Descargar la presentación
La descarga está en progreso. Por favor, espere

1
SERIES DE TIEMPO INTEGRANTES :

2
Definición Se llama Series de Tiempo a un conjunto de observaciones sobre valores que toma una variable (cuantitativa) en diferentes momentos del tiempo.
 en diferentes momentos del tiempo.")
3
¿Para que se utilizan las series de Tiempo?
Hoy en día diversas organizaciones requieren conocer el comportamiento futuro de ciertos fenómenos con el fin de planificar, prevenir,es decir, se utilizan para predecir lo que ocurrirá con una variable en el futuro a partir del comportamiento de esa variable en el pasado.

4
Aplicaciones En las organizaciones es de mucha utilidad en predicciones a corto y mediano plazo, por ejemplo ver que ocurriría con la demanda de un cierto producto, las ventas a futuro, decisiones sobre inventario, insumos, etc.... No así para el diseño de un proceso productivo ya que no se disponen de datos históricos y se trata de un proyecto a largo plazo

5
Selección de un modelo El horizonte de tiempo para realizar la proyección. La disponibilidad de los datos. La exactitud requerida. El tamaño del presupuesto de proyección. La disponibilidad de personal calificado.

6
Modelos de series de tiempo
Método de proyección Cantidad de datos históricos Patrón de los datos Horizonte de proyección Tiempo de preparación Antecedentes del personal Ajuste exponencial simple 5 a 10 observaciones para fijar la ponderación Los datos deben ser estacionarios Corto Poca sofisticación Ajuste exponencial de Holt 10 a 15 observaciones para fijar la ponderación Tendencias pero no estacionalidad Corto a mediano Ligera sofisticación Ajuste exponencial de Winter Por lo menos 4 ò 5 observaciones por trimestre Tendencias y estacionalidad Sofisticación moderada Modelos de la tendencia de regresión 10 a 20 observaciones para la estacionalidad, por lo menos 5 por trimestre Modelos de regresión causal 10 observaciones por variable independiente Puede manejar patrones complejos Corto , mediano o largo Largo tiempo para el desarrollo , corto para la puesta en ejecución Sofisticación considerable Descomposición de las series de tiempo Suficiente para ver 2 picos y simas Maneja patrones cíclicos y estacionales puede identificar los puntos críticos Corto tiempo para la moderación Box Jenkins 50 o mas observaciones Deben ser estacionarios o ser transformados en estacionarios Largo Alta sofisticación

7
Comportamiento de los Datos
Los datos se pueden comportar de diferentes formas a través del tiempo, puede que se presente una tendencia, un ciclo; no tener una forma definida o aleatoria, variaciones estacionales (anual, semestral, etc).
.")
8
Descomposición de los datos de series de tiempo

9
Tendencia

10
Estacionalidad Se dice que una serie de tiempo es estacionaria cuando el valor de su media, varianza y covarianza no varían Sistemáticamente en el tiempo.

11
Suavizado de una serie de tiempo
Cuando se analizan datos en donde los movimientos de la tendencia en la serie se ven confusos las variaciones de un año a otro, y no es fácil darse cuenta de si realmente existe en la serie algún efecto de la tendencia hacia arriba o hacia abajo.

12
Métodos de Predicción Los métodos mas utilizados en las series temporales son: Promedio móvil Suavización Exponencial Box - Jenkins

