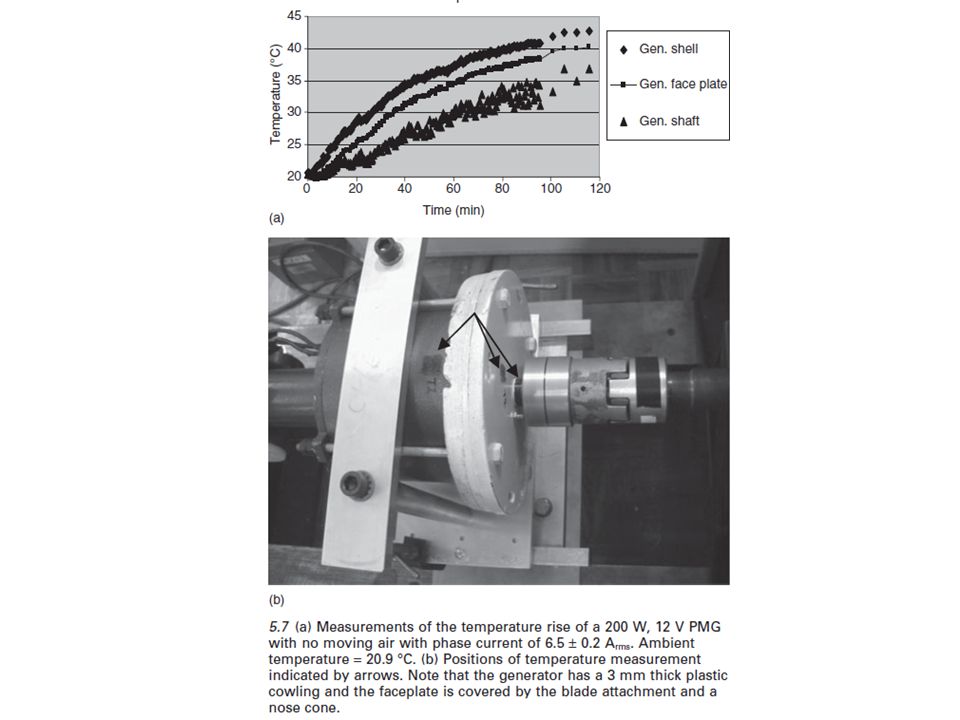
Una corriente excesiva en el generador conduce a sobrecalentamiento y, posiblemente, un derretimiento del aislamiento, seguido por la derretimiento de los cables. Si se produce un cortocircuito en los devanados, habrá una gran cantidad de corriente que fluye, por lo general que conduce a un rápido frenado del generador (y el riesgo de dañar las palas). Esto puede ser seguido por la fusión de los hilos de cobre y la no generación de energía. Bajo estas circunstancias, la turbina perderá carga y luego se acelerará, posiblemente hasta el punto de autodestrucción por las fuerzas centrífugas en las palas. Puesto que los generadores son generalmente enfriados por aire, la capacidad de generador de corriente depende de la temperatura del aire, la velocidad del viento, la resistencia térmica de los cables al aire y también la pérdida de calor en el generador. En la figura 5.7 se muestra la generación como función de la temaperatura.
. Esto puede ser seguido por la fusión de los hilos de cobre y la no generación de energía. Bajo estas circunstancias, la turbina perderá carga y luego se acelerará, posiblemente hasta el punto de autodestrucción por las fuerzas centrífugas en las palas. Puesto que los generadores son generalmente enfriados por aire, la capacidad de generador de corriente depende de la temperatura del aire, la velocidad del viento, la resistencia térmica de los cables al aire y también la pérdida de calor en el generador. En la figura 5.7 se muestra la generación como función de la temaperatura.")
57
5.4.4 Limitación de corriente
La mayoría de los controladores electrónicos de potencia limitan la corriente tanto por una breve incursión de apagar la salida de DC rectificada (como en un convertidor DC-DCC) o apagando parte de la forma de onda de corriente alterna (es decir, control de fase). Para los generadores síncronos, la excitación se puede ajustar. Entonces, el controlador puede tener una potencia mucho menor que si se controla la salida completa del generador. Un método simple de control de la corriente utilizado en algunas micro-turbinas eólicas, ha sido detectar la temperatura del devanado del generador, y si es demasiado alta, para insertar una impedancia adicional reduciendo así la corriente.
 o apagando parte de la forma de onda de corriente alterna (es decir, control de fase). Para los generadores síncronos, la excitación se puede ajustar. Entonces, el controlador puede tener una potencia mucho menor que si se controla la salida completa del generador. Un método simple de control de la corriente utilizado en algunas micro-turbinas eólicas, ha sido detectar la temperatura del devanado del generador, y si es demasiado alta, para insertar una impedancia adicional reduciendo así la corriente.")
58
5.4.5 Exceso de velocidad en el generador
En el generador, las fuerzas centrífugas por exceso de velocidad pueden hacer que las bobinas del rotor o imanes puedan desprenderse (dependiendo de cómo los imanes se han unido al rotor). Luego, estas bobinas o imanes pueden dañar el rotor, lo que obliga a detener rápidamente, para evitar dañar las palas o la caja de engranes. Algunos imanes de alto rendimiento son inflamables, y pueden incendiarse una vez que su capa protectora se daña. La primera y más importante para controlar la velocidad de la turbina es mantener el generador eléctrico cargado. En circunstancias normales, esto funciona bien hasta que el límite de corriente es alcanzado. Entonces la carga eléctrica debe ser reducida y la turbina se acelerará. Cuando la protección aerodinámica por exceso de velocidad no funciona, otro mecanismo de control se necesita. Si el controlador tiene un microprocesador suficientemente poderoso, este puede detectar el exceso de velocidad y operar un motor que reorienta la turbina fuera del viento, o operar un freno para detener la turbina, o aumentar drásticamente la carga en el generador para detener temporalmente la turbina.
. Luego, estas bobinas o imanes pueden dañar el rotor, lo que obliga a detener rápidamente, para evitar dañar las palas o la caja de engranes. Algunos imanes de alto rendimiento son inflamables, y pueden incendiarse una vez que su capa protectora se daña. La primera y más importante para controlar la velocidad de la turbina es mantener el generador eléctrico cargado. En circunstancias normales, esto funciona bien hasta que el límite de corriente es alcanzado. Entonces la carga eléctrica debe ser reducida y la turbina se acelerará. Cuando la protección aerodinámica por exceso de velocidad no funciona, otro mecanismo de control se necesita. Si el controlador tiene un microprocesador suficientemente poderoso, este puede detectar el exceso de velocidad y operar un motor que reorienta la turbina fuera del viento, o operar un freno para detener la turbina, o aumentar drásticamente la carga en el generador para detener temporalmente la turbina.")
59
5.4.7 Protección del control
Los controladores de turbina se encuentran en el mismo edificio que las baterías y tienen requisitos similares para la protección. Por ejemplo, debe mantenerse seca ya que la humedad puede ser un problema serio. En condiciones de calor, los componentes electrónicos deben estar bien sombreados y ventilados. La sensibilidad al calor depende del grado de componente electrónico utilizado y su vida generalmente se reduce a medida que aumenta la temperatura.

60
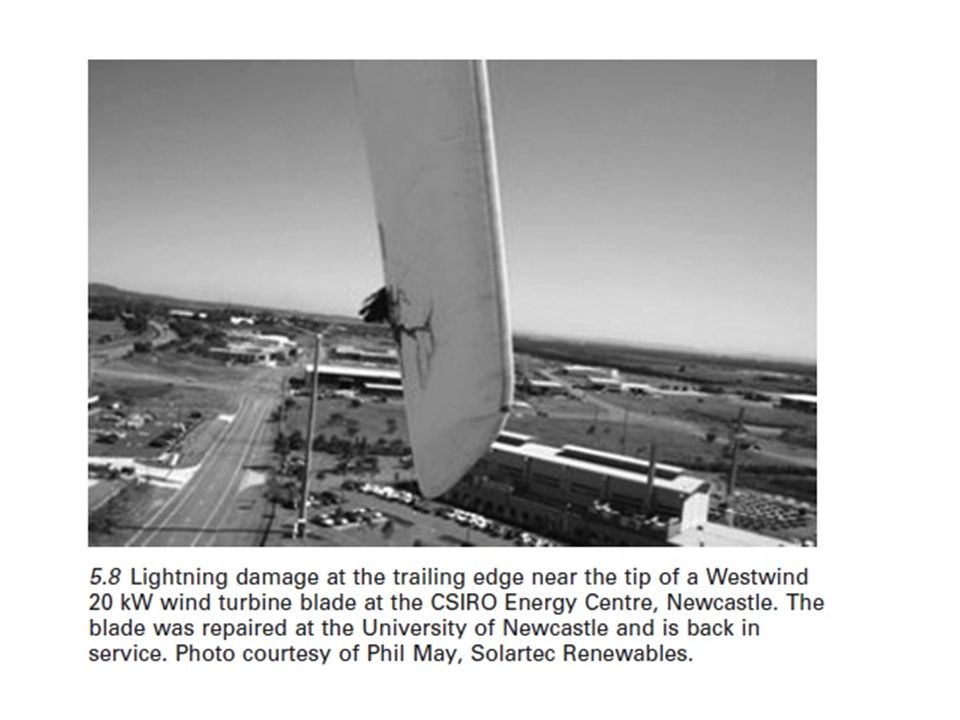
5.4.8 Los rayos La energía de un rayo (ver fig. 5.8) es tal que un impacto directo no puede ser totalmente protegido. Por otra parte, la IEC (2006) exonera a las pequeñas palas de aerogeneradores de tener protección contra rayos, mientras que la norma correspondiente a grandes turbinas obliga la utilización de protección en las palas (Burton et al. 2001). Sin embargo, las rayos que inducen corrientes eléctricas pueden ser mitigados por ofrecer un camino de menor resistencia por puesta a tierra. Se ha afirmado que el uso de dispositivos magnéticos como el elemento principal de control, junto con supresores de chispas, que ayudaría a proteger a cualquier sistema electrónico de control, pero hasta ahora parece que hay poca evidencia directa, y sólo un poco de evidencia anecdótica. Las turbinas grandes también tienen conexiones eléctricas de los conductores a un conductor de puesta a tierra en la torre, con la idea de conducir el rayo a tierra de forma segura. Una protección similar se puede añadir a las turbinas pequeñas pero a menudo se evita, probablemente debido a razones de coste, ya menudo se justifica por la altura de la torre inferior; la frecuencia de rayos es proporcional al cuadrado de la altura del buje más el radio la pala (Rachidi et al. 2009).
 es tal que un impacto directo no puede ser totalmente protegido. Por otra parte, la IEC (2006) exonera a las pequeñas palas de aerogeneradores de tener protección contra rayos, mientras que la norma correspondiente a grandes turbinas obliga la utilización de protección en las palas (Burton et al. 2001). Sin embargo, las rayos que inducen corrientes eléctricas pueden ser mitigados por ofrecer un camino de menor resistencia por puesta a tierra. Se ha afirmado que el uso de dispositivos magnéticos como el elemento principal de control, junto con supresores de chispas, que ayudaría a proteger a cualquier sistema electrónico de control, pero hasta ahora parece que hay poca evidencia directa, y sólo un poco de evidencia anecdótica. Las turbinas grandes también tienen conexiones eléctricas de los conductores a un conductor de puesta a tierra en la torre, con la idea de conducir el rayo a tierra de forma segura. Una protección similar se puede añadir a las turbinas pequeñas pero a menudo se evita, probablemente debido a razones de coste, ya menudo se justifica por la altura de la torre inferior; la frecuencia de rayos es proporcional al cuadrado de la altura del buje más el radio la pala (Rachidi et al. 2009).")
62
5.5 Sistemas autónomos de energía
Sistemas autónomos de energía son necesarias donde no hay electricidad de la red (Fig. 5.9), o la red eléctrica no es factible. El sistema eléctrico básico se muestra en la fig. 5,10. Sin embargo, los usos de la electricidad y por lo tanto la potencia requerida, puede ser diferente para distintas aplicaciones.
, o la red eléctrica no es factible. El sistema eléctrico básico se muestra en la fig. 5,10. Sin embargo, los usos de la electricidad y por lo tanto la potencia requerida, puede ser diferente para distintas aplicaciones.")
64
5.5.1 Establecimiento de las necesidades y practicidad de la energía eólica
Los sistemas eólicos pequeños para generación de electricidad pueden proporcionarle una fuente práctica y económica de electricidad, siempre y cuando: • Su propiedad cuenta con un buen recurso eólico • Si se trata de una granja o rancho para actividad productiva, éste debe estar ubicado en una área rural de al menos 4000m2 de extensión • Las cláusulas o normas de su localidad permiten la instalación de turbinas eólicas • Su facturación promedio de electricidad por mes es de 150 dólares o más • Su propiedad se encuentra en una área remota con dificultades para el acceso de la red de suministro de electricidad • No le disgusta invertir a plazos largos.

