Descargar la presentación
La descarga está en progreso. Por favor, espere

1
INTRODUCCIÓN AL ANÁLISIS BIOMECÁNICO
ALEJANDRO GÓMEZ RODAS PROFESIONAL EN CIENCIAS DEL DEPORTE Y LA RECREACIÓN ESPECIALISTA EN ACTIVIDAD FÍSICA Y SALUD FISIOTERAPEUTA Y KINESIÓLOGO

2
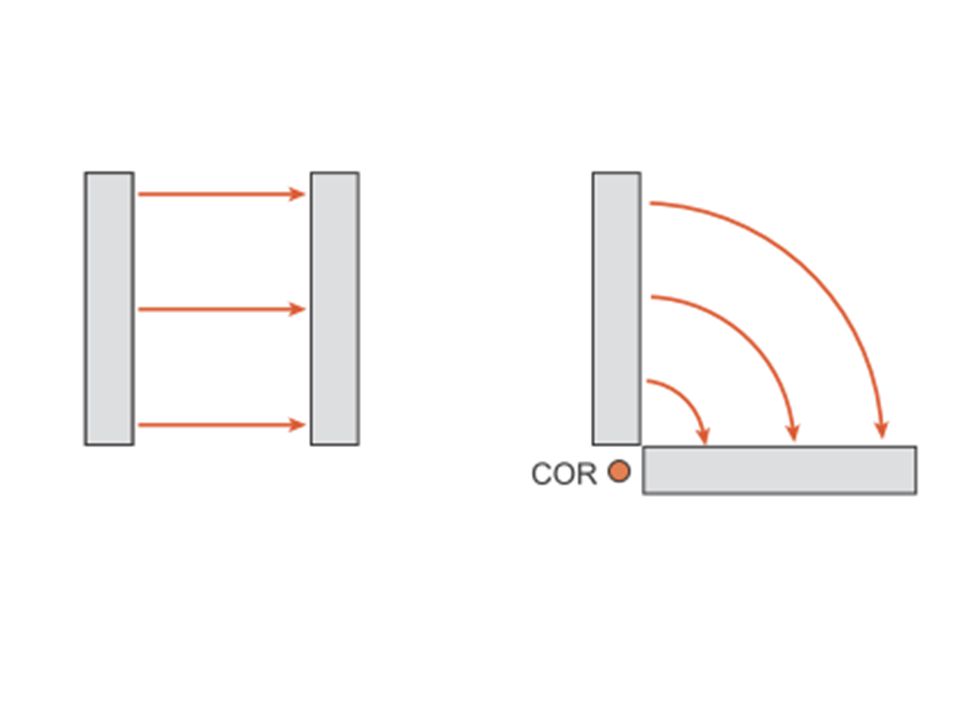
FORMAS DE MOVIMIENTO TRASLACIÓN:
También conocido como movimiento linear, tiene lugar cuando un cuerpo mueve todas sus partes de manera que todas recorren el mismo espacio en la misma dirección en el mismo intervalo de tiempo. Un cuerpo puede tener movimiento de traslación con trayectoria: Rectilínea Curvilínea No linear

3
FORMAS DE MOVIMIENTO ROTACIÓN:
El movimiento rotatorio o angular sucede cuando todas las partes de un cuerpo se mueven a lo largo de una trayectoria circular alrededor de un eje, con el mismo ángulo, al mismo tiempo.

6
TRIGONOMETRÍA Teorema de pitágoras
Esencial para solucionar problemas básicos de la biomecánica y obtener los componentes de fuerza relacionando ángulos y distancias del triángulo recto Teorema de pitágoras

7
RELACIONES BÁSICAS EN EL TRIÁNGULO RECTÁNGULO
Para un ángulo determinado, el seno de éste ángulo es una constante independiente del tamaño del triángulo Es decir, cuando en un ángulo rectángulo, uno de los ángulos agudos es igual a 30⁰, la relación entre el lado adyacente a este ángulo y la hipotenusa es siempre la misma, es decir, 0.45 Y al revés, cuando la relación entre el lado opuesto y la hipotenusa es de 0.45 quiere decir que el ángulo es de 30⁰

