Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Betsabé González Yañez Eduardo González Olivares
Un modelo de depredación del tipo Leslie con respuesta funcional no-monotónica Betsabé González Yañez Eduardo González Olivares Grupo de Ecología Matemática Instituto de Matemáticas, Pontificia Universidad Católica de Valparaíso, Chile

2
La interacción depredador-presa es descrita por el sistema de
La interacción depredador-presa es descrita por el sistema de ecuaciones diferenciales del tipo Kolmogorov: Las singularidades del campo vectorial son (K,0) y los puntos determinados por la intersección de las isoclinas:
 y los. puntos determinados por la intersección de las isoclinas:")
3
la función es la respuesta funcional (función de consumo) Holling tipo IV cuya representación gráfica es:

4
Los parámetros tienen los siguientes significados:
r : Es la tasa intrínseca de crecimiento de las presas. K : Es la capacidad de soporte del medio ambiente. q : Es la tasa de consumo de los depredadores. a1/2: Cantidad de presas para el cual el efecto de depredación es máximo b : Es la tasa intrínseca de crecimiento de los depredadores. n : Es la medida de la calidad del alimento que provee la presa para la conversión de nacimientos de nuevos depredadores.

5
Para simplificar los cálculos hacemos cambios de variable y reescalamos el tiempo según la función :
donde y Quedando un sistema equivalente definido por el sistema:

6
Los puntos de equilibrio son : O(0,0) ; P1(1,0) ; Pe1 y Pe2
estos dos últimos están sobre las isoclinas La abscisa de dichos puntos satisfacen la siguiente ecuación :

7
Para las soluciones de la ecuación se tiene gráficamente:

8
La matriz Jacobiana del campo vectorial es:
donde :

9
RESULTADOS PRINCIPALES
Lema 1.- El conjunto es región de invarianza. Lema 2.- Para todo las singularidades O y P1 son puntos sillas.

10
Sea la solución que siempre existe en
Teorema 3.- Dada la expresión diremos que: 3.1) Existe un único punto de equilibro, Pe=(H,H) ssi T < 0 , siendo este: 3.11) Foco repulsor , rodeado de un cíclo límite si H(A+3H2-2H)+B(H2+A) < 0 3.12) Atractor global si H(A+3H2-2H)+B(H2+A) > 0
 Existe un único punto de equilibro, Pe=(H,H) ssi T < 0 , siendo este: 3.11) Foco repulsor , rodeado de un cíclo límite si. H(A+3H2-2H)+B(H2+A) < ) Atractor global si H(A+3H2-2H)+B(H2+A) > 0.")
12
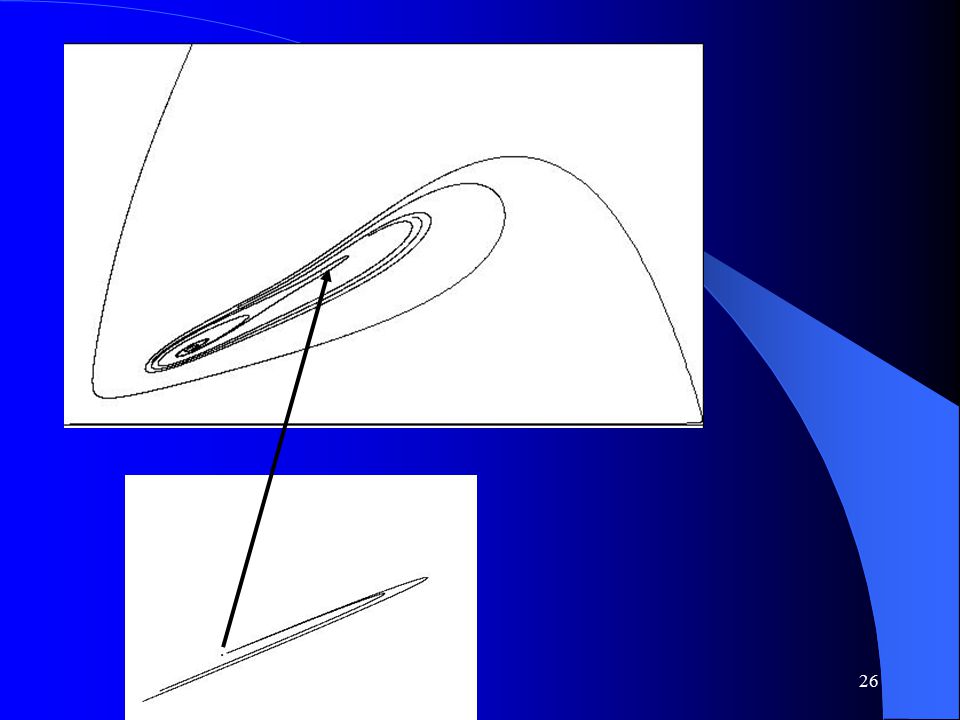
Además, computacionalmente hemos obtenido que para cierta condición de parámetros, el punto es atractor local, rodeado de dos ciclos límites, el interior inestable y el exterior estable.