66
5.5.2 Aspectos que se deben tomar en cuenta en localidad
Antes de invertir en un sistema de energía eólica, debe tomar en cuenta posibles problemas que pudieran surgir. Por ejemplo, algunas jurisdicciones restringen la altura de estructuras en áreas residenciales, aunque frecuentemente es posible que existan excepciones. La mayoría de las leyes limitan esta altura a 10m y se requieren permisos especiales de la municipalidad. Se puede conocer estas restricciones llamando al inspector local de construcciones, al departamento de supervisores, o al de planeación. Ellos pueden indicar si requiere obtener un permiso de construcción y proporcionarle una lista de requerimientos. Adicionalmente, los vecinos podrían objetar que la turbina eólica obstruye su visibilidad, o podría molestarles el ruido. La mayoría de los problemas de estética y de su localidad pueden ser sorteados proporcionando información objetiva de la energía eólica. Por ejemplo, el nivel de ruido de las turbinas eólicas residenciales modernas está entre los 52 y 55 dB(A). Esto significa que se puede distinguir el ruido de la turbina eólica únicamente si uno se lo propone y se concentra en hacerlo, así que una turbina eólica para aplicaciones domésticas no es más ruidosa que su refrigerador.
. Esto significa que se puede distinguir el ruido de la turbina eólica únicamente si uno se lo propone y se concentra en hacerlo, así que una turbina eólica para aplicaciones domésticas no es más ruidosa que su refrigerador.")
67
5.6 Tamaño de turbina eólica requerido
El tamaño de turbina eólica que se requiere depende del uso que vaya a hacer de ella. El rango de turbinas pequeñas se encuentra entre los 20 watts y los 100 kilowatts. Las más pequeñas o “micro” (de 20 a 500 watts) se emplean en una gran variedad de aplicaciones, tales como la carga de baterías para vehículos recreacionales y de veleros, algunas luminarias, radio banda-civil, entre otros. Las turbinas de 1 a 10 kilowatts pueden ser usadas para bombear agua. La energía eólica ha sido usada por siglos en esta aplicación y para la molienda de granos. Aunque los molinos de viento mecánicos aun son una opción sensiblemente de bajo costo para el bombeo de agua en zonas de poco viento, los granjeros y propietarios de ranchos han descubierto que el bombeo eoloeléctrico es más versátil y pueden bombear el doble de volumen de agua con la misma inversión inicial. Además, los molinos de viento tienen que ser colocados encima del pozo donde se extrae el agua, y por lo tanto no se puede aprovechar las mejores condiciones de viento de otros sitios. Los sistemas eoloeléctricos pueden ser colocados donde se encuentra el mejor recurso del viento y conectarse al motor de una bomba mediante un cableado apropiado. Las turbinas para aplicaciones residenciales pueden estar en el rango de los 400 watts y hasta los 100 kW (para cargas muy grandes), dependiendo de la cantidad de electricidad que se desee generar.
 se emplean en una gran variedad de aplicaciones, tales como la carga de baterías para vehículos recreacionales y de veleros, algunas luminarias, radio banda-civil, entre otros. Las turbinas de 1 a 10 kilowatts pueden ser usadas para bombear agua. La energía eólica ha sido usada por siglos en esta aplicación y para la molienda de granos. Aunque los molinos de viento mecánicos aun son una opción sensiblemente de bajo costo para el bombeo de agua en zonas de poco viento, los granjeros y propietarios de ranchos han descubierto que el bombeo eoloeléctrico es más versátil y pueden bombear el doble de volumen de agua con la misma inversión inicial. Además, los molinos de viento tienen que ser colocados encima del pozo donde se extrae el agua, y por lo tanto no se puede aprovechar las mejores condiciones de viento de otros sitios. Los sistemas eoloeléctricos pueden ser colocados donde se encuentra el mejor recurso del viento y conectarse al motor de una bomba mediante un cableado apropiado. Las turbinas para aplicaciones residenciales pueden estar en el rango de los 400 watts y hasta los 100 kW (para cargas muy grandes), dependiendo de la cantidad de electricidad que se desee generar.")
68
5.6.1 Aplicaciones Residenciales.
Para aplicaciones residenciales, es recomendable definir las necesidades de energía para establecer el tamaño adecuado del aerogenerador. Debido a que la eficiencia energética es más barata que la producción de energía, aplicando estas prácticas en su hogar seguramente obtendrá mejores resultados de costo / beneficio y como consecuencia requerirá una turbina de menor tamaño. Los fabricantes de turbinas eólicas pueden auxiliarlo a dimensionar el tamaño que usted requiere de acuerdo con sus consumos de electricidad y al recurso eólico de su localidad. Un hogar típico de clase media consume aproximadamente 9,400 kilowatt-horas al año (cerca de 780 kWh por mes). Dependiendo de la velocidad promedio del viento en el área una turbina de potencia nominal de entre 5 y 10 kilowatts, podría hacer una contribución importante para esta demanda. Una turbina de 1.5 kilowatts podría cubrir las necesidades en un hogar que consuma alrededor de 300 kWh al mes en un sitio con una velocidad de 6.26 metros por segundo de velocidad promedio anual. El fabricante puede proporcionarle una estimación de la generación de energía en función de éste parámetro. Asimismo, puede proporcionarle información acerca de la máxima velocidad de viento a que la turbina puede trabajar en forma segura. Aunque la mayoría de ellas cuentan con sistemas de control para evitar que gire a altas velocidades cuando existen vientos muy intensos y sufrir algún desperfecto.
. Dependiendo de la velocidad promedio del viento en el área una turbina de potencia nominal de entre 5 y 10 kilowatts, podría hacer una contribución importante para esta demanda. Una turbina de 1.5 kilowatts podría cubrir las necesidades en un hogar que consuma alrededor de 300 kWh al mes en un sitio con una velocidad de 6.26 metros por segundo de velocidad promedio anual. El fabricante puede proporcionarle una estimación de la generación de energía en función de éste parámetro. Asimismo, puede proporcionarle información acerca de la máxima velocidad de viento a que la turbina puede trabajar en forma segura. Aunque la mayoría de ellas cuentan con sistemas de control para evitar que gire a altas velocidades cuando existen vientos muy intensos y sufrir algún desperfecto.")
69
5.7 Conclusiones En este capítulo se describe la tecnología básica de pequeñas turbinas de viento y su uso en sistemas de energía independientes con respaldo de batería. En particular, se encuestó a diseño de la pala, especialmente para un rendimiento de baja velocidad del viento, las opciones para el generador, regulador y el inversor. La seguridad de la turbina es una consideración principal. El tamaño del sistema de potencia es crítico para su concepción y diseño. Estos temas fueron abordados en términos de aplicaciones típicas y las cargas asociadas a ellos. Se hizo hincapié en que a menudo es difícil y costoso determinar el recurso eólico, pero no hay una buena información a nivel mundial por muchos lugares y las reglas generales útiles para la mejor ubicación de una turbina. El diseño de un sistema de energía autónomo con turbinas eólicas se basa en la energía requerida esperada y las velocidades del viento esperados. A pesar de la información disponible, estas expectativas pueden estar equivocadas por razones imprevistas. Una de las incertidumbres es el del cambio climático - ¿Qué efecto tendrá esto en las velocidades del viento promedio?, pero en algunas áreas, parece que la actividad de huracanes y ciclones, así como tornados se espera un aumento significativo. En el peor de los casos esto puede significar que las velocidades de viento medias pueden disminuir, pero las velocidades máximas del viento puede aumentar, lo que dificulta el dimensionamiento del sistema.