8
RELACIONES BÁSICAS EN EL TRIÁNGULO RECTÁNGULO
La gran aplicación de estas funciones en biomecánica es que si se conoce el ángulo y la dimensión de uno de los lados, se pueden calcular las longitudes de los otros lados del triángulo. Son útiles en biomecánica para resolver fuerzas en sus componentes en un triángulo

9
EJEMPLOS Si el ángulo es de 60⁰ y la hipotenusa mide 5 cm, el lado opuesto medira: Y el lado adyacente medirá:

10
ESCALARES Cantidades escalares son aquellas que sólo poseen un número que indican la cantidad y una unidad de medida Cuando se trata con ellas siempre se debe tener en cuenta que debe tener las mismas unidades de medida. La masa, el tiempo y la longitud son ejemplos de magnitudes escalares

11
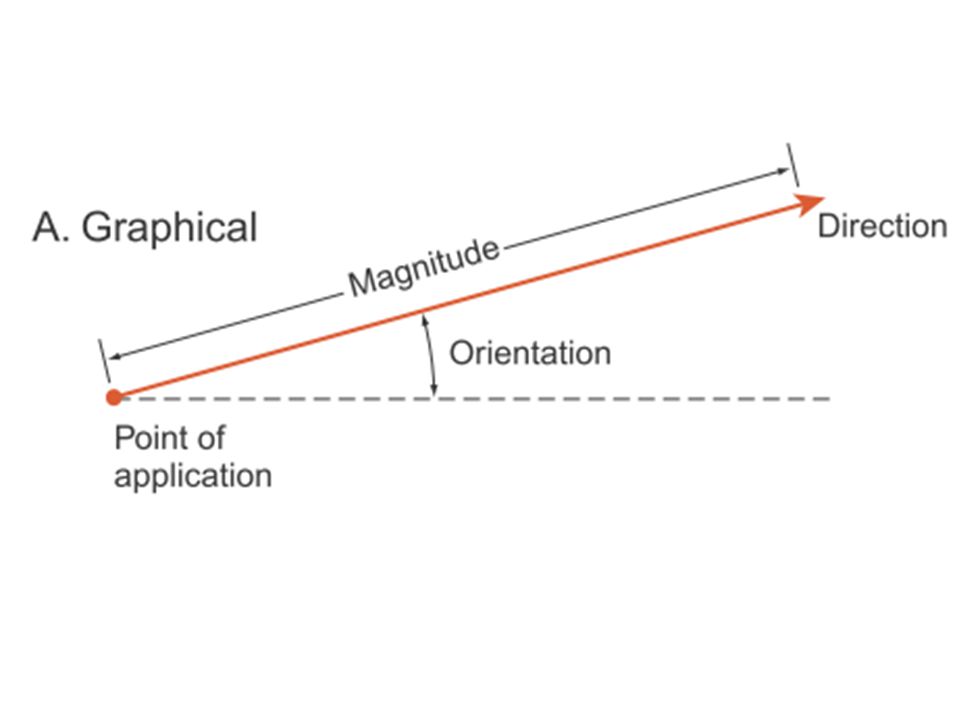
VECTORES Los parámetros biomecánicos pueden ser representados como vectores Un vector es descrito como una cantidad que tiene: Magnitud Orientación Dirección o sentido Punto de aplicación

12
VECTORES El uso más común de los vectores en biomecánica es para representar fuerzas: Musculares Reacción articular Se representan con líneas y una flecha al final: La longitud de la línea representa su magnitud La posición angular de la línea representa su orientación La localización de la cabeza de la flecha representa su dirección La ubicación de la línea en el espacio representa su punto de aplicación

14
VECTORES La representación matemática de los vectores se realiza con coordenadas polares, ej: 5N a 37⁰ de la horizontal

15
VECTORES La representación matemática debe ser transformada en sus componentes en ambos ejes, ej: Ax = 4N Ay = 3N

16
FUERZA Y MOMENTO Fuerza:
“Empuje o halón” que resulta del contacto físico entre dos objetos La única excepción a esta regla es la fuerza de gravedad, en la cual no hay contacto directo entre objetos Los generadores de fuerza más comunmente relacionadas al sistema músculoesquelético son: Músculos Tendones Ligamentos Fricción Reacción al piso Peso