13
3.2) En particular si A = y Q = ,
existe un único punto P = en el interior de la región siendo este: 3.21) Nodo atractor si B > 3.22) Nodo repulsor , rodeado de un cíclo límite , si B < debido al Teorema de Poicaré - Bendixon
 Nodo atractor si B > 3.22) Nodo repulsor , rodeado de un cíclo. límite , si B < debido al. Teorema de Poicaré - Bendixon.")
14
3.3) Asumiendo que T = 0, entonces existen dos singularidades
Pe= ( H , H ) y Pe2 = En este caso definiremos los siguientes subconjuntos de]0,1[x2+ : I : Región R1 definida por
 y Pe2 = En este caso definiremos los siguientes subconjuntos de]0,1[x2+ : I : Región R1 definida por.")
15
A=0.032 , B=1 , Q= Pe= ( 0.2 , 0.2 ) y Pe2 = ( 0.4 , 0.4)
 y Pe2 = ( 0.4 , 0.4)")
16
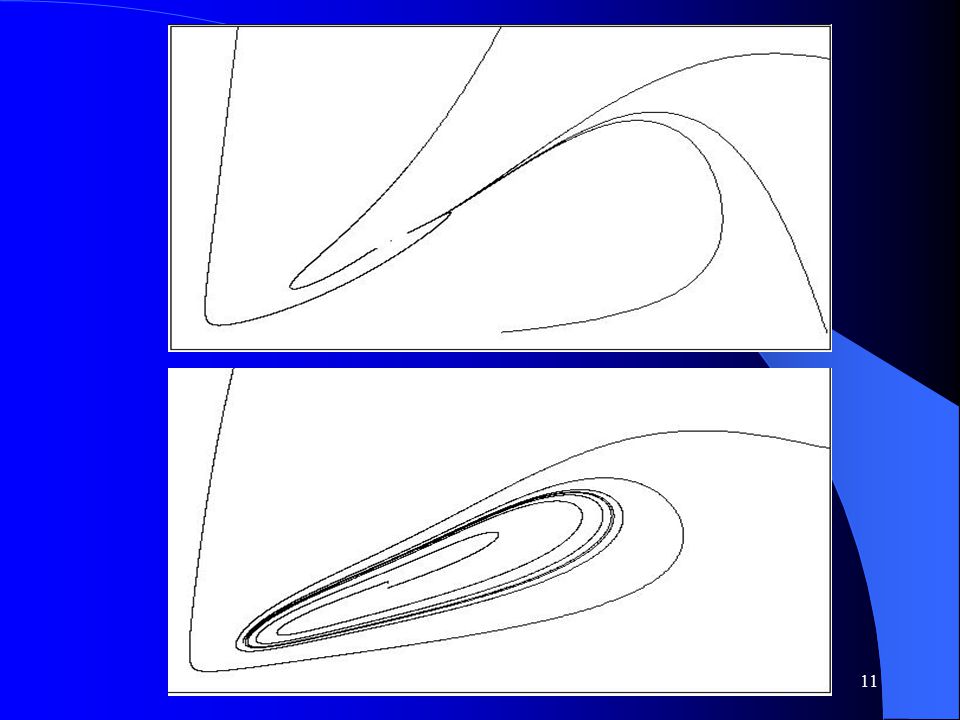
Teorema 4.- 4.1 ) Pe2= es nodo atractor. 4.2 ) Pe= ( H , H ) es: 4.21) Foco atractor si 4.22) Nodo atractor si Además existe una curva separatriz y, dependiendo de las C.I. , los -limite de las trayectorias serán
 Nodo atractor si. Además existe una curva separatriz y, dependiendo de las C.I. , los. -limite de las trayectorias serán.")
17
II. Región R2 definida por :

