Descargar la presentación
La descarga está en progreso. Por favor, espere

1
TRANSFORMACIONES GEOMÉTRICAS
GRAFICACIÓN I

2
Transformaciones en dos dimensiones
Los objetos se definen mediante un conjunto de puntos. Las transformaciones son procedimientos para calcular nuevas posiciones de estos puntos, cambiado el tamaño y orientación del objeto. Las operaciones básicas de transformación son Traslación Escalamiento Rotación.

3
Traslación Las coordenadas (x, y) de un objeto se transforman a (x', y') de acuerdo a las fórmulas: El par (Tx, Ty) se conoce como vector de traslación. y x (a)
 se conoce como vector de traslación. y. x. (a)")
4
Ejemplo traslación Vector de desplazamiento T = (–3, –2)
(x1, y1) = (2, 3) (x1, y1) (x2, y2) = (1, 1) Vector de desplazamiento (x1’, y1’) (x3, y3) = (3, 1) (x3, y3) (x2, y2) (x2’, y2’) (x3’, y3’) (x1’, y1’) = (2, 3) + (–3, –2) = (–1, 1) (x2’, y2’) = (1, 1) + (–3, –2) = (–2, –1) (x3’, y3’) = (3, 1) + (–3, –2) = (0, –1)
 = (2, 3) (x1, y1) (x2, y2) = (1, 1) Vector de desplazamiento. (x1’, y1’) (x3, y3) = (3, 1) (x3, y3) (x2, y2) (x2’, y2’) (x3’, y3’) (x1’, y1’) = (2, 3) + (–3, –2) = (–1, 1) (x2’, y2’) = (1, 1) + (–3, –2) = (–2, –1) (x3’, y3’) = (3, 1) + (–3, –2) = (0, –1)")
5
Escalamiento El escalamiento modifica el tamaño de un polígono. Para obtener este efecto, se multiplica cada par coordenado (x, y) por un factor de escala en la dirección x y en la dirección y para obtener el par (x', y'). Las fórmulas son
 por un factor de escala en la dirección x y en la dirección y para obtener el par (x , y ). Las fórmulas son.")
6
Ejemplo escalamiento Factores de escalamiento S = (2, –1)
(x1, y1) = (2, 3) (x1, y1) (x2, y2) = (1, 1) (x3, y3) = (3, 1) (x3, y3) (x2, y2) (x3’, y3’) (x2’, y2’) (x1’, y1’) = (2*2, (–1)3) = (4, –3) (x2’, y2’) = (2*1, (–1)1) = (2, –1) (x3’, y3’) = (2*3, (–1)1) = (6, –1) (x1’, y1’)
 = (2, 3) (x1, y1) (x2, y2) = (1, 1) (x3, y3) = (3, 1) (x3, y3) (x2, y2) (x3’, y3’) (x2’, y2’) (x1’, y1’) = (2*2, (–1)3) = (4, –3) (x2’, y2’) = (2*1, (–1)1) = (2, –1) (x3’, y3’) = (2*3, (–1)1) = (6, –1) (x1’, y1’)")
7
Rotación La rotación gira los puntos de una figura alrededor de un punto fijo. De la figura se obtiene Simplificando