70
5.8 Referencias • AWEA (2008). American Wind Energy Association Small Wind Turbine Global Market Study 2008. • Bechly, M.E., Gutierrez, H., Streiner, S., Wood, D.H. (2002). Modelling the yaw behaviour of small wind turbines, Wind Engineering, 26, pp 223–239. • Burton, T., Sharpe, D., Jenkins, N., Bossanyi, E. (2001). Wind Energy Handbook, John Wiley & Sons. • Celik, A. (2003). Energy output estimation for small scale wind power generators using Weibull representative wind data, Journal of Wind Engineering and Industrial Aerodynamics, 91, pp 693–707. • Dalton, G.J., Lockington, D.A., Baldock, T.E. (2009). Case study feasibility analysis of renewable energy supply options for small to medium-sized tourist accommodations, Renewable Energy, 34, pp 1134–1144. • DoE (2005). Small Wind Electric Systems, US Department of Energy. Available online at Accessed: March 2009. • Hong, Y.Y., Shiue-Der Lu, S.-D., Ching-Sheng Chiou, C.-S. (2009). MPPT for PM wind generator using gradient approximation, Energy Conversion and Management, 50, pp 82–89. • IEC (International Electrotechnical Commission) (2006) –2 revision 2, 2006, Wind turbines – Part 2: Design requirements for small wind turbines, obtainable from
. Modelling the yaw behaviour of small wind turbines, Wind Engineering, 26, pp 223–239. • Burton, T., Sharpe, D., Jenkins, N., Bossanyi, E. (2001). Wind Energy Handbook, John Wiley & Sons. • Celik, A. (2003). Energy output estimation for small scale wind power generators using Weibull representative wind data, Journal of Wind Engineering and Industrial Aerodynamics, 91, pp 693–707. • Dalton, G.J., Lockington, D.A., Baldock, T.E. (2009). Case study feasibility analysis of renewable energy supply options for small to medium-sized tourist accommodations, Renewable Energy, 34, pp 1134–1144. • DoE (2005). Small Wind Electric Systems, US Department of Energy. Available online at Accessed: March • Hong, Y.Y., Shiue-Der Lu, S.-D., Ching-Sheng Chiou, C.-S. (2009). MPPT for PM wind generator using gradient approximation, Energy Conversion and Management, 50, pp 82–89. • IEC (International Electrotechnical Commission) (2006) –2 revision 2, 2006, Wind turbines – Part 2: Design requirements for small wind turbines, obtainable from")
71
•. Joerissen, L. , Garche, J. , Fabjan, Ch. , Tomzic, G. (2004)
• Joerissen, L., Garche, J., Fabjan, Ch., Tomzic, G. (2004). Possible use of vanadium redox-flow batteries for energy storage in small grids and stand-alone photovoltaic systems, Journal of Power Sources, 127, pp 98–104. • Kaldellis, J.K. (2004). Parametric investigation concerning dimensions of a standalone wind-power system, Applied Energy, 77, pp 35–50. • Kaldellis, J.K., Kavadiasa, K.A, Koronakisb, P.S. (2007). Comparing wind and photovoltaic stand-alone power systems used for the electrifi cation of remote consumers, Renewable and Sustainable Energy Reviews 11, pp 57–77. • McHenry, M.P. (2009). Why are remote Western Australians installing renewable energy technologies in stand-alone power supply systems?, Renewable Energy 34, pp 1252–1256. • Nelson, D., Nehrir, M., Wang, C. (2006). Unit sizing and cost analysis of stand-alone hybrid wind/PV/fuel cell power generation systems, Renewable Energy 31, pp 1641–1656. • Rachidi, F., Rubinstein, M., Montanyà, J., Bermúdez, J.-L., Rodríguez Sola, R., Solà, G., Korovkin, N. (2009). A review of current issues in lightning protection of new generation wind-turbine blades, IEEE Transactions on Industrial Electronics, 55,pp 2489 – 2496.
. Possible use of vanadium redox-flow batteries for energy storage in small grids and stand-alone photovoltaic systems, Journal of Power Sources, 127, pp 98–104. • Kaldellis, J.K. (2004). Parametric investigation concerning dimensions of a standalone wind-power system, Applied Energy, 77, pp 35–50. • Kaldellis, J.K., Kavadiasa, K.A, Koronakisb, P.S. (2007). Comparing wind and photovoltaic stand-alone power systems used for the electrifi cation of remote consumers, Renewable and Sustainable Energy Reviews 11, pp 57–77. • McHenry, M.P. (2009). Why are remote Western Australians installing renewable energy technologies in stand-alone power supply systems , Renewable Energy 34, pp 1252–1256. • Nelson, D., Nehrir, M., Wang, C. (2006). Unit sizing and cost analysis of stand-alone hybrid wind/PV/fuel cell power generation systems, Renewable Energy 31, pp 1641–1656. • Rachidi, F., Rubinstein, M., Montanyà, J., Bermúdez, J.-L., Rodríguez Sola, R., Solà, G., Korovkin, N. (2009). A review of current issues in lightning protection of new generation wind-turbine blades, IEEE Transactions on Industrial Electronics, 55,pp 2489 –")
72
•. Roy, A. , Kadere, S. B. , Bandyopadhyay, S. (2009)
• Roy, A., Kadere, S.B., Bandyopadhyay, S. (2009). Application of design space methodology for optimum sizing of wind–battery systems. Applied Energy doi: /j. apenergy , pp 2690–2703. • Shrestha, R.Y. (2009). Small scale wind energy market and institutional model for Nepal, Wind Engineering, 33, pp 109–122. • Sullivan, P., Short, W., Blair, N. (2008). Modeling the benefits of storage technologies with wind power, Wind Engineering, 32, pp 603–615. • Wood, D.H. (2001). An improved determination of the optimum tower height for a small wind turbine, Wind Engineering, 25, pp 191–196. • Wood, D.H. (2004). Dual purpose design of small wind turbine blades, Wind Engineering, 28, pp 511–527. • Wood, D.H. (2009). Using the IEC simple load model for small wind turbines, Wind Engineering, 33, pp 139–154. • Wright, A.D., Wood, D.H. (2004). The starting and low wind speed behaviour of a small horizontal-axis wind turbine, Journal of Wind Engineering and Industrial Aerodynamics, 92, pp 1265–1279. • Wright, A.D., Wood, D.H. (2007). Yaw rate, rotor speed and gyroscopic loads on a small horizontal axis wind turbine, Wind Engineering, 31, pp 197–209.
. Application of design space methodology for optimum sizing of wind–battery systems. Applied Energy doi: /j. apenergy , pp 2690–2703. • Shrestha, R.Y. (2009). Small scale wind energy market and institutional model for Nepal, Wind Engineering, 33, pp 109–122. • Sullivan, P., Short, W., Blair, N. (2008). Modeling the benefits of storage technologies with wind power, Wind Engineering, 32, pp 603–615. • Wood, D.H. (2001). An improved determination of the optimum tower height for a small wind turbine, Wind Engineering, 25, pp 191–196. • Wood, D.H. (2004). Dual purpose design of small wind turbine blades, Wind Engineering, 28, pp 511–527. • Wood, D.H. (2009). Using the IEC simple load model for small wind turbines, Wind Engineering, 33, pp 139–154. • Wright, A.D., Wood, D.H. (2004). The starting and low wind speed behaviour of a small horizontal-axis wind turbine, Journal of Wind Engineering and Industrial Aerodynamics, 92, pp 1265–1279. • Wright, A.D., Wood, D.H. (2007). Yaw rate, rotor speed and gyroscopic loads on a small horizontal axis wind turbine, Wind Engineering, 31, pp 197–209.")
74
6. Sistemas de energía híbridos eólico-diesel
G. BHUVANESWARI and R. BALASUBRAMANIAN, Indian Institute of Technology (Delhi), India Los sistemas híbridos eólico-diesel están ganando importancia tanto desde el punto de vista técnico como económico, ya que son capaces de suministrar electricidad a zonas remotas, islas y zonas montañosas, alejadas de la red de alta tensión. Este capítulo trata de algunos puntos importantes sobre los sistemas eólico-diesel, tales como las circunstancias en que pueden ser instalados los sistema híbrido eólico-diesel (HWDES), la visión global del sistema, las consideraciones de diseño, la selección de las calificaciones del generador y los sistemas de control, especialmente en la velocidad del viento variables y condiciones de carga fluctuante, el funcionamiento de un sistema de almacenamiento de energía en baterías (BESS), así como los aspectos de la simulación completa del HWDES
, India. Los sistemas híbridos eólico-diesel están ganando importancia tanto desde el punto de vista técnico como económico, ya que son capaces de suministrar electricidad a zonas remotas, islas y zonas montañosas, alejadas de la red de alta tensión. Este capítulo trata de algunos puntos importantes sobre los sistemas eólico-diesel, tales como las circunstancias en que pueden ser instalados los sistema híbrido eólico-diesel (HWDES), la visión global del sistema, las consideraciones de diseño, la selección de las calificaciones del generador y los sistemas de control, especialmente en la velocidad del viento variables y condiciones de carga fluctuante, el funcionamiento de un sistema de almacenamiento de energía en baterías (BESS), así como los aspectos de la simulación completa del HWDES.")
75
Contenido 6.1 Introducción
6.2 Vista general del sistema de generación eólico-diesel 6.3 Tamaño de la turbina de viento en esquema híbrido eólico-diesel 6.4 Sistemas eólico-diesel: consideraciones de diseño 6.5 Componentes de un sistema híbrido eólico-diesel 6.6 Estrategias de control para sistemas de generación eólico-diesel 6.7 Modelización y simulación de sistemas eólico-diesel 6.8 Conclusiones 6.9 Tendencias futuras