13
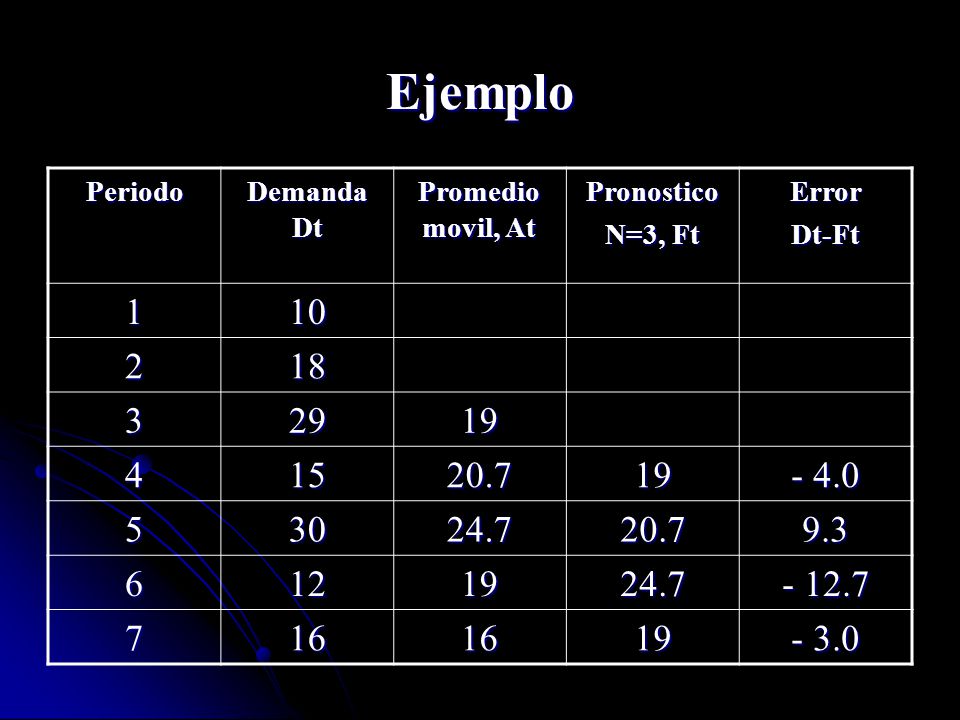
Promedio móvil Es el método de predicción mas simple, donde se selecciona un numero dado de periodos N, y se obtiene la media o promedio de la variable para los N periodos, permitiendo que el promedio se mueva conforme se observan los nuevos datos de la variable en cuestión.

14
Ejemplo Periodo Demanda Dt Promedio movil, At Pronostico N=3, Ft Error Dt-Ft 1 10 2 18 3 29 19 4 15 20.7 - 4.0 5 30 24.7 9.3 6 12 - 12.7 7 16 - 3.0
15
A t = D1+ D t D t-(N+1) N A t = F t Con t=7, N=3 F 8 = ( ) 3

16
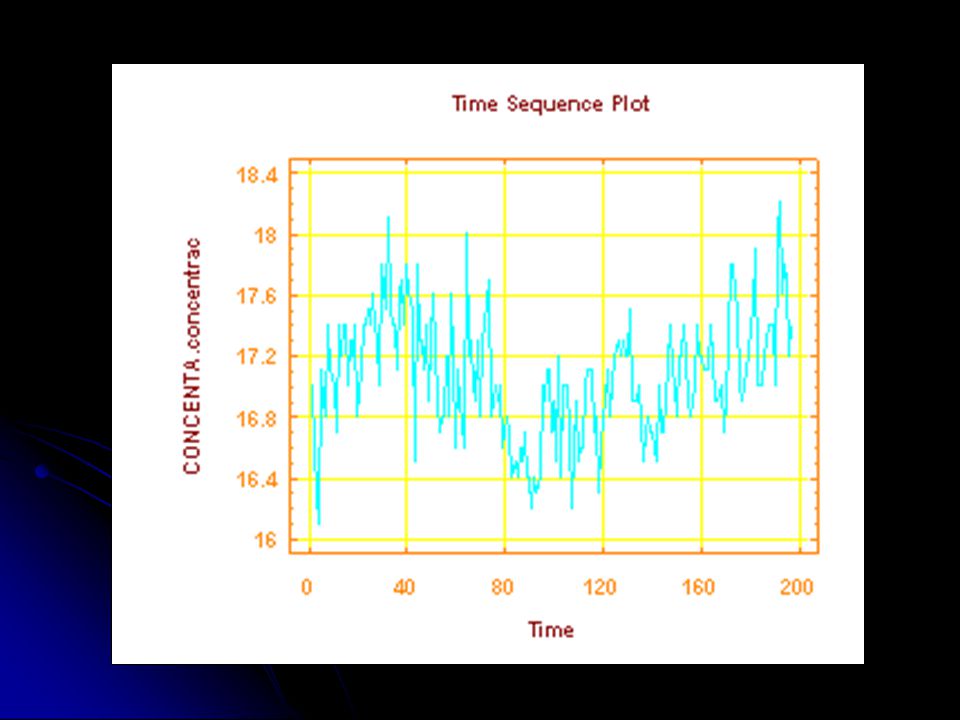
Grafico de una Serie de Tiempo
Mientras mas largo sea el periodo en que se hace el promedio, mas lenta es la respuesta ante los cambios a la demanda