8
Ejemplo rotación Ángulo de rotación q = 45° (x1, y1) = (2, 3)
(x1’, y1’) = (2cos(45°) – 3sen(45°), 3cos(45°) + 2sen(45°)) = (2*0.707–3*0.707, 3* *0.707) = (–0.707, 3,54) (x2’, y2’) = (3cos(45°) –sen(45°), cos(45°) + 3sen(45°)) = (3*0.707–0.707, *0.707) = (1.414, 2.828) (x3’, y3’) = (cos(45°) – sen(45°), cos(45°) + sen(45°)) = (0.707–0.707, ) = (0, 1.414)
 = (2cos(45°) – 3sen(45°), 3cos(45°) + 2sen(45°)) = (2*0.707–3*0.707, 3* *0.707) = (–0.707, 3,54) (x2’, y2’) = (3cos(45°) –sen(45°), cos(45°) + 3sen(45°)) = (3*0.707–0.707, *0.707) = (1.414, 2.828) (x3’, y3’) = (cos(45°) – sen(45°), cos(45°) + sen(45°)) = (0.707–0.707, ) = (0, 1.414)")
9
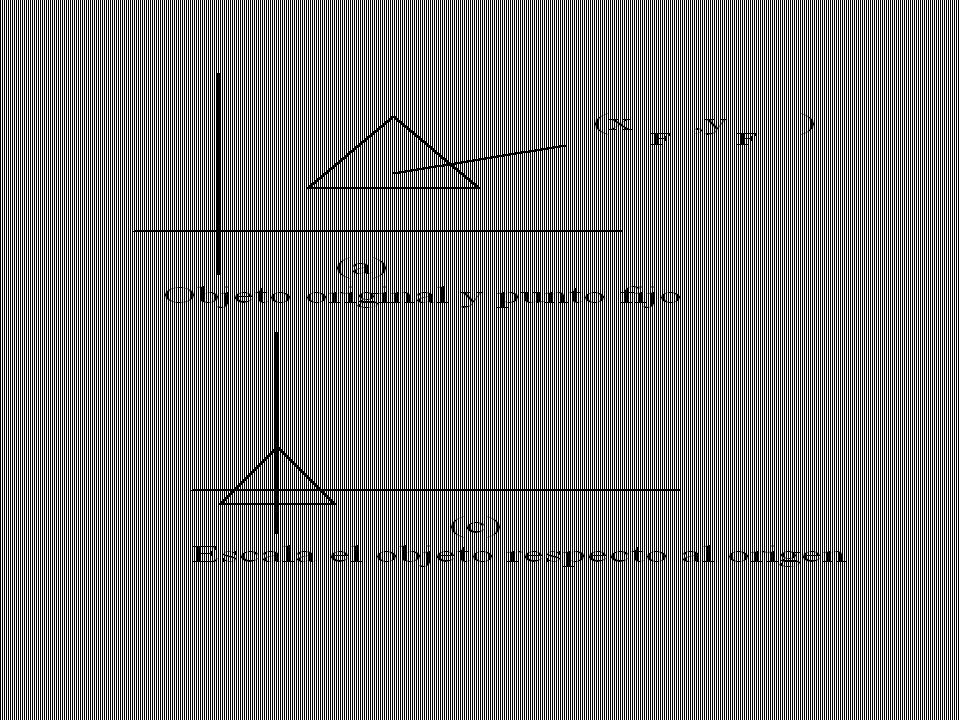
Escalamiento respecto a un punto fijo
Se puede llevar a cabo un escalamiento respecto a un punto fijo trasladando primero ese punto al origen, después escalando y luego regresando el objeto a la posición original. Las ecuaciones son Reacomodando

10
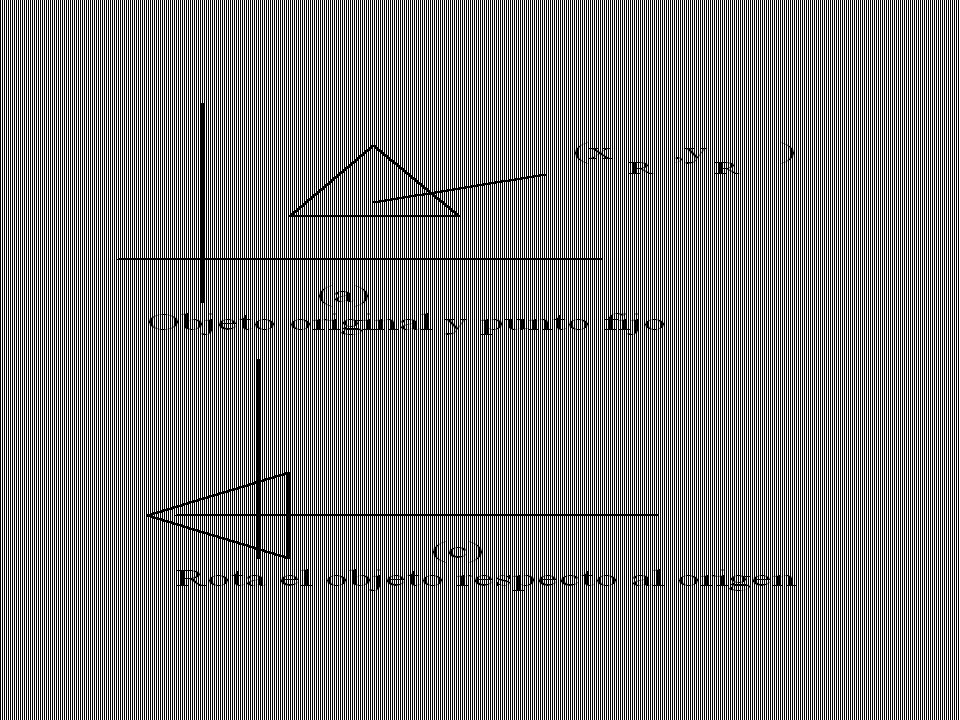
Rotación respecto a un punto arbitrario
La rotación respecto a un punto arbitrario es