76
6.1 Introducción Una de las limitaciones de los WECS, sin embargo, es el hecho de que la velocidad del viento continuamente fluctua tanto en el ciclo diario, así como estacionalmente. En vista de esto, es deseable tener un sistema híbrido que complementa la salida de los WECS de modo que la mayor parte de las necesidades de energía se cumplen. Sistemas eólico-diésel son adecuados para aquellos lugares donde el diesel es de fácil acceso (Freris, 1990). El sistema de generación diesel tiene que ser usado con moderación debido a consideraciones de costo y el efecto invernadero de las emisiones de gases. Además, los motores diesel tienen que hacerse funcionar a un mínimo de aproximadamente el 20-40% de su capacidad completa debido a limitaciones técnicas de su ejecución en cargas bajas y debido a consideraciones económicas. Además, mientras se opera en conjunción WECS, los motores diesel no se puede encender y apagar con mucha frecuencia debido a que darán lugar fatiga de las piezas mecánicas del motor. También hay un tiempo mínimo de puesta en marcha para los motores diesel. Esto requiere el uso de un mecanismo de almacenamiento de energía que sería capaz de cubrir el déficit cuando la velocidad del viento es baja, incluso para satisfacer la demanda de carga de base.
. El sistema de generación diesel tiene que ser usado con moderación debido a consideraciones de costo y el efecto invernadero de las emisiones de gases. Además, los motores diesel tienen que hacerse funcionar a un mínimo de aproximadamente el 20-40% de su capacidad completa debido a limitaciones técnicas de su ejecución en cargas bajas y debido a consideraciones económicas. Además, mientras se opera en conjunción WECS, los motores diesel no se puede encender y apagar con mucha frecuencia debido a que darán lugar fatiga de las piezas mecánicas del motor. También hay un tiempo mínimo de puesta en marcha para los motores diesel. Esto requiere el uso de un mecanismo de almacenamiento de energía que sería capaz de cubrir el déficit cuando la velocidad del viento es baja, incluso para satisfacer la demanda de carga de base.")
77
Cuando estos sistemas de almacenamiento de energía se emplean, serían muy útiles para almacenar parte de la potencia generada cuando la velocidad del viento es alta y la carga en el sistema es baja. Una de las tecnologías maduras y bien establecidas para el almacenamiento de energía son los sistemas de almacenamiento de energía de la batería (BESS) (Barton y Infield, 2004; Borowy y Salameh, 1997). El funcionamiento coordinado de estos tres componentes, los WECS, generador diesel y BESS, podría ser una opción rentable tanto desde el punto de vista técnico y económico. BESS también puede ayudar en el control de potencia activa y reactiva de todo el sistema distribuido generado para lograr el factor de potencia óptima en cada uno de los buses de distribución (Chiang et al, 1995;.. Lin et al, 1992) del sistema. Este capítulo presenta las principales características de un moderno sistema eólico-diesel híbrido de generación, sus aspectos de modelado y algunos estudios de simulación en este sistema. El énfasis principal de este capítulo es sobre los diferentes generadores eléctricos provistos de adecuados convertidores de potencia electrónicos en estos sistemas híbridos y las configuraciones de control correspondientes.
 (Barton y Infield, 2004; Borowy y Salameh, 1997). El funcionamiento coordinado de estos tres componentes, los WECS, generador diesel y BESS, podría ser una opción rentable tanto desde el punto de vista técnico y económico. BESS también puede ayudar en el control de potencia activa y reactiva de todo el sistema distribuido generado para lograr el factor de potencia óptima en cada uno de los buses de distribución (Chiang et al, 1995;.. Lin et al, 1992) del sistema. Este capítulo presenta las principales características de un moderno sistema eólico-diesel híbrido de generación, sus aspectos de modelado y algunos estudios de simulación en este sistema. El énfasis principal de este capítulo es sobre los diferentes generadores eléctricos provistos de adecuados convertidores de potencia electrónicos en estos sistemas híbridos y las configuraciones de control correspondientes..")
79
6.2 Vista general del Sistema de Generación eólico-diesel
La Figura 6.1 muestra un diagrama esquemático de un sistema típico de híbrido de generación de energía eólica-diesel. La tendencia moderna en el diseño de turbinas eólicas es capturar la máxima energía disponible en el viento a través del rastreo del punto de máxima potencia (MPPT), incluso en condiciones de fluctuación de la velocidad del viento (Mutoh y Nagasawa, 2006;. Wai et al, 2007). Existen también técnicas disponibles ahora para hacer que el acoplamiento mecánico entre la turbina y el generador de viento sin el usos de engranajes, evitando así la pérdida de transmisión mecánica y aumentando la de eficiencia y fiabilidad del sistema. El generador utilizado en estos sistemas puede ser un generador síncrono o un generador de inducción. Muchos de los WECS modernos utilizan un generador síncrono de imanes permanentes (PMSG) o un generador de inducción doblemente alimentado (DFIG). La PMSG tiene imanes permanentes en el rotor para proporcionar el campo magnético necesario. El estator lleva los tres devanado de fase de armadura donde se genera la tensión. Las máquinas de inducción se pueden utilizar en el modo de generación siempre que la excitación está disponible en los terminales del estator ya sea por medio de condensadores de excitación (si es un generador autónomo) o por medio de conexión a la red. En una máquina de inducción de jaula de ardilla, los terminales del estator sólo son accesibles y el rotor está en cortocircuito. Así, la excitación tiene que ser suministrada sólo a través de los terminales del estator.
, incluso en condiciones de fluctuación de la velocidad del viento (Mutoh y Nagasawa, 2006;. Wai et al, 2007). Existen también técnicas disponibles ahora para hacer que el acoplamiento mecánico entre la turbina y el generador de viento sin el usos de engranajes, evitando así la pérdida de transmisión mecánica y aumentando la de eficiencia y fiabilidad del sistema. El generador utilizado en estos sistemas puede ser un generador síncrono o un generador de inducción. Muchos de los WECS modernos utilizan un generador síncrono de imanes permanentes (PMSG) o un generador de inducción doblemente alimentado (DFIG). La PMSG tiene imanes permanentes en el rotor para proporcionar el campo magnético necesario. El estator lleva los tres devanado de fase de armadura donde se genera la tensión. Las máquinas de inducción se pueden utilizar en el modo de generación siempre que la excitación está disponible en los terminales del estator ya sea por medio de condensadores de excitación (si es un generador autónomo) o por medio de conexión a la red. En una máquina de inducción de jaula de ardilla, los terminales del estator sólo son accesibles y el rotor está en cortocircuito. Así, la excitación tiene que ser suministrada sólo a través de los terminales del estator.")
81
Por otro lado, en una máquina de inducción de rotor devanado puede funcionar como un DFIG, tanto el estator y el rotor terminales son accesibles y por lo tanto, la excitación se puede proporcionar a partir de cualquiera de ellos o ambos. Los controladores electrónicos de potencia se utilizan para optimizar la producción de estos generadores en diferentes condiciones de velocidad del viento para poner en práctica el MPPT. Estos controladores electrónicos de potencia también juegan un papel vital en el control independiente del potencia real y el flujo de energía reactiva en el sistema para que la eficiencia y la mejor calidad de la energía se obtienga. Una de las características deseables de estos sistemas es que el generador diesel se pondrá en servicio sólo cuando la velocidad del viento predominante es insuficiente para satisfacer incluso las cargas esenciales en el sistema. La elección común de generador que se utiliza con el motor diesel es un generador síncrono. Una restricción impuesta en el motor diesel es que tiene que operar necesariamente a una carga mínima de aproximadamente 20% para un buen funcionamiento del motor y también para mantener la eficiencia del motor a un nivel razonable. Además, la conexión y la desconexión del motor diesel se evita en estos sistemas para evitar la fatiga en el motor.

82
A menudo no es posible igualar las variaciones en tiempo real en la demanda de carga con el de las variaciones en la velocidad del viento. Esto requiere un sistema de almacenamiento de energía que puede ser implementado con la ayuda de una volanta (Flywheel de almacenamiento de energía mecánica) o un banco de baterías (almacenamiento de energía eléctrica). En este capítulo, los BESS, que es una tecnología bien establecida, son considerados en el análisis . El controlador electrónico de potencia utilizada en el sistema BESS debe ser capaz de soportar flujo bidireccional de potencia para permitir la carga y descarga de las baterías según sea necesario. Sistemas eólico-diésel se implementan normalmente en lugares remotos y por lo tanto los requisitos de fiabilidad de todas las cargas que serán suministrados por estos sistemas no pueden ser exactas. Por lo tanto, en los estudios presentados aquí, las cargas se han dividido en tres componentes, a saber. una carga esencial o de alta prioridad-(por ejemplo, un sistema de apoyo médico); una carga de prioridad media (por ejemplo, industrial, cargas agrícolas y comerciales), y una carga de baja prioridad (por ejemplo, cargas internas). Este tipo de una división de carga facilitará lograr el mejor funcionamiento económico con la fiabilidad requerida para los diferentes tipos de cargas.
; una carga de prioridad media (por ejemplo, industrial, cargas agrícolas y comerciales), y una carga de baja prioridad (por ejemplo, cargas internas). Este tipo de una división de carga facilitará lograr el mejor funcionamiento económico con la fiabilidad requerida para los diferentes tipos de cargas.")
83
6.3 Tamaño de la turbina de viento en Esquema híbrido eólico-diesel
Cuando la energía eléctrica es suministrada a una isla o un lugar aislado, lejos de la red eléctrica, la generación distribuida es la única opción disponible. Los sistemas con generador diesel (DG) para la generación de energía son muy sencillos de instalar en estos casos, pero para reducir las emisiones de gases de efecto invernadero y también a reducir el costo operativo de generación, la energía eólica puede ser una opción muy adecuada usando como complemento los DG, sobre todo cuando el régimen de vientos en esa particular situación geográfica es buena (McKenna y Olsen, 1999). Antes de instalar un HWDES es esencial estudiar la variación de la velocidad del viento en esa ubicación geográfica con respecto a las distintas estaciones y también la variación diaria por hora en cada estación. La velocidad media del viento debe ser tal que con un tamaño viable de la turbina eólica, la energía eléctrica generada debe ser capaz de cumplir como mínimo los requisitos de carga esenciales.
 para la generación de energía son muy sencillos de instalar en estos casos, pero para reducir las emisiones de gases de efecto invernadero y también a reducir el costo operativo de generación, la energía eólica puede ser una opción muy adecuada usando como complemento los DG, sobre todo cuando el régimen de vientos en esa particular situación geográfica es buena (McKenna y Olsen, 1999). Antes de instalar un HWDES es esencial estudiar la variación de la velocidad del viento en esa ubicación geográfica con respecto a las distintas estaciones y también la variación diaria por hora en cada estación. La velocidad media del viento debe ser tal que con un tamaño viable de la turbina eólica, la energía eléctrica generada debe ser capaz de cumplir como mínimo los requisitos de carga esenciales.")
84
La ecuación que rige la relación entre la velocidad del viento y la energía generada (Masters, 2004) es: Con la ayuda de la ecuación anterior y dependiendo de las necesidades de potencia para la carga esencial, el diámetro del rotor de la turbina eólica tiene que ser calculado. A continuación, se debe comprobar si sería posible instalar una turbina eólica en el espacio disponible a una altura apropiada.