17
FUERZA La fuerza es una cantidad vectorial con magnitud, orientación, dirección y punto de aplicación Las fuerzas actúan a través de las inserciones tendinosas Las fuerzas de reacción articular lo hacen a través de su respectivo centro de rotación El punto de aplicación de la fuerza se encuentra con respecto a un punto fijo, usualmente el centro de rotación: Esta información se usa para calcular el momento ocasionado por la fuerza

18
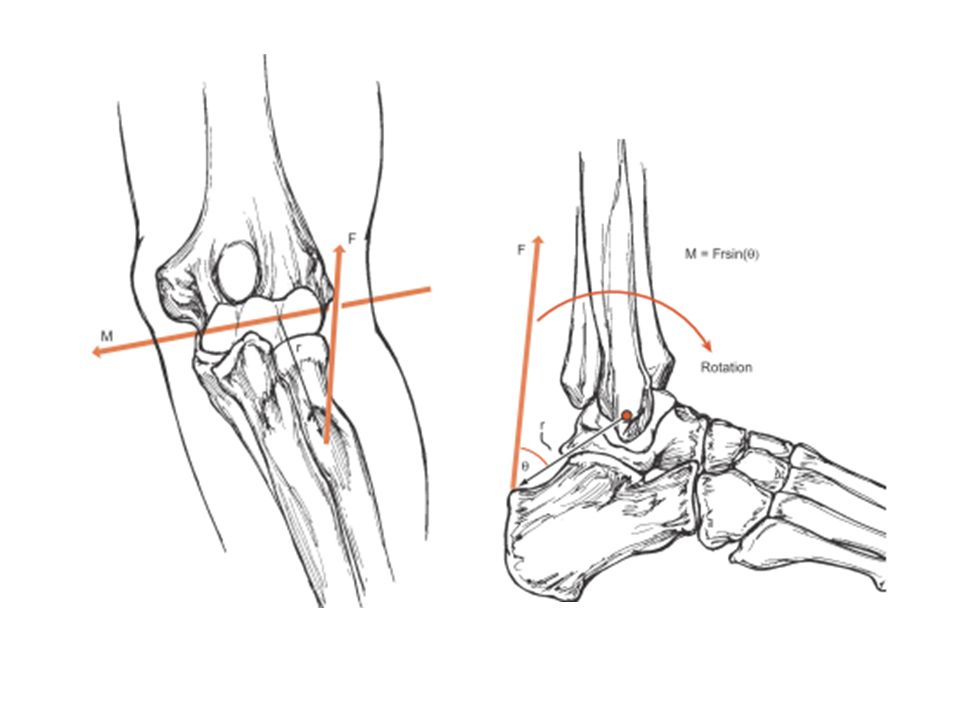
MOMENTO En el sistema musculoesquelético un momento (M) es causado por una fuerza (F) que actúa a una distancia (r) desde el centro de rotación de un segmento. Un momento tiende a causar una rotación y es definido por la función: M = r x F
 es causado por una fuerza (F) que actúa a una distancia (r) desde el centro de rotación de un segmento. Un momento tiende a causar una rotación y es definido por la función: M = r x F.")
19
TORQUE El torque es otro término que es sinónimo a un momento escalar
La magnitud de un momento (torque) se calcula: M = r x F x sen Ѳ Aunque existen distancias diferentes que pueden ser usadas para conectar un eje con una línea de acción de fuerza, se calcula el mismo momento sin importar cuál sea la distancia seleccionada
 se calcula: M = r x F x sen Ѳ. Aunque existen distancias diferentes que pueden ser usadas para conectar un eje con una línea de acción de fuerza, se calcula el mismo momento sin importar cuál sea la distancia seleccionada.")
21
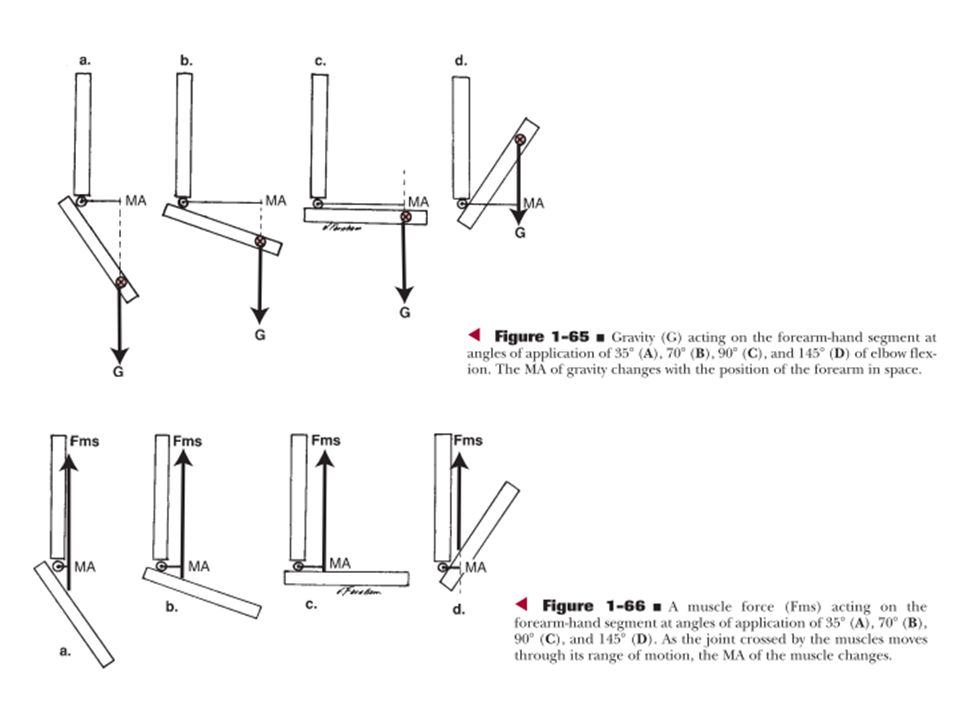
BRAZO DE PALANCA La distancia que es perpendicular al vector de fuerza, es conocida como brazo de palanca de esa fuerza Dado que el seno de 90⁰ es 1, el uso de un brazo de palanca simplifica el cálculo del momento a M = MA x F Así, el brazo de palanca se calcula desde cualquier distancia dado que: MA = r x sen Ѳ