11
Ejemplo rotación 2 Ángulo de rotación q = –90°
Centro de rotación (3,1) (x1, y1) = (2, 3) (x2’, y2’) (x1, y1) (x2, y2) = (1, 1) (x1’, y1’) (x3, y3) = (3, 1) (x3, y3) = (x3’, y3’) (x2, y2) x1’ = 3 + (2 – 3)cos(–90°) – (3 – 1) sen(–90°)= = 5 y1’ = 1 + (3 – 1)cos(–90°) + (2 – 3) sen(–90°)= = 2 x2’ = 3 + (1 – 3)cos(–90°) – (1 – 1) sen(–90°)= 3 y2’ = 1 + (1 – 1)cos(–90°) + (1 – 3) sen(–90°)= = 3 x3’ = 3 + (3 – 3)cos(–90°) – (1 – 1) sen(–90°)= 3 y3’ = 1 + (1 – 1)cos(–90°) + (3 – 3) sen(–90°)= 1
 (x1, y1) = (2, 3) (x2’, y2’) (x1, y1) (x2, y2) = (1, 1) (x1’, y1’) (x3, y3) = (3, 1) (x3, y3) = (x3’, y3’) (x2, y2) x1’ = 3 + (2 – 3)cos(–90°) – (3 – 1) sen(–90°)= = 5. y1’ = 1 + (3 – 1)cos(–90°) + (2 – 3) sen(–90°)= = 2. x2’ = 3 + (1 – 3)cos(–90°) – (1 – 1) sen(–90°)= 3. y2’ = 1 + (1 – 1)cos(–90°) + (1 – 3) sen(–90°)= = 3. x3’ = 3 + (3 – 3)cos(–90°) – (1 – 1) sen(–90°)= 3. y3’ = 1 + (1 – 1)cos(–90°) + (3 – 3) sen(–90°)= 1.")
12
Código en C struct point{ float x,y; };
void translate(point &p, float tx, float ty){ p.x = p.x + tx; p.y = p.y + ty; } void scale(point &p, float sx, float sy){ p.x = sx*p.x; p.y = sy*p.y; void rotate(point &p, float a){ float sn = sin(a*PI/180); float cs = cos(a*PI/180); p.x = cs*p.x - sn*p.y; p.y = cs*p.y + sn*p.x;
{ p.x = p.x + tx; p.y = p.y + ty; } void scale(point &p, float sx, float sy){ p.x = sx*p.x; p.y = sy*p.y; void rotate(point &p, float a){ float sn = sin(a*PI/180); float cs = cos(a*PI/180); p.x = cs*p.x - sn*p.y; p.y = cs*p.y + sn*p.x;")
13
void rotateFix(point &p, float a,float xr, float yr){
translate(p,-xr,-yr); rotate(p,a); translate(p,xr,yr); } void scaleFix(point &p, float sx, float sy,float xf, float yf){ translate(p,-xf,-yf); scale(p,sx,sy); translate(p,xf,yf); void translatePoly(point *p,int n, float tx, float ty){ for(int i=0; i<n ; i++) translate(p[i],tx,ty);
; rotate(p,a); translate(p,xr,yr); } void scaleFix(point &p, float sx, float sy,float xf, float yf){ translate(p,-xf,-yf); scale(p,sx,sy); translate(p,xf,yf); void translatePoly(point *p,int n, float tx, float ty){ for(int i=0; i<n ; i++) translate(p[i],tx,ty);")
14
Tarea Escriba una función que dibuje un polígono relleno. Haciendo uso de esa función, escriba un programa en C que dibuje la figura que se muestra transformada mediante traslaciones, escalamientos y rotaciones para crear la imagen que se muestra.