85
6.4 Consideraciones de Diseño del Sistema eólico-diesel:
El punto de partida para el diseño de un HWDES es evaluar la cantidad de carga que se suministra por el sistema de generación distribuida. Un primer intento se tiene que hacer al considerar satisfacer las cargas de alta prioridad con WECS y BESS a pesar de las variaciones en la velocidad del viento, lo que sería uno de los diseños más adecuados ya que esto minimiza el consumo de diesel. Como la carga de media prioridad incluye las cargas agrícolas, comerciales e industriales, estas se producen principalmente durante el día. De baja prioridad los requerimientos de carga domésticas será considerable durante las tardes y primeras horas de la mañana. El motor diesel debe ser capaz de soportar cualquier requisito adicional que surge en las de cargas de menor prioridad y también cualquier déficit causado por la velocidad del viento.

86
Hay dos estrategias básicas de funcionamiento que pueden adoptarse para el HWDES-BESS sistema. Una estrategia consiste en hacer funcionar el motor diesel de forma continua. Sin embargo, en este caso, el ahorro en el consumo de combustible diesel será mínimo, a pesar del hecho de que el propósito principal de la instalación HWDES es reducir el costo operativo. Además, una cantidad mínima de carga debe estar presente en el motor diesel todo el tiempo para optimizar su consumo de combustible. La otra estrategia operativa es hacer funcionar el motor diesel de forma intermitente a medida que surge la demanda. En este caso, el principal problema será debido a las limitaciones en la frecuencia de encendido / apagado del motor diesel y también el desgaste causado por la frecuencia de conmutación. Para evitar estos problemas, es mejor tener un sistema de almacenamiento de energía instalado. Cuando la velocidad del viento está por debajo del corte en la velocidad, el sistema de almacenamiento de energía debe estar en una posición para satisfacer la demanda de carga alta prioridad. Aunque hay varios tipos de sistemas de almacenamiento de energía (Kaldellis et al., 2009), Los BESS es uno de los métodos preferidos de almacenamiento de energía debido a su capacidad para proporcionar una respuesta rápida, menor tamaño en comparación con los sistemas mecánicos de almacenamiento de energía, y el espacio requerida es menor.
, Los BESS es uno de los métodos preferidos de almacenamiento de energía debido a su capacidad para proporcionar una respuesta rápida, menor tamaño en comparación con los sistemas mecánicos de almacenamiento de energía, y el espacio requerida es menor..")
87
6.4.1 Evaluación de la carga Como se mencionó en la sección anterior, las cargas se pueden clasificar en tres grupos, a saber, de alta prioridad, prioridad media y de baja prioridad. Para empezar, es esencial estimar la cantidad de cada una de estas cargas y sus variaciones respectivas sobre una base diaria y estacional. El perfil de la velocidad del viento también tiene que ser estudiado en relación con sus variaciones diarias y estacionales. Al comparar la variación de la carga cronológicamente y los perfiles de variación de velocidad del viento, uno será capaz de evaluar los desajustes que puedan producirse entre estos dos. Esta será la principal consideración para la fijación de la capacidad del sistema de almacenamiento de energía que se va a instalar.

88
6.4.2 Evaluación del recurso
Los datos de velocidad del viento del lugar propuesto para el HWDES tienen que ser recogidos, analizados y estudiados a fondo. La cuantía de la carga de alta prioridad que deben cumplir será el principal criterio para llegar a la calificación de la turbina eólica que se instalará. Los parámetros de diseño de la turbina de viento, tales como el diámetro del rotor y la relación de transmisión, se determina en función del perfil de la velocidad del viento y la potencia nominal de la turbina eólica (Kaldellis et al., 2006). El diesel se encuentra disponible en casi todos los sitios, por supuesto, a un alto costo. Por esta razón, el consumo de combustible se debe minimizar tanto como sea posible, haciendo uso de BESS.
. El diesel se encuentra disponible en casi todos los sitios, por supuesto, a un alto costo. Por esta razón, el consumo de combustible se debe minimizar tanto como sea posible, haciendo uso de BESS.")
89
6.4.3 Los requisitos de almacenamiento
Como las fluctuaciones de velocidad del viento en el intervalo de tiempo de minutos o segundos también son comunes, es posible que la velocidad del viento puede llegar a ser demasiado bajo, incluso para satisfacer los requisitos de carga de alta prioridad. En esas situaciones, el BESS puede jugar un papel importante. De manera similar, cuando la velocidad del viento alcanza valores altos, BESS puede almacenar el exceso de energía generada. Además, el motor diesel tiene restricciones en cuanto a carga mínima permitida en ella (alrededor de un 20-40% de su potencia nominal) y la frecuencia de conmutación y apagado. Además, las reducciones repentinas en la demanda de carga pueden ocurrir en el sistema durante el período de tiempo cuando el motor diesel está en funcionamiento. En tales ocasiones, la presencia de BESS resultará beneficioso.
 y la frecuencia de conmutación y apagado. Además, las reducciones repentinas en la demanda de carga pueden ocurrir en el sistema durante el período de tiempo cuando el motor diesel está en funcionamiento. En tales ocasiones, la presencia de BESS resultará beneficioso.")
90
6.5 Componentes de un sistema híbrido eólico-diesel
Los componentes principales de un híbrido eólico-diesel sistema de generación de energía son: • Turbina de viento con los controles asociados; • Motor diesel; • Generador eléctrico con controladores electrónicos de potencia; • Cargas eléctricas; • BESS.

91
6.5.1 Aerogenerador La turbina eólica debe ser controlada para capturar la energía del viento tanto como sea posible, dentro de los límites de potencia segura del generador y la turbina, durante baja velocidad del viento, así como condiciones de alta velocidad del viento. En condiciones de baja velocidad del viento, para un diseño de turbinas eólicas dada, la relación de velocidad punta tiene que ser llevado a un valor particular para lograr MPPT. Esto se realiza mediante el ajuste del par electromagnético del generador mediante el empleo de los controladores electrónicos de potencia adecuados para que el componente de par-produccción de la corriente en las tres fase de CA del generador está adecuadamente manipulados. Durante las condiciones de mayor velocidad del viento (mayor que la velocidad del viento nominal para el cual se ha diseñado la turbina), control de ángulo de paso se activa de manera que la capacidad del generador no se supera y las corrientes y voltajes están dentro de los límites de seguridad. Durante esta condición, el generador se operan bajo el control de potencia constante.
, control de ángulo de paso se activa de manera que la capacidad del generador no se supera y las corrientes y voltajes están dentro de los límites de seguridad. Durante esta condición, el generador se operan bajo el control de potencia constante.")
92
6.5.2 El motor diesel El motor diesel tendrá una velocidad de caída contra las características de potencia que serán controlados por la acción del regulador o gobernador. El modelo utilizado para el motor diesel puede ser un modelo de primer orden con una única constate de tiempo que representa la relación entre la tasa de consumo de combustible y la producción de par mecánico. La acción del regulador de velocidad está representada por un porcentaje de regulación de velocidad y una ganancia del controlador integral. El controlador integral ayuda a eliminar el error de frecuencia durante condiciones de estado estacionario.