22
DIAGRAMAS DE CUERPO LIBRE
Ayudan a identificar las fuerzas y momentos que actúan sobre los cuerpos. Las partes que constituyen un sistema, se aíslan de sus alrededores y se reemplazan por las fuerzas propias y los momentos

25
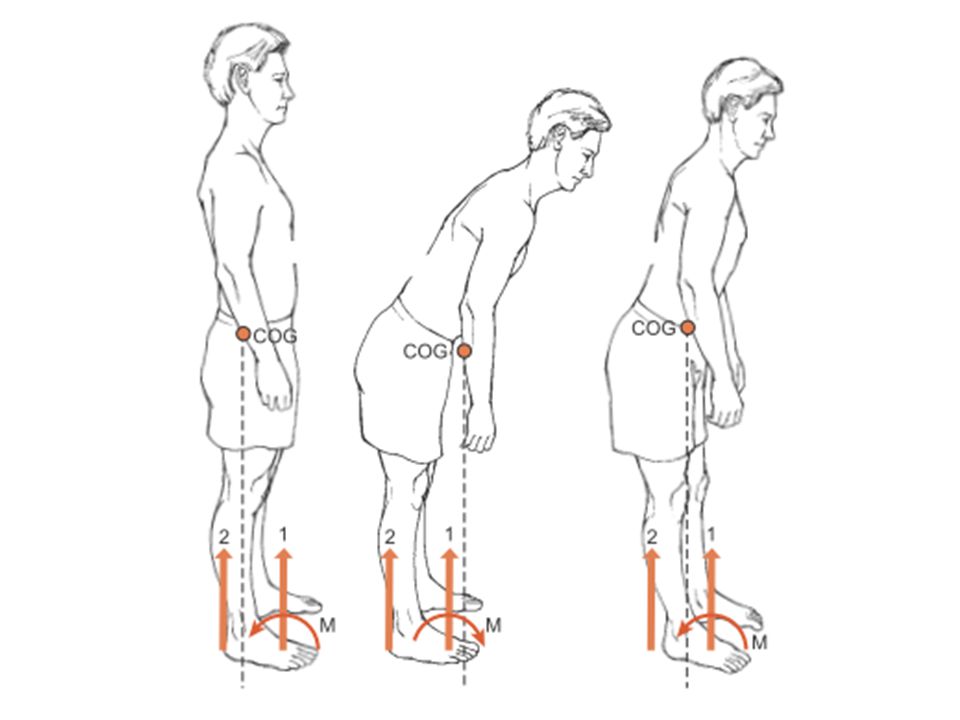
CENTRO DE GRAVEDAD Y ESTABILIDAD
Es el punto en el cual todo el peso de un cuerpo se puede pensar que está concentrado y depende de la forma y la distribución de masa del cuerpo. Ej: el centro de gravedad humano está en S2 y cambia de acuerdo a la posición asumida por el cuerpo o a cambios en la forma del cuerpo