15
Coordenadas homogéneas
Para poder representar las tres transformaciones en forma matricial como producto de matrices, es necesario representar los puntos en coordenadas homogéneas. Estas coordenadas agregan una tercer componente a las coordenadas bidimensionales. De tal forma que, un punto (x, y) pasa a ser (x, y, W). El punto en coordenadas Cartesianas representado por esta tríada es el (x/W, y/W). El valor de W es generalmente 1.
 pasa a ser (x, y, W). El punto en coordenadas Cartesianas representado por esta tríada es el (x/W, y/W). El valor de W es generalmente 1.")
16
Representación matricial de traslaciones
Haciendo uso de coordenadas homogéneas la traslación puede representarse como: En forma abreviada la transformación se representará por T(Tx, Ty)
")
17
Representación matricial de escalamientos
Haciendo uso de coordenadas homogéneas el escalamiento puede representarse como: En forma abreviada la transformación se representará por S(Sx, Sy)
")
18
Representación matricial de rotaciones
Haciendo uso de coordenadas homogéneas la rotación puede representarse como: En forma abreviada la transformación se representará por R(q)
")
19
Composición de transformaciones
Para aplicar varias transformaciones a un conjunto de puntos basta con combinar las matrices de transformación en una sola, mediante multiplicación matricial. En caso de tener solo transformaciones del mismo tipo, la combinación sigue reglas muy simples. Traslación: Escalamiento: Rotación:

20
Escalamiento respecto a un punto fijo en forma matricial
Para llevar a cabo un escalamiento respecto a un punto fijo, se procede multiplicando una matriz de traslación para llevar el punto fijo al origen por una de escalamiento y posteriormente por otra de traslación para llevar al punto fijo a su posición original.

22
Rotación respecto a un punto fijo en forma matricial
Para llavar a cabo una rotación respecto a un punto fijo, se procede multiplicando una matriz de traslación para llevar el punto fijo al origen por una de rotación y posteriormente por otra de traslación para llevar al punto fijo a su posición original.

24
Forma general En general una transformación que utilice traslaciones, escalamientos y rotaciones tendrá la forma: Por tanto, el cálculo de las coordenadas transformadas se podrá hacer con las siguientes ecuaciones

25
Otras transformaciones
Otras transformaciones que permiten llevar a cabo operaciones muy útiles, estas son: Reflexiones Corte.

26
Reflexiones en x y y Las reflexiones respecto al eje x y y se obtienen con las matrices siguientes:

27
Reflexión respecto al origen
La reflexión respecto al origen se obtiene con :

28
Reflexión respecto a la recta y = x
Una reflexión respecto a la recta y = x, puede obtenerse en tres pasos: girar un ángulo de 45 en el sentido de las manecillas del reloj, una reflexión respecto al eje x, y una rotación de 45 grados en contra del sentido del reloj. Posición original Posición original Posición reflejada (a) Rotación de -45 grados (b) Reflexión respecto a x. (a) Rotación de 45 grados
 Rotación de -45. grados. (b) Reflexión. respecto. a x. (a) Rotación de 45. grados.")
29
Corte en x El corte produce una deformación similar al deslizamiento de una capa sobre otra. El corte en x se produce por la matriz:

30
Corte en y El corte en y se produce por la matriz

31
Implementación de transformaciones con matrices
Para la implementación de matrices es conveniente definir tipos para punto y matriz. Luego funciones para crear las matrices de las transformaciones básicas. Lo primero es crear una matriz unitaria y a partir de está crear las demás funciones. Es necesaria definir una función para multiplicar matrices y poder acumular las transformaciones. Otra función debe aplicar una matriz de transformación a un punto y regresar el punto transformado. Finalmente aplicar la matriz a un ppolígono.