18
En esta región tenemos que :
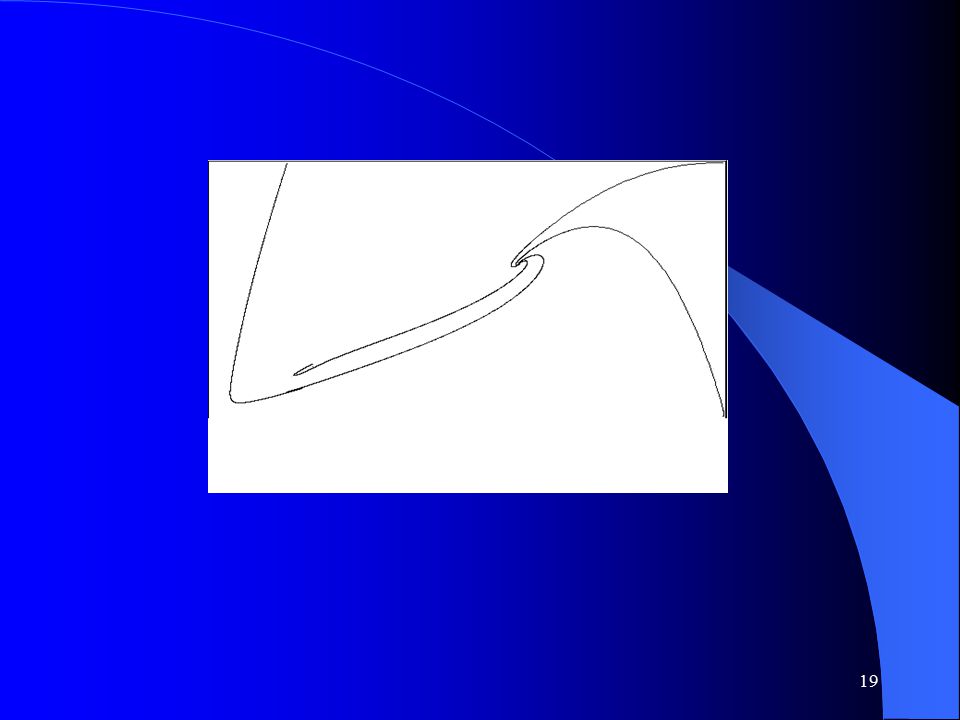
Teorema 5 5.1) Pe2 = es nodo repulsor. 5.2) Pe = ( H , H ) es foco atractor si 5.3) Pe= ( H , H ) es nodo atractor si: Más aún, existen valores de parámetros para los cuáles aparecen dos ciclos límites.
 Pe2 = es nodo repulsor. 5.2) Pe = ( H , H ) es foco atractor si. 5.3) Pe= ( H , H ) es nodo atractor si: Más aún, existen valores de parámetros para los cuáles aparecen dos ciclos límites.")
21
III. Región R3 definida por :

22
En esta región tenemos que:
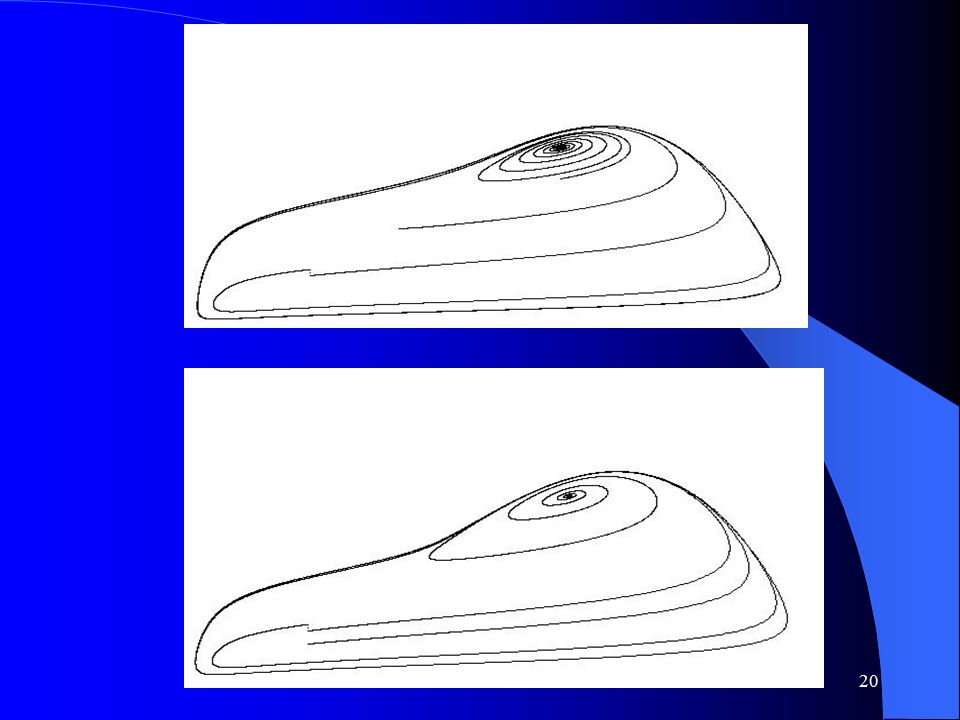
Teorema 6 6.1) Pe2 = es nodo repulsor. 6.2) Pe = es foco repulsor si . 6.3) Pe= es nodo repulsor si . Ambas singularidades estan rodeadas de un cíclo límite atractor ( Poincaré – Bendixon )
 Pe2 = es nodo repulsor. 6.2) Pe = es foco repulsor si . 6.3) Pe= es nodo repulsor si . Ambas singularidades estan rodeadas de un cíclo límite atractor. ( Poincaré – Bendixon )")
24
IV. Región R4 definida por :