27
INERCIA Lenguaje común: “Resistencia a la acción o al cambio”
Definición mecánica: “RESISTENCIA A LA ACELERACIÓN” “ES LA TENDENCIA DE UN CUERPO A MANTENER SU ESTADO ACTUAL DE MOVIMIENTO, BIEN SEA PORQUE PERMANEZCA INMÓVIL O SE MUEVA A UNA VELOCIDAD CONSTANTE

28
INERCIA La inercia no tiene unidades de medida, pero:
La cantidad de inercia que posee un cuerpo es directamente proporcional a su masa, así: A mayor masa de un cuerpo, mayor es su tendencia a permanecer en su estado actual de movimiento y mayor dificultad habrá para cambiar ése estado

29
PRESIÓN La presión se define como la distribución de una fuerza en un área determinada: La unidad de presión es el Newton / m² o Pascal Ej: Dónde existe más presión para una fuerza de 556 N: para un área de 4 cm² o para un área de 175 cm²

30
VOLUMEN Es la cantidad de espacio que ocupa un cuerpo
Dado que el espacio tiene 3 dimensiones (ancho – alto – profundo), la unidad de volumen es la multiplicación de una unidad de longitud, por otra unidad de longitud, por otra unidad de longitud = m³
, la unidad de volumen es la multiplicación de una unidad de longitud, por otra unidad de longitud, por otra unidad de longitud = m³.")
31
DENSIDAD El concepto de densidad, combina la masa de un cuerpo con su volumen La densidad es definida como la masa por la unidad de volumen Su unidad de medida es el kg/m³