32
Tipos básicos Los tipos básicos para punto, matriz y polígono son los siguientes: typedef double Point[3]; typedef double Matrix[3][3]; typedef Point poligono[10]; El punto p(1, -4) se define como Point p = {1,-4,1};
![Tipos básicos Los tipos básicos para punto, matriz y polígono son los siguientes: typedef double Point[3];](http://slideplayer.es/slide/3145286/11/images/32/Tipos+b%C3%A1sicos+Los+tipos+b%C3%A1sicos+para+punto%2C+matriz+y+pol%C3%ADgono+son+los+siguientes%3A+typedef+double+Point%5B3%5D%3B.jpg "typedef double Matrix[3][3]; typedef Point poligono[10]; El punto p(1, -4) se define como. Point p = {1,-4,1};")
33
Crear matriz identidad
La matriz identidad es la base para las demás funciones void set_identity(Matrix m){ int i,j; for(i = 0; i<3 ; i++) for(j = 0; j<3 ; j++) m[i][j] = (i==j); }
{ int i,j; for(i = 0; i<3 ; i++) for(j = 0; j<3 ; j++) m[i][j] = (i==j); }")
34
Matrices de traslación y escalamiento
Matriz de traslación. void create_traslation_matrix(double tx, double ty,Matrix t){ set_identity(t); t[2][0] = tx; t[2][1] = ty; } Matriz de escalamiento: void create_scale_matrix(double sx, double sy,Matrix t){ t[0][0] = sx; t[1][1] = sy;
{ set_identity(t); t[2][0] = tx; t[2][1] = ty; } Matriz de escalamiento: void create_scale_matrix(double sx, double sy,Matrix t){ t[0][0] = sx; t[1][1] = sy;")
35
Matriz de rotación El ángulo se especifica en grados.
void create_rotation_matrix(double a,Matrix t){ set_identity(t); double sn = sin(a*PI/180); double cs = cos(a*PI/180); t[0][0] = cs; t[0][1] = sn; t[1][0] = -sn;t[1][1] = cs; }
{ set_identity(t); double sn = sin(a*PI/180); double cs = cos(a*PI/180); t[0][0] = cs; t[0][1] = sn; t[1][0] = -sn;t[1][1] = cs; }")
36
Matriz de corte Solo es necesario definir una matriz de corte. Si se hace solo corte en x, shy = 0 y si se hace solo corte en y, shx = 0. void create_shear_matrix(double shx, double shy,Matrix t){ set_identity(t); t[0][1] = shy; t[1][0] = shx; }
{ set_identity(t); t[0][1] = shy; t[1][0] = shx; }")
37
Acumula dos transformaciones
Los parámetros m1 y m2 son de entrada, el resultado se almacena en m. void accumulate_matrices(Matrix m1,Matrix m2,Matrix m){ int i,j,k; double s; for(i = 0; i<3 ; i++) for(j = 0; j<3 ; j++){ s = 0; for(k = 0; k<3 ; k++) s = s+m1[i][k]*m2[k][j]; m[i][j] = s; }
{ int i,j,k; double s; for(i = 0; i<3 ; i++) for(j = 0; j<3 ; j++){ s = 0; for(k = 0; k<3 ; k++) s = s+m1[i][k]*m2[k][j]; m[i][j] = s; }")
38
Transformar un punto y un polígono
El punto de entrada es p1 y el de salida p2. void transformPoint(Point p1,Matrix m,Point p2){ p2[0] = m[0][0]*p1[0]+m[1][0]*p1[1]+m[2][0]*p1[2]; p2[1] = m[0][1]*p1[0]+m[1][1]*p1[1]+m[2][1]*p1[2]; p2[2] = m[0][2]*p1[0]+m[1][2]*p1[1]+m[2][2]*p1[2]; } El polígono de entrada es p1 y el de salida p2. n es el número de puntos del polígono. void transformPoly(poligono p1,int n,Matrix m,poligono p2){ for(int i = 0;i<n;i++) transformPoint(p1[i],m,p2[i]);
{ p2[0] = m[0][0]*p1[0]+m[1][0]*p1[1]+m[2][0]*p1[2]; p2[1] = m[0][1]*p1[0]+m[1][1]*p1[1]+m[2][1]*p1[2]; p2[2] = m[0][2]*p1[0]+m[1][2]*p1[1]+m[2][2]*p1[2]; } El polígono de entrada es p1 y el de salida p2. n es el número de puntos del polígono. void transformPoly(poligono p1,int n,Matrix m,poligono p2){ for(int i = 0;i<n;i++) transformPoint(p1[i],m,p2[i]);")
39
Dibujar polígono Dibuja un polígono. Note que la tercer coordenada no se usa. void draw(poligono p,int n){ moveto((int)p[0][0],(int)p[0][1]); for(int i=1;i<n;i++){ lineto((int)p[i][0],(int)p[i][1]); }
p[0][0],(int)p[0][1]); for(int i=1;i<n;i++){ lineto((int)p[i][0],(int)p[i][1]); }")
40
Transformaciones Ventana-Puerto de visión
Las transformaciones ventana-puerto de visión, mapean puntos en el mundo real a puntos en la pantalla. Puerto de visión 2 Puerto de visión 1 Ventana Coordenadas de pantalla Coordenadas mundiales