93
6.5.3 Generadores Normalmente los generadores utilizados junto con los motores diesel son generadores trifásicos síncronos con devanado de campo. La tensión en bornes del generador síncrono se mantiene en el valor nominal por medio de control de excitación. El control de frecuencia se logra por medio del mecanismo de control del regulador del motor diesel. El generador que lleva el sistema de conversión de energía eólica podría ser un generador de inducción (IG) o una PMSG. Si un WECS con potencia cercana a la demanda nominal (que muy a menudo funciona en el modo de conexión a red), entonces DFIG podría ser una opción adecuada. Las ventajas de usar un DFIG son (i) la generación de energía eléctrica disponible tanto en velocidades del rotor sub-síncrona , así como en super-síncrona, dependiendo de la velocidad del viento, y (ii) la producción total de un DFIG podría ser tan alta como la suma de la potencia de capacidad de carga del devanado del estator y el devanado del rotor, cuando el rotor es accionado a velocidades super-síncrona.
 o una PMSG. Si un WECS con potencia cercana a la demanda nominal (que muy a menudo funciona en el modo de conexión a red), entonces DFIG podría ser una opción adecuada. Las ventajas de usar un DFIG son (i) la generación de energía eléctrica disponible tanto en velocidades del rotor sub-síncrona , así como en super-síncrona, dependiendo de la velocidad del viento, y (ii) la producción total de un DFIG podría ser tan alta como la suma de la potencia de capacidad de carga del devanado del estator y el devanado del rotor, cuando el rotor es accionado a velocidades super-síncrona.")
94
Los convertidores electrónicos de potencia tienen que controlar adecuadamente la potencia real y balacear la potencia reactiva en ambas velocidades del rotor sub-síncrona y super-síncrona. Los convertidores de potencia electrónica en el DFIG están conectados a los terminales del rotor y manejan sólo el deslizamiento de potencia y su potencia nominal puede ser mucho menor que la de la potencia nominal de la máquina de inducción. Esto resulta en gran cantidad de ahorros en el coste de los convertidores de potencia electrónicos. Para potencia nominales menores, los generadores de inducción de jaula de ardilla (SCIG) con condensadores de auto-excitación podría ser una opción. Sin embargo, la máquina puede trabajar en el modo de generación, pero sólo en la velocidad súper-sincrónicos del rotor. Si el sistema es capaz de generar más de una amplia gama de diferentes velocidades del viento, entonces es esencial insertar un circuito convertidor-inversor, entre los terminales del estator y la red. En este caso, el control adecuado tiene que ser proporcionada por estos convertidores electrónicos de potencia que debe estar diseñado para la clasificación completa de la máquina de inducción.
 con condensadores de auto-excitación podría ser una opción. Sin embargo, la máquina puede trabajar en el modo de generación, pero sólo en la velocidad súper-sincrónicos del rotor. Si el sistema es capaz de generar más de una amplia gama de diferentes velocidades del viento, entonces es esencial insertar un circuito convertidor-inversor, entre los terminales del estator y la red. En este caso, el control adecuado tiene que ser proporcionada por estos convertidores electrónicos de potencia que debe estar diseñado para la clasificación completa de la máquina de inducción.")
95
La tendencia moderna en turbinas eólicas es el uso de PMSG como un accionamiento directo (sin caja de engranes), especialmente en el entorno de generación distribuida (Spooner y Williamson, 1996). La gran ventaja de usar PMSG es que no hay necesidad de suministrar excitación de DC al rotor y que puede ser construido con gran número de polos de modo que incluso a bajas condiciones de velocidad del viento, 50 Hz se puede generar sin engranajes. Sin embargo, si el generador tiene que producir electricidad para variar la velocidad del viento, un circuito convertidor-inversor tiene que ser insertado entre los terminales del estator y la carga. La potencia nominal de estos convertidores electrónicos de potencia debe ser la misma que la de los PMSG. Controles apropiados tienen que ser proporcionados por los circuitos electrónicos de potencia para regular la frecuencia y el voltaje y también para mantener el factor de potencia del generador cercano a la unidad. Los controladores electrónicos de potencia también ayuda en la consecución de MPPT para diferentes condiciones de velocidad del viento.

96
6.5.4 Cargas Como se mencionó anteriormente, las cargas se han clasificado en tres tipos de acuerdo con sus prioridades. Las cargas pueden ser cargas pasivas como la iluminación y calefacción, y pueden ser cargas activas consistentes en unidades industriales, ya que pueden ser cargas no lineales ricas en armónicos tales como rectificador realimentados, motores de corriente directa, bombillas fluorescentes con balastos electrónicos o los sistemas de suministro de energía para computadoras u otros sistemas electrónicos de uso médico. Dependiendo de los estudios que se llevan a cabo para el sistema, las cargas pueden ser modeladas adecuadamente. Si simples cargas domésticas tienen que ser modeladas, están representadas por una potencia de carga agrupada constante. Si la calidad de energía a nivel de distribución tiene que ser estudiado para el tipo de unidad industrial de cargas, un modelo detallado tiene que ser adoptado. El generador debe estar en una posición para suministrar todas estas cargas y todavía mantener un factor de potencia unidad. Esto se hace posible mediante el uso de acondicionadores de calidad de energía.

97
6.5.5 BESS El BESS consta de un convertidor de potencia electrónico bidireccional, una impedancia de limitación de corriente y un banco de baterías. La tensión nominal y la capacidad en amperios-hora de la batería son los que deciden sobre la base de las variaciones cronológicas de la velocidad del viento y la carga. Además, las tasas de carga-descarga de la tecnología de la batería elegido debe ser capaz de hacer frente a las variaciones reales cronológicos en la velocidad del viento y la carga conectada. La tecnología de baterías está siendo constantemente investigada y mejorada para aumentar la densidad de energía y reducir el tiempo de carga. Las tecnologías que se utilizan comúnmente son de plomo-ácido y baterías de níquel-cadmio. Pero estos dos tienen densidades de energía del orden de 0,05 kWh/litro y 0,1 kWh/litro, respectivamente. Aunque la batería de níquel-cadmio es tres veces más cara que la batería de plomo-ácido, tiene una capacidad de almacenamiento mejor que la primera. De baterías zinc-plata están también disponibles en el mercado que son muy caras, pero su densidad de energía es comparable a la de baterías de níquel-cadmio. Su velocidad de carga parece ser mejor que las otras tecnologías de batería (dos Freris, 1990).
.")
98
6.6 Estrategias de control para sistemas de generación eólico-diesel
En los sistemas de generación eólico-diesel, el objetivo principal es el uso la moderación del uso del combustible, a pesar de las condiciones de velocidad variable del viento, y cumplir los requisitos esenciales de la demanda de carga. Para este propósito, una adecuada BESS nominal debe ser instalada de manera que cualquier déficit en la demanda puede satisfacerse por esta unidad de almacenamiento. Así, el sistema BESS tiene que estar conectado al generador por un convertidor bidireccional y la estrategia de control apropiada tiene que ser adoptado para el control de este convertidor de potencia electrónico. Diferentes tipos de generadores se utilizan en los WECS requieren diferentes tipos de estrategias de control. Por ejemplo, si un DFIG se utiliza con un requisito de control sólo sobre la potencia real, entonces una configuración de enlace de corriente con tiristor-rectificador e inversor puede ser utilizado. Si es necesario tener control sobre ambos potencias (real y reactiva) del generador, entonces se emplean convertidores de fuente de tensión.
 del generador, entonces se emplean convertidores de fuente de tensión.")
99
6.6.1 PMSG control con diodos rectifi er y el chopper
El diagrama de bloques de un PMSG con un diodo rectificador, una puerta de apagado (GTO) un chopper de tiristores y un inversor se muestran en la fig. 6,2. La PMSG está acoplado a la turbina de viento y su frecuencia variable de salida trifásica se rectifica con la ayuda de un diodo rectificador. Debido a las variaciones en la velocidad del viento, la magnitud de la tensión de salida y la frecuencia de la PMSG cambiará. Esto dará lugar a variaciones en la salida del diodo rectificador que tiene que ser impulsada o escalonada hacia abajo para mantener la tensión del circuito de DC en los terminales de entrada del inversor a un valor preestablecido. Este voltaje de DC se convierte en una frecuencia fija (50 Hz) trifásica sinusoidal por medio inversor de un ancho de pulso sinusoidal modulado(SPWM sinusoidal pulse width modulated) para alimentar la carga que requiere con voltaje en tres fases. El la razón de contro del convertidor DC-DC está directamente relacionada con la velocidad del viento, por lo que se puede ajustar para lograr MPPT. Los esquemas de control para chopper y el inversor se muestra en la figura. 6,3. La relación de trabajo del chopper se ajusta de modo que la máquina se ajusta a su par electromagnético para la capacidad de entrega de potencia máxima para una velocidad del viento de modo que la razón de velocidad de la punta de la turbina de viento es modificado para lograr MPPT (Ohyama et al., 2007).
 un chopper de tiristores y un inversor se muestran en la fig. 6,2. La PMSG está acoplado a la turbina de viento y su frecuencia variable de salida trifásica se rectifica con la ayuda de un diodo rectificador. Debido a las variaciones en la velocidad del viento, la magnitud de la tensión de salida y la frecuencia de la PMSG cambiará. Esto dará lugar a variaciones en la salida del diodo rectificador que tiene que ser impulsada o escalonada hacia abajo para mantener la tensión del circuito de DC en los terminales de entrada del inversor a un valor preestablecido. Este voltaje de DC se convierte en una frecuencia fija (50 Hz) trifásica sinusoidal por medio inversor de un ancho de pulso sinusoidal modulado(SPWM sinusoidal pulse width modulated) para alimentar la carga que requiere con voltaje en tres fases. El la razón de contro del convertidor DC-DC está directamente relacionada con la velocidad del viento, por lo que se puede ajustar para lograr MPPT. Los esquemas de control para chopper y el inversor se muestra en la figura. 6,3. La relación de trabajo del chopper se ajusta de modo que la máquina se ajusta a su par electromagnético para la capacidad de entrega de potencia máxima para una velocidad del viento de modo que la razón de velocidad de la punta de la turbina de viento es modificado para lograr MPPT (Ohyama et al., 2007).")
102
6.6.2 PMSG control con convertidores de fuente de voltaje
Si bien la utilización de un diodo rectificador y el chopper como se mencionó en la sección anterior, el rectificador formará corrientes con armónicos debido a la presencia del chopper y el filtro de capacitivo en sus terminales de salida de DC. Este problema podría ser eliminada si dos convertidores de fuente de voltaje se utilizan en cascada, una en el lado de la máquina y otro en el lado de carga. Tal esquema se muestra en la fig. 6,4. Este esquema se denomina como un régimen de tensión ligado ya que la entrada y convertidores de salida están conectados a través de un condensador cuya tensión se mantiene constante mediante el control de los pulsos de disparo para el convertidor de carga lateral (Chinchilla et al., 2006). Los esquemas de control tanto para el lado de la máquina y convertidores del lado de la carga se muestra en la figura. 6,5. El convertidor del lado de máquina se controla de tal manera que se consigue MPPT para velocidades del viento variables en el intervalo completo desde velocidad de inicio a la velocidad nominal después de lo cual el control de ángulo de paso se activa.
. Los esquemas de control tanto para el lado de la máquina y convertidores del lado de la carga se muestra en la figura. 6,5. El convertidor del lado de máquina se controla de tal manera que se consigue MPPT para velocidades del viento variables en el intervalo completo desde velocidad de inicio a la velocidad nominal después de lo cual el control de ángulo de paso se activa.")
105
6.6.3 Los esquemas de control para generadores de inducción
El DFIG así como SCIG se utilizan comúnmente para los sistemas de conversión de energía eólica debido a su capacidad de funcionar con velocidades variables de la turbina. La principal ventaja de DFIG es que puede alimentar energía a la red o a la carga, tanto desde el estator y de los lados del rotor. El lado del estator se puede conectar a la carga directamente, pero el voltaje del rotor está en frecuencia de deslizamiento tiene que ser convertido a la frecuencia de la red por un convertidor en cascada de corriente o voltaje ligada. Los valores nominales de estos convertidores es menor y corresponderá a la potencia de deslizamiento; por lo que resulta en un ahorro importante en el costo de los convertidores. Pero, los convertidores en SCIGs, tienen un valor nominal a plena carga de la máquina. Si la máquina tiene que ser operado sólo sobre una pequeña gama de velocidades, es decir, de la velocidad síncrona (ωs) a (1 + Smax) donde Smax = es deslizamiento en el par, entonces no hay necesidad de utilizar una combinación convertidor-inversor en el terminales del estator de la SCIG antes de conectarlo a la red o a la carga. Si el SCIG tiene que operar en un rango más amplio de la velocidad del viento, se vuelve absolutamente necesario conectarlo a la red o la carga a través de una convertidor-inversor en cascada.
 a (1 + Smax) donde Smax = es deslizamiento en el par, entonces no hay necesidad de utilizar una combinación convertidor-inversor en el terminales del estator de la SCIG antes de conectarlo a la red o a la carga. Si el SCIG tiene que operar en un rango más amplio de la velocidad del viento, se vuelve absolutamente necesario conectarlo a la red o la carga a través de una convertidor-inversor en cascada.")
106
Control de DFIG usando convertidores de corriente vinculados
El convertidor en cascada de corriente para el control DFIG se muestra en la fig. 6,6. Como este utiliza convertidores con tiristores en el lado del rotor, así como en el lado de carga, no hay posibilidad de controlar la potencia reactiva. Pero el control de potencia real se puede lograr con éxito. Este controlador de corriente ligada puede ser operado con éxito sólo para el funcionamiento como motor sub-síncrono y para el generador en actividad super-sincrónica. Por ejemplo, si la máquina está funcionando en modo de motor sub-sincrónico, el convertidor lado del rotor se opera a un ángulo de retardo inferior a 90 °, es decir que funcionará como un rectificador.