17
Suavización Exponencial
Se basa en la idea de que es posible calcular un promedio nuevo a partir de un promedio anterior y también del ultimo dato observado. At = D t + (1-) F t At = Dt + (1-) At-1 0 < < 1
 F t. At = Dt + (1-) At-1. 0 < < 1.")
18
Ejemplo Periodo Demanda Dt 1 10 2 18 3 29 4 15 5 30 6 12 7 16 Pronostico= 0.1, Ft Error Dt-Ft 15 -5.0 14.5 3.5 14.85 14.15 16.26 -1.26 16.14 13.86 17.62 -5.52 16.97 -0.97

19
Para el periodo t+1, tenemos:
At = D t + (1-) F t Para el periodo t+1, tenemos: A8 = 0.1 (10)+ (1–0.1) 15 A8 = 14.5
 F t. Para el periodo t+1, tenemos: A8 = 0.1 (10)+ (1–0.1) 15. A8 =")
20
es la proporcion del peso que se da a la demanda nueva contra la que se da al promedio anterior.
Es decir, mientras mas grande es el valor de mas nos acercamos al valor de la demanda que se acaba de observar.....se le da mayor peso a las observaciones recientes que al promedio anterior.

21
Grafico

22
Box - Jenkins Box y Jenkins han desarrollado modelos estadísticos que tienen en cuenta la dependencia existente entre los datos. Cada observación en un momento dado es modelada en función de los valores anteriores. Se modela a través de ARIMA (Autorregresive Integrate Moving Average).
.")
23
METODOLOGIA DE BOX-JENKINS
Tiene solamente en cuenta la pauta de serie serie de tiempo en el pasado. Ignora la información de variables causales. Procedimiento técnicamente sofisticado de predicción de una variable. Utiliza la observación más reciente como valor inicial. Permite examinar el modelo más adecuado

24
METODOLOGIA DE BOX-JENKINS
Analiza errores recientes de pronósticos para seleccionar el ajuste apropiado para periodos futuros. Box-Jenkins es más apropiado para predicciones a largo plazo que para corto plazo. Extrae mucha información de la serie de tiempo, más que cualquier otro método.

25
Elección del modelo Existen tres tipos básicos de modelos a ser examinados Modelos autorregresivos (AR). Modelos de medias móviles (MA) Modelos mixtos autorregresivos-medias móviles (ARIMA)
 Modelos mixtos autorregresivos-medias móviles (ARIMA)")
26
Modelos autorregresivos AR(p).
Describe una clase particular de proceso en que las observaciones en un momento dado son predecibles a partir de las observaciones previas del proceso mas un termino de error.,el caso mas simple ARIMA (1,0,0) o AR(1). Yt = Ф1 Yt at
 o AR(1). Yt = Ф1 Yt-1 + at.")
27
Modelos de medias móviles MA(q)
También describe una serie de tiempo estacionaria.En este modelo el valor actual puede predecirse a partir de las componentes aleatorias de este momento y, en menor medida los impulsos aleatorios anteriores. ARIMA (0,0,1) o MA (1) Yt = at - V1 at-1
 o MA (1) Yt = at - V1 at-1.")
28
A R I M A Es un modelo que permite describir un valor como una funcion lineal de datos como una funcion lineal de datos anteriores y errores debidos al azar. Se analiza sobre una serie estacionaria y se necesitan como minimo 50 datos.