32
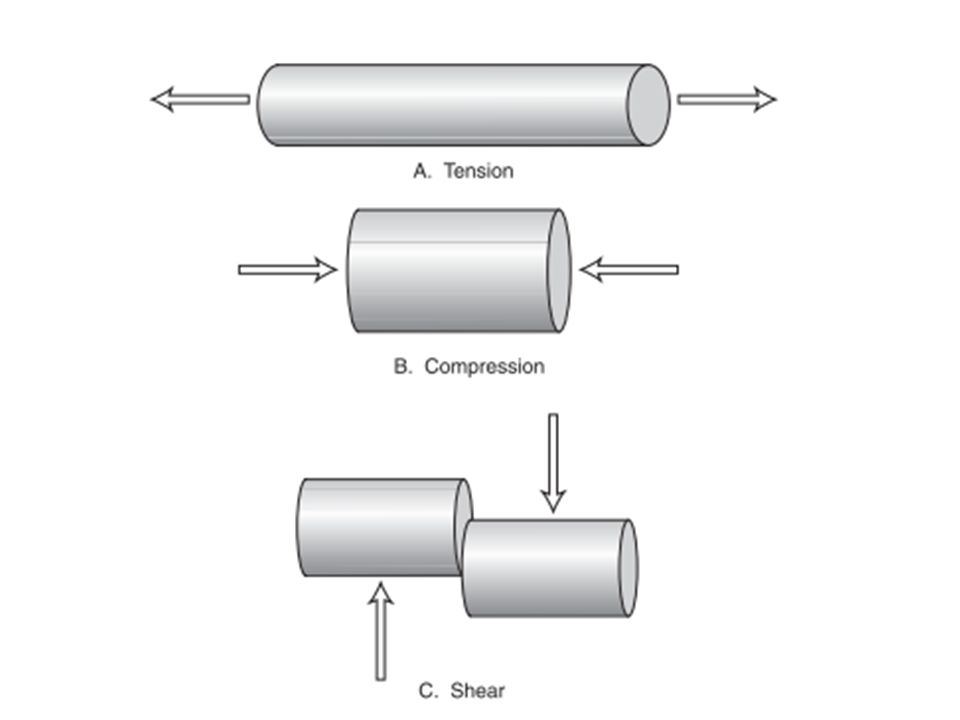
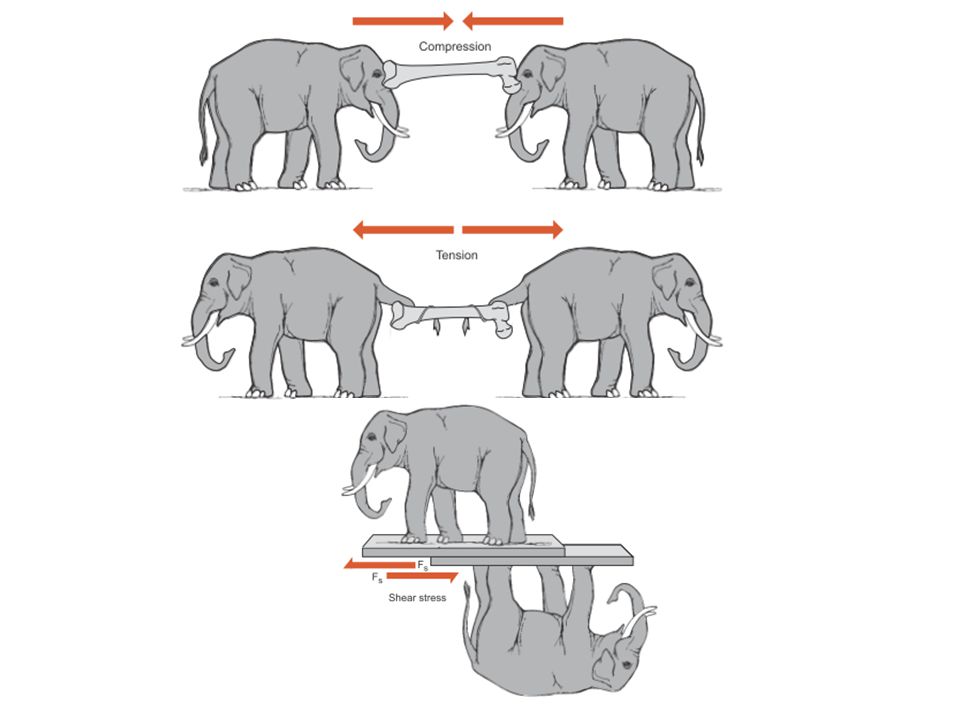
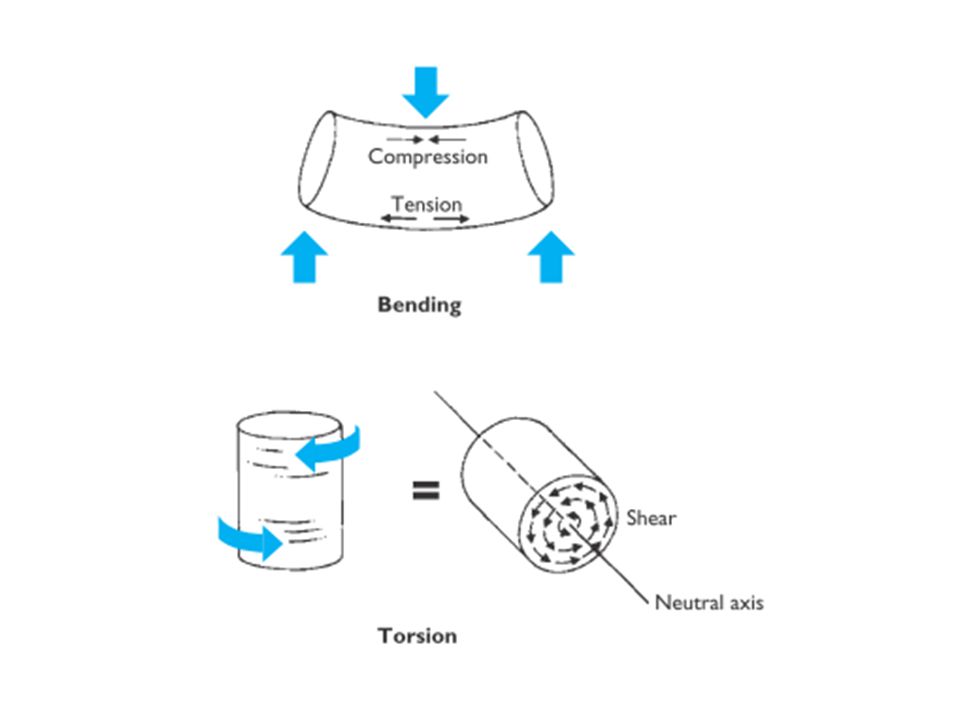
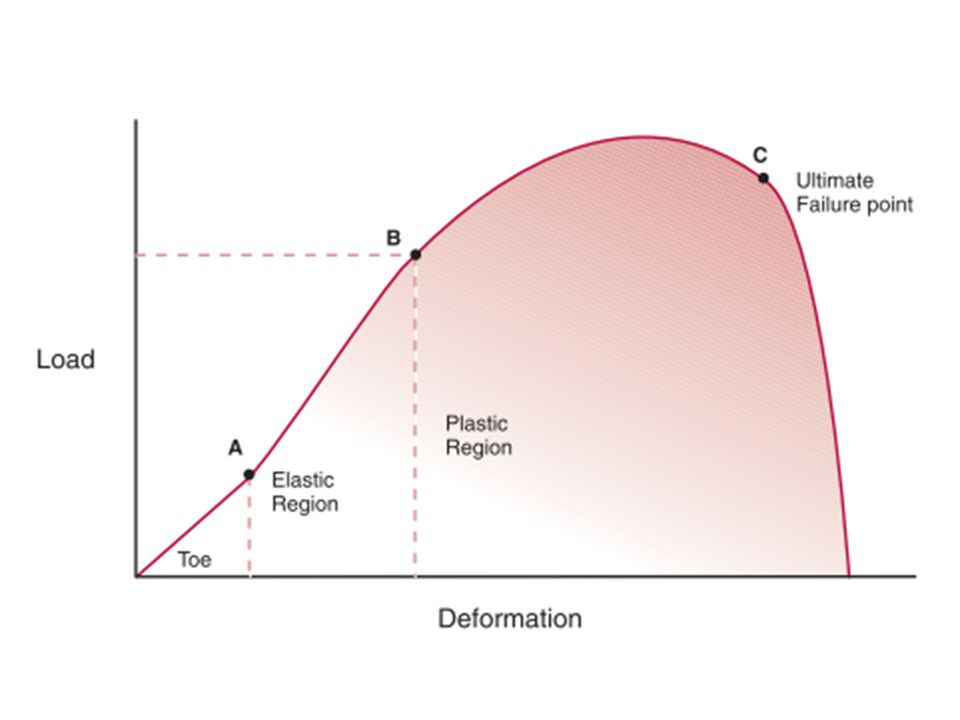
CARGAS MECÁNICAS EN EL TEJIDO CONECTIVO
La tensión muscular, la fuerza gravitacional y las fuerzas externas que afectan al cuerpo lo hacen dependiendo de: Dirección Magnitud Duración