25
En esta región tenemos que:
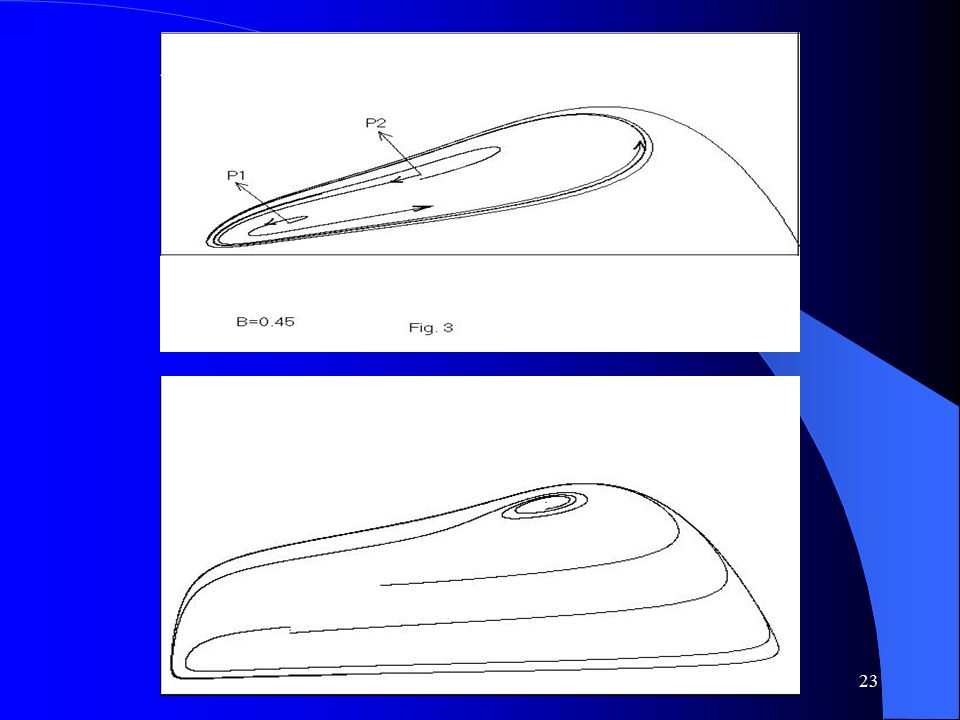
Teorema 7 7.1) Pe= ( H , H ) es foco repulsor. 7.2) Pe2 = es nodo atractor. Ambos rodeados por un único ciclo límite
 Pe= ( H , H ) es foco repulsor. 7.2) Pe2 = es nodo atractor. Ambos rodeados por un único ciclo límite.")
27
CONCLUSIONES En este modelo se han analizado solamente dos casos, cuando existe único o dos puntos de equilibrio al interior del primer cuadrante. En el segundo caso surge la existencia de separatrices, curva heteroclínica y cíclos limites que encierran a ambos puntos de equilibrio. Un resultado biológico importante es que para todo valor de parámetro ambas poblaciones siempre coexisten pues el (0,0) es siempre punto silla
 es siempre punto silla.")
28
Las poblaciones exhiben el fenómeno de biestabilidad porque pueden coexistir un cíclo límite estable (atractor) con un punto de equilibrio también estable. Sin embargo, para cierto valores de parámetros, el modelo es altamente sensible a las condiciones iniciales, lo que sucede cuando se tienen dos puntos de equilibrio atractores.( existencia de separatriz). Esto implica la alta dependencia en el modelo respecto a los tamaños iniciales de ambas poblaciones, para un cierto conjunto de parámetros. Para otro conjunto de parámetros existe un cíclo límite inestable que divide el comportamiento de las trayectorias , alguna de las cuales tienen como – límite el punto de equilibrio ( H,H) y otras tienden a un cíclo límite estable que rodea a ambos puntos de equilibrio.
. Esto implica la alta dependencia en el modelo respecto a los tamaños iniciales de ambas poblaciones, para un cierto conjunto de parámetros. Para otro conjunto de parámetros existe un cíclo límite inestable que divide el comportamiento de las trayectorias , alguna de las cuales tienen como – límite el punto de equilibrio ( H,H) y otras tienden a un cíclo límite estable que rodea a ambos puntos de equilibrio.")
29
Valparaíso saluda a Valdivia
Muchas Gracias

Presentaciones similares