41
Transformaciones de visión
(xmax, ymax) (xmin, ymin) Ventana en coordenadas mundiales Ventana trasladada al origen (umax, vmax) (umin, vmin) Ventana escalada al tamaño del área de visión. Traslación hasta la posición final.
 (xmin, ymin) Ventana en coordenadas mundiales. Ventana trasladada al origen. (umax, vmax) (umin, vmin) Ventana escalada al tamaño del área de visión. Traslación hasta la posición final.")
42
Transformaciones de visión (continuación)
")
43
Transformaciones de visión (continuación)
")
44
Implementación en C void crate_window_view_matrix(
double xmin,double ymin, double xmax, double ymax, int umin, int vmin, int umax, int vmax, Matrix m){ Matrix m1,m2,m3,m4; create_traslation_matrix(-xmin,-ymin,m1); create_scale_matrix((umax-umin)/(xmax-xmin), (vmax-vmin)/(ymax-ymin),m2); create_traslation_matrix(umin,vmin,m3); accumulate_matrices(m1,m2,m4); accumulate_matrices(m4,m3,m); }
{ Matrix m1,m2,m3,m4; create_traslation_matrix(-xmin,-ymin,m1); create_scale_matrix((umax-umin)/(xmax-xmin), (vmax-vmin)/(ymax-ymin),m2); create_traslation_matrix(umin,vmin,m3); accumulate_matrices(m1,m2,m4); accumulate_matrices(m4,m3,m); }")
45
Rutina de despliegue void show_polygon(
double xmin,double ymin,double xmax,double ymax, int umin,int vmin,int umax,int vmax,poligono p){ Matrix m1,m2; poligono p2,p3; //poligonos transformados int xv1,xv2,yv1,yv2; //coordenadas del viewport //es necesario ordenar las coordenadaas del viewport if(umin>umax){ xv1 = umax; xv2 = umin; }else{ xv1 = umin; xv2 = umax; } if(vmin>vmax){ yv1 = vmax; yv2 = vmin; yv1 = vmin; yv2 = vmax;
{ Matrix m1,m2; poligono p2,p3; //poligonos transformados. int xv1,xv2,yv1,yv2; //coordenadas del viewport. //es necesario ordenar las coordenadaas del viewport. if(umin>umax){ xv1 = umax; xv2 = umin; }else{ xv1 = umin; xv2 = umax; } if(vmin>vmax){ yv1 = vmax; yv2 = vmin; yv1 = vmin; yv2 = vmax;")
46
//dibuja un rectángulo para delimitar el viewport
setlinestyle(DOTTED_LINE,0,NORM_WIDTH); rectangle(xv1,yv1,xv2,yv2); //es necesario trasladar al origen porque el viewport // define coordenadas con 0,0 en la esquina superior // izquierda create_traslation_matrix(-xv1,-yv1,m2); crate_window_view_matrix(xmin,ymin,xmax,ymax, umin,vmin,umax,vmax,m1); //transforma a coordenadas de visión transformPoly(p,10,m1,p2); //traslada poígono al origen del viewport transformPoly(p2,10,m2,p3); //establece viewport setviewport(xv1,yv1,xv2,yv2,true); setlinestyle(SOLID_LINE,0,NORM_WIDTH); draw(p3,10); setviewport(0,0,getmaxx(),getmaxy(),false); }
; rectangle(xv1,yv1,xv2,yv2); //es necesario trasladar al origen porque el viewport. // define coordenadas con 0,0 en la esquina superior. // izquierda. create_traslation_matrix(-xv1,-yv1,m2); crate_window_view_matrix(xmin,ymin,xmax,ymax, umin,vmin,umax,vmax,m1); //transforma a coordenadas de visión transformPoly(p,10,m1,p2); //traslada poígono al origen del viewport transformPoly(p2,10,m2,p3); //establece viewport setviewport(xv1,yv1,xv2,yv2,true); setlinestyle(SOLID_LINE,0,NORM_WIDTH); draw(p3,10); setviewport(0,0,getmaxx(),getmaxy(),false); }")
47
Ejemplo de función main
poligono p,p2; Matrix m1,m2; initPol(p); initwindow(500,500); show_polygon(5,5,20,20,220,350,450,20,p); show_polygon(-1,-1,11,11,20,100,100,20,p); show_polygon(-10,-10,20,20,20,200,200,120,p); show_polygon(-1,-1,5,5,20,370,140,250,p); getch(); }
; initwindow(500,500); show_polygon(5,5,20,20,220,350,450,20,p); show_polygon(-1,-1,11,11,20,100,100,20,p); show_polygon(-10,-10,20,20,20,200,200,120,p); show_polygon(-1,-1,5,5,20,370,140,250,p); getch(); }")
48
Salida del ejemplo