38
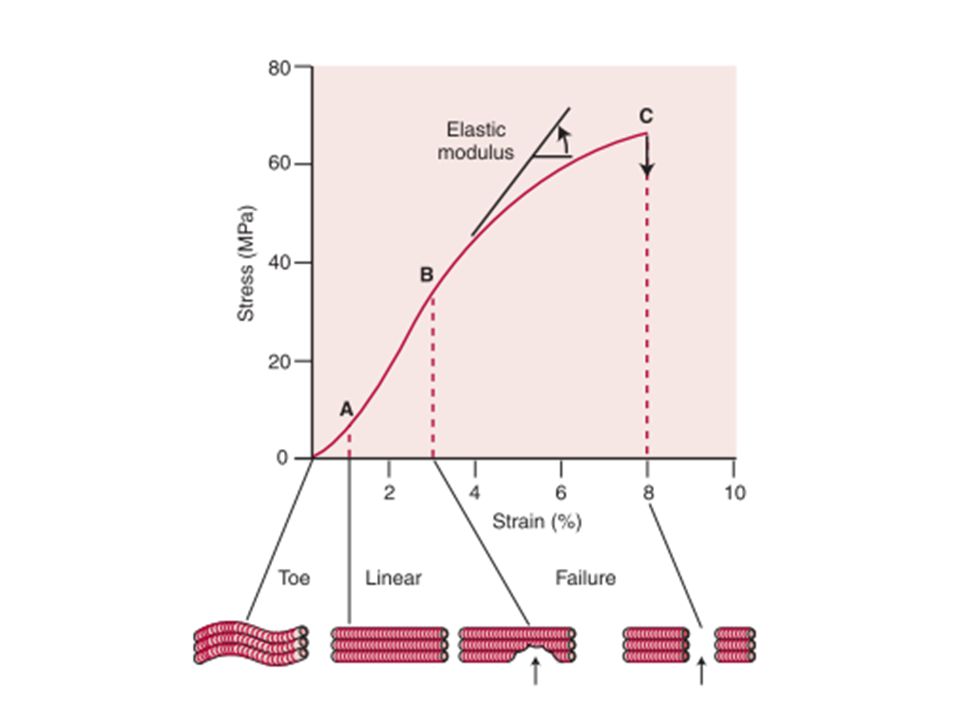
VISCOELASTICIDAD El tejido conectivo es un material viscoelástico, dependiente del tiempo y de la historia del material Elasticidad: Es la capacidad de un material para retornar a su estado original después de ser deformado Viscosidad: Se refiere a la resistencia de un material al flujo. Depende de la cantidad de proteoglicanos y agua en la estructura del tejido conectivo Viscosidad alta: alta resistencia a la deformación