108
Control DFIG mediante convertidores de tensión vinculados
Si el DFIG tiene que ser operado en los cuatro cuadrantes de operación, motor y generador sub-síncrono, así como motor y generador super-sincrónico, es esencial utilizar convertidores de tensión ligados en sus terminales del rotor como se muestra en la fig. 6,7. Cuando la máquina está funcionando en modo de generación sub-síncrona, la velocidad del viento será baja, por lo que algunos potencia de deslizamiento se alimenta al rotor a través de la combinación convertidor-inversor. Tanto la potencia mecánica alimentada por la turbina eólica y la energía eléctrica alimentada por los convertidores para el rotor en forma de potencia de deslizamiento se convierte en energía eléctrica que se alimenta a la red a través de los terminales del estator. Por otro lado, cuando la velocidad del viento es alta, la máquina estará operando en el modo de generación super-sincrónico, en el que la potencia de deslizamiento fluye desde los terminales del rotor con la ayuda de los convertidores de potencia electrónicos para la carga / red. Al mismo tiempo, el estator también se alimenta la energía eléctrica generada a la carga / red.

110
El control de SCIG El SCIG puede estar vinculadar a la red / carga directamente, si se está operando dentro de un pequeño rango de valores de velocidad del viento. Este generará una tensión y corriente de frecuencia variable si se está operando en rangos amplios de velocidad de la turbina de viento. Esto tiene que ser convertida en tensión y frecuencia de 50 Hz o 60 Hz antes de ser alimentada a la carga. Esto requiere una combinación de convertidor-inversor para ser conectado en los bornes del estator. El esquema se muestra en la fig. 6,8. El control de este es similar a la del esquema discutido anteriormente para los convertidores de voltaje-enlazados para PMSG.

112
6.6.4 Control de las unidades de almacenamiento de energía
La BESS considera que aquí es un sistema de baterías conectado al bus común que acopla os terminales de la DG y el generador en la WECS. El BESS está conectado a este bus por medio de un convertidor electrónico de potencia bidireccional como se muestra en la fig. 6,1. El control de la unidad BESS se muestra en la fig. 6,9. El control de potencia real se consigue por medio de controlar la componente de eje directo de corriente del convertidor electrónico de potencia y el control de potencia reactiva es por medio de la componente en cuadratura eje de la corriente. Las tres corrientes de fase reales de este convertidor de potencia se convierten en componentes ejes directos y en cuadratura de las corrientes. La diferencia entre la potencia total generada por el sistema de viento-diesel y la demanda de potencia desde el lado de carga se calcula y esta es la señal de entrada a la unidad de control de la BESS. Esto se hace pasar a través de un controlador proporcional-integral (PI) para calcular la componente de eje directo de la corriente para el convertidor de potencia electrónico. La componente del eje de cuadratura de la corriente es, objeto de la base en el factor de potencia deseado. Las señales de disparo de los dispositivos en el convertidor electrónico de potencia son generados por el controlador de carga, basado en la diferencia entre los valores de referencia de Id e Iq y los valores reales Id e Iq del convertidor, respectivamente. Vale la pena señalar que este convertidor es capaz de actuar como un rectificador o un inversor.
 para calcular la componente de eje directo de la corriente para el convertidor de potencia electrónico. La componente del eje de cuadratura de la corriente es, objeto de la base en el factor de potencia deseado. Las señales de disparo de los dispositivos en el convertidor electrónico de potencia son generados por el controlador de carga, basado en la diferencia entre los valores de referencia de Id e Iq y los valores reales Id e Iq del convertidor, respectivamente. Vale la pena señalar que este convertidor es capaz de actuar como un rectificador o un inversor.")
114
6.7 Modelización y simulación de sistemas eólico-diesel
Un modelo desarrollado en el entorno MATLAB / Simulink para un sistema eólico-diesel-BESS se muestra en la figura. 6,10. Para el sistema aquí en estudio de simulación, el dimensionamiento de los diversos componentes se ha hecho como sigue: La velocidad media del viento considerado es 9,5 m/s. La carga de máxima prioridad que deben cumplir se considera que es de 30 kW. La turbina eólica debe ser capaz de generar esta potencia requerida de 30 kW a la velocidad media del viento. Para este propósito, el diámetro del rotor de la turbina eólica puede ser calculado mediante la utilización de la ecuación (6,1) como: 'D' es el diámetro del área barrido. Entonces, el valor de D es de 14,4 m. Debe haber espacio suficiente, con una distancia razonable en la vertical para instalar un aerogenerador.
 como: D es el diámetro del área barrido. Entonces, el valor de D es de 14,4 m. Debe haber espacio suficiente, con una distancia razonable en la vertical para instalar un aerogenerador.")
116
Para el cálculo del valor nominal de la batería, los siguientes cálculos se puede hacer. La carga se suministra con un voltaje de 3 fases de 240 V de CA (línea a línea). Cuando se convierte en corriente continua utilizando un rectificador PWM la salida de DC será de aproximadamente 250 V. Para una carga de 30 kW para ser suministrada por una batería a 250 V con una duración de una hora, la capacidad en Ah de la batería a 250 V debe ser de 120. Inicialmente, la batería cargará a corriente constante y, posteriormente, para mantener el voltaje de la batería en el valor nominal, pasará a carga de voltaje constante. En el desempeño a través del inversor PWM para cumplir con la carga de alta prioridad durante condiciones de baja velocidad del viento, puede dar un tiempo de respaldo hasta un máximo de 1 h, mientras se alimenta la carga de 30 kW. Cuando la carga de prioridad media de 25 kW también se enciende, la unidad de generación de energía eólica por sí sola no será capaz de satisfacer la demanda de carga completa de 55 kW, en cuyo caso el motor diesel tiene que estar encendido. Si la carga pasa a ser menor que la generación total, entonces la batería se cargará. El valor nominal del sistema DG también se considera de 30 kW, de modo que incluso a 40% de la carga que sería capaz de generar aproximadamente 12 kW. Cuando la carga de prioridad más baja de alrededor de 20 kW es también conectada, entonces el generador de viento, el generador de diesel (DG) y BESS en conjunto tendrán que cumplir con la carga total.
 y BESS en conjunto tendrán que cumplir con la carga total.")
117
En el modelo creado por el sistema de viento-diesel, la carga de máxima prioridad en sí se ha tomado en dos partes que consta de 11 kW y kW 16, respectivamente. La energía eólica utiliza un sistema de conversión de PMSG de alrededor de potencia nominal de 27 kW, con su tensión en los bornes de cerca de 230 V (línea a línea), cuando la velocidad del viento está en el valor nominal de 10 m/s. A esta velocidad de viento del generador funciona a la velocidad nominal de 3,000 rpm. Si hay cambios de velocidad del viento, el algoritmo MPPT ajusta la velocidad del generador mediante el ajuste del par electromagnético desarrollado o el componente de eje en cuadratura de la corriente del generador. Esto da como resultado una variación en la magnitud y frecuencia de la tensión generada por la máquina y por lo tanto, se convierte en DC y posteriormente en CA de una frecuencia específica mediante la ayuda de un inversor antes de ser alimentada a la carga. Como la salida del inversor se encuentra con modulación por ancho de pulsos: (PWM), tiene que ser convertida en una tensión senoidal mediante una interfase de unos pocos milihenrios (mH) de inductancia.
, cuando la velocidad del viento está en el valor nominal de 10 m/s. A esta velocidad de viento del generador funciona a la velocidad nominal de 3,000 rpm. Si hay cambios de velocidad del viento, el algoritmo MPPT ajusta la velocidad del generador mediante el ajuste del par electromagnético desarrollado o el componente de eje en cuadratura de la corriente del generador. Esto da como resultado una variación en la magnitud y frecuencia de la tensión generada por la máquina y por lo tanto, se convierte en DC y posteriormente en CA de una frecuencia específica mediante la ayuda de un inversor antes de ser alimentada a la carga. Como la salida del inversor se encuentra con modulación por ancho de pulsos: (PWM), tiene que ser convertida en una tensión senoidal mediante una interfase de unos pocos milihenrios (mH) de inductancia..")
118
El valor nominal del generador diesel empleado también se elige de 30 kW para que coincida con la suma de cargas prioritarias 2 y 3. El motor diesel es controlado por un mecanismo regulador. Se acopla a un generador síncrono normal (campo bobinado) cuya salida es perfectamente sinusoidal. Los dos generadores el DG y el del WECS son conectados en paralelo para alimentar las cargas desde un bus común. El cargador de baterías está conectado al mismo bus donde se conecta la carga. El cargador de batería tiene la capacidad de permitir el flujo de potencia bidireccional. Así pues, si la velocidad del viento es baja y la potencia generada es menor que la demanda de carga, la batería se descargue para suministrar la potencia adicional requerida por la carga. Por otro lado, si la velocidad del viento es lo suficientemente alta y la carga es baja, entonces la batería se cargará. Un conjunto de simulaciones han llevado a cabo en este sistema y los resultados se presentan a continuación
 cuya salida es perfectamente sinusoidal. Los dos generadores el DG y el del WECS son conectados en paralelo para alimentar las cargas desde un bus común. El cargador de baterías está conectado al mismo bus donde se conecta la carga. El cargador de batería tiene la capacidad de permitir el flujo de potencia bidireccional. Así pues, si la velocidad del viento es baja y la potencia generada es menor que la demanda de carga, la batería se descargue para suministrar la potencia adicional requerida por la carga. Por otro lado, si la velocidad del viento es lo suficientemente alta y la carga es baja, entonces la batería se cargará. Un conjunto de simulaciones han llevado a cabo en este sistema y los resultados se presentan a continuación.")
121
6.8 Conclusiones Los HWDES están adquiriendo una gran importancia debido a su idoneidad tanto desde el punto de vista económico y técnico especialmente para cumplir con las cargas en ubicaciones remotas, tales como las zonas rurales alejadas de la red de alta tensión, las zonas montañosas e islas. Se han presentado una descripción de los HWDES donde se ha incluido los aspectos más destacados en el diseño de estos sistemas, diferentes tipos de generadores como PMSG y DFIG utilizado para WECS y las estrategias de control adoptadas en ellos. Se han presentado los aspectos más destacados de los modelos y algunos resultados de simulación típicas El factor clave en el control de un sistema de viento híbrido diesel es reducir al mínimo el consumo de combustible diesel, manteniendo simultáneamente la potencia de salida del motor diesel por lo menos en un valor mínimo permisible específicamente cuando se está ejecutando y al mismo tiempo limitar su frecuencia de encendido-apagado dentro del rango permitido tanto por la variación en la velocidad del viento y las condiciones de la demanda de carga.