29
Autocorrelacion simple (ACF)
La autocorrelación muestra la asociación entre valores de la misma variable en diferentes periodos de tiempo(no aleatoria).
.")
30
Grafico

31
Autocorrelacion Parcial (PACF)
La autocorrelación parcial identifica la relación entre los valores actuales y los valores anteriores de la serie cronológica original.

32
Grafico

33
AR (1) Los procesos AR(1) se reconocen por una ACF infinita y una PACF que desaparece tras el primer retardo. Si los datos tienen media, es necesario especificar un termino constante.
 se reconocen por una ACF infinita y una PACF que desaparece tras el primer retardo. Si los datos tienen media, es necesario especificar un termino constante.")
34
Identificacion del modelo
Si la S.T presenta tendencia debemos transformarla mediante una diferenciación de orden d. ACF está mas ajustada que la PACF el modelo suele ser (0,d,q),por lo tanto se calcula MA. PACF está mas ajustada que la ACF el modelo suele ser (p,d,0),por lo tanto se calcula AR. Si ACF y PACF,estan igualmente ajustadas el modelo suele ser (p,d,q),por lo tanto se calculan AR y MA.
,por lo tanto se calcula MA. PACF está mas ajustada que la ACF el modelo suele ser (p,d,0),por lo tanto se calcula AR. Si ACF y PACF,estan igualmente ajustadas el modelo suele ser (p,d,q),por lo tanto se calculan AR y MA.")
35
AR (1)
")
36
MA(1) Los procesos MA(1) se reconocen por una PACF infinita y una ACF que desaparece tras el primer retardo. Si los datos tienen media, es necesario especificar un término constante.

37
MA(1)
")
38
AR(2) (I)
 (I)")
39
AR(2) (II)
 (II)")
40
MA (2)
")
42
Función de autocorrelacion

43
Función de autocorrelación
Para ver si la serie es o no estacionaria veamos el correlograma.Observamos que decrece lentamente, por lo que podemos decir que no hay estacionariedad (cuando el decrecimiento es más rápido la serie es estacionaria). Aplicamos un modelo en el que hay que diferenciar la serie y obtenemos el gráfico de la serie después de haber hecho una diferenciación no estacional.Se observa que la serie se ha estabilizado.
. Aplicamos un modelo en el que hay que diferenciar la serie y obtenemos el gráfico de la serie después de haber hecho una diferenciación no estacional.Se observa que la serie se ha estabilizado.")
44
Función de autocorrelacion

45
En el correlograma estimado con una diferenciación no estacional ya no aparece el decrecimiento.
Los valores que se salen fuera de las bandas son significativamente distintos de cero, pero simplemente por azar un 5% se sale fuera. . Vemos como corresponde a un modelo de medias móviles de orden uno en que no sabemos si tendrá termino constante.Se trata de un modelo ARIMA(0,1,1).
.")
46
La serie no tiene un nivel constante, se observa una tendencia creciente. Se ve claramente en el gráfico que hay una componente estacional. La amplitud de las oscilaciones crece con la tendencia.

47
FIN

48
Modelos mixtos autorregresivos-medias móviles (ARIMA)
Incluyen tanto términos autorregresivos como de medias móviles y se definen como ARMA (p,q) o ARIMA(p,0,q).Se representan por la ecuación:
 o ARIMA(p,0,q).Se representan por la ecuación:")
Presentaciones similares

: Extensiones y metodología Miguel Jerez y Sonia Sotoca Universidad Complutense de Madrid Marzo 2004.>")












 para Honduras, mediante modelos Econométricos, serie de tiempo y Pronostico.>")