39
VISCOELASTICIDAD Materiales viscoelásticos
Soportan deformación (tensil – compresiva) volviendo a su estado original después de eliminada la carga Pero, las cualidades viscosas hacen que la deformación sea dependiente del tiempo al retornar a su estado original
 volviendo a su estado original después de eliminada la carga. Pero, las cualidades viscosas hacen que la deformación sea dependiente del tiempo al retornar a su estado original.")
40
PROPIEDADES DE MATERIALES VISCOELÁSTICOS
Creep: Si una fuerza es aplicada y mantenida, el material viscoelástico, se deformará y la duración de esta deformación se incrementará con el tiempo

41
PROPIEDADES DE MATERIALES VISCOELÁSTICOS
Stres - Relajación: Si un tejido conectivo es deformado en tensión, la fuerza requerida para mantener la deformación, a medida que pasa el tiempo, disminuirá

42
PROPIEDADES DE MATERIALES VISCOELÁSTICOS
Sensibilidad de la tasa de deformación: Si la carga que deforma la estructura lo hace de manera rápida, el pico de fuerza requerido para lograr la deformación será más alto que si lo hace de manera lenta

43
PROPIEDADES DE MATERIALES VISCOELÁSTICOS
Histéresis: A medida que una fuerza es aplicada y removida, produciendo un ciclo de deformación y recuperación de la forma del tejido, no toda la energía guardada se libera durante la recuperación de la forma, dado que se pierde en forma de calor.

Presentaciones similares








>")