122
Sería ventajoso si el generador de la energía eólica podría ser controlada de tal manera como para lograr la captura máxima potencia por el rotor de la turbina eólica en diversas condiciones de velocidad del viento. Para este propósito, varios esquemas de control se han sugerido en la literatura y algunos de ellos han sido discutidos. Teniendo en cuenta que la generación de energía eólica es una área en crecimiento y fértil para la investigación, es difícil presentar todos los aspectos de este tema. La idea era cubrir la mayor parte de los aspectos más destacados para que posteriormente se pueda discutir sobre esto más adelante.

123
6.9 Las tendencias futuras
Los futuros sistemas de energía eléctrica se puede visualizar como una combinación de entidades que tienen dos estructuras distintas, un conjunto formado por las plantas de energía de alta eficiencia térmica de carbón, tanto así como turbo-gas que operan con casi cero emisiones de gases de efecto invernadero, las plantas de energía nuclear y principales de almacenamiento de tipo hidro-plantas de energía interconectados por líneas de alta tensión de transmisión y el otro juego que consiste en la utilización de los sistemas de Generación Distribuida con fuentes renovables como la eólica, solar, hidroeléctrica y residuos agro industriales, interconectados a través de líneas madia/baja tensión de distribución y de alimentación a cargas locales. El sistema eólico-diesel, que es el tema de este capítulo, corresponde a la segunda categoría. Aunque estos sistemas son normalmente llamados sistemas eólico-diésel, también pueden utilizar los biocombustibles, producidos a partir de los residuos disponibles localmente o plantaciones energéticas se producen localmente. Cada vez más de este tipo de sistema se espera que se instala en el futuro debido a que apenas contamina la atmósfera, mantiene las pérdidas de transmisión en un nivel bajo debido a la proximidad de las cargas a estos generadores. Por cierto esto también se convierte en un método eficaz para la eliminación de los residuos generados.

124
Cuando muchos de estos recursos distribuidos son operados en conjunto, se hace necesario abordar una serie de cuestiones técnicas, como el óptimo funcionamiento de estos sistemas, la coordinación de los sistemas de protección de la generación distribuida, la estabilidad de estos sistemas y la calidad de la energía generada por estos sistemas. El control coordinado HWDES junto con la unidad de almacenamiento de energía es una tarea difícil. Los controladores para estos sistemas tienen que ser diseñadas no sólo para funcionar correctamente y de forma estable en el estado de equilibrio para la energía eólica y diversas condiciones de carga que se plantean en el sistema, sino que también debe ser capaz de dar una buena respuesta dinámica, mientras que al pasar de un estado estacionario a otro estado. Para asegurar esto, ya que estos sistemas evolucionan, se puede pensar en un sistema de control más sofisticado, que será capaz de ajustar sus parámetros de control on-line con ajuste automático, controladores de lógica difusa o controladores neuronales difusos. Algunas de ellas se han intentado en la literatura (Ko et al, 2003;. Mufti et al, 1996.), Aunque su aplicación real de estos algoritmos inteligentes en WECS siguen siendo raros.
, Aunque su aplicación real de estos algoritmos inteligentes en WECS siguen siendo raros.")
125
6.10 Referencias • Barton J P and Infi eld D G, ‘Energy storage and its use with intermittent renewable energy’, IEEE Transaction on EC, Vol. 19, No. 2, June 2004, Pages 441–448. • Borowy B S and Salameh Z M, ‘Dynamic response of a stand-alone wind energy conversion system with battery energy storage to a wind gust’, IEEE Transactions on EC, Vol. 12, No. 1, March 1997, Pages 73–78. • Chiang S, Huang S C and Liaw C M, ‘Three-phase multi functional battery energy storage system’, IEE Proceedings on EPA, Vol. 142, No. 4 July 1995, Pages 275–289. • Chinchilla M, Arnaltes S and Burgos J C, ‘Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid’, IEEE Transactions on EC, Vol. 21, Issue 1, March 2006, Pages 130–135. • Datta R and Ranganathan V T, ‘Variable speed wind power generation using doubly fed wound rotor induction machine – A comparison with alternative schemes’,IEEE Transactions on EC, Vol. 17, No. 3, Sept 2002, Pages 414–421. • Datta R and Ranganathan V T, ‘A method of tracking peak power points for a variable speed wind energy conversion system’, IEEE Transactions on EC, Vol. 18, No. 1, March 2003, Pages 163–168. • Freris L L, Wind Energy Conversion Systems, Prentice Hall International (UK) Ltd,1990.
 Ltd,1990.")
126
• Jenkins N, Allan R, Crossley P, Kirschen D and Strbac G, Embedded Generation, IEE Press, 2000.
• Kaldellis J K and Kavadias K A, ‘Cost–benefi t analysis of remote hybrid wind–diesel power stations: Case study Aegean Sea islands’, Energy Policy, Volume 35, Issue 3, March 2007, Pages 1525–1538. • Kaldellis J K, Kondili E and Filios A, ‘Sizing a hybrid wind–diesel stand-alone system on the basis of minimum long-term electricity production cost’, Applied Energy, Volume 83, Issue 12, December 2006, Pages 1384–1403. • Kaldellis J K, Zafi rakis D and Kavadias K, ‘Techno-economic comparison of energy storage systems for island autonomous electrical networks’, Renewable and Sustainable Energy Reviews, Volume 13, Issue 2, February 2009, Pages 378–392. • Ko H S, Niimura T and Lee K Y, ‘An intelligent controller for a remote wind-diesel power system – Design and dynamic performance analysis’, Proceedings of thePES General Meeting, Vol. 4, July 2003. • Lin C E, Shiao Y S, Huang C L and Sung P S, ‘A real and reactive power control approach for battery energy storage system’, IEEE Transactions on Power Systems, Vol. 7, No. 3, August 1992, Pages 1132– Masters G M, Renewable and Effi cient Electric Power Systems, Wiley-Interscience, 2004. • McKenna E and Olsen T L, Performance and Economics of a Wind–Diesel Hybrid Energy System, National Renewable Energy Laboratory,

127
• Mufti M, Balasubramanian R and Tripathy S C, ‘Self-tuning control of wind–diesel power systems’, Proceedings of the IEEE Conference PEDES, 1996, Vol. 1, Pages 258–264. Mutoh N and Nagasawa A, ‘A maximum power point tracking control method suitable for compact wind power generators’, Proceedings of the IEEE Power Electronics Specialists Conference (PESC), 18–22 June, 2006, Pages 1–7. • Ohyama K, Arinaga S and Yamashita Y, ‘Modeling and simulation of variable speed wind generator system using boost converter of permanent magnet synchronous generator’, European Conference on PowerElectronics and Applications, 2–5 Sept 2007 Pages 1–9. • Pena R, Clare J C and Asher G M, ‘Doubly fed induction generator using back to back PWM converters and its application to variable-speed wind-energy generation’,IEE Proceedings on EPA, Vol. 143, No. 3, May 1996, Pages 231–241. • Richardson R D and McNerney G M, ‘wind energy systems’, Proceedings of the IEEE, Vol. 81, Issue 3, March 1993, Pages 378–389. • Spooner E and Williamson A C, ‘Direct coupled permanent magnet generators for wind turbine applications’, IEE Proceedings on EPA, Vol. 143, No. 1, January 1996, Pages 1–8. • Wai R J, Lin C Y and Chang Y R, ‘Novel maximum power extraction algorithm for PMSG wind generation system’, IET EPA, Vol. 1 (2), 2007, Pages 275–283.
![]()
Presentaciones similares