49
Propiedades de las transformaciones
Los vectores fila de la submatriz superior 2x2 de rotación tienen tres propiedades: Cada uno es un vector unidad Cada uno es perpendicular al otro (su producto punto es cero) El primer y segundo vector se rotarán por R(q) para que caigan sobre los ejes x y y positivos. Una matriz que cumple esto se le llama ortogonal especial.
 El primer y segundo vector se rotarán por R(q) para que caigan sobre los ejes x y y positivos. Una matriz que cumple esto se le llama ortogonal especial.")
50
Una matriz de transformación de la forma:
Donde la submatriz superior de 2x2 es ortogonal, conserva los ángulos y las longitudes. Estas transformaciones se denominan de cuerpo rígido. Una secuencia arbitraria de traslaciones, rotaciones y escalamientos conserva el paralelismo de las líneas, pero no la longitud ni los ángulos. Estas transformaciones se denominan transformaciones afines.

51
Operaciones de rastreo
El buffer de pantalla se puede manipular directamente para llevar a cabo algunas transformaciones. La más sencilla es la copia de un bloque de un lugar de la pantalla a otro. Para girar una figura un ángulo múltiplo de 90 grados se pueden lograr invirtiendo renglones por columnas. La rotación por 180 grados se logra invirtiendo cada renglón y posteriormente invirtiendo los renglones. Para otros ángulos cada área de pixel de destino se diagrama sobre la matriz que se gira y se calcula la cantidad de superposición con las áreas de pixel que se giran. Entonces se calcula una intensidad para el pixel al promediar las intensidades de los pixeles fuente superpuestos.

52
Rotación diferente de 90 grados

53
Escalamiento del mapa de bits
Escalamos las áreas de pixeles en el bloque original al emplear los valores de sx y sy y diagramar el rectángulo que se escala sobre un conjunto de pixeles destino. La intensidad de cada pixel destino se designa de acuerdo con el área de superposición con las áreas de pixel que se escalan.

54
Tarea Escribir una biblioteca para realizar transformaciones de 2D utilizando matrices, defina lo siguiente: - Tipo vector y tipo matriz en coordenadas homogéneas - Rutinas para: trasladar, rotar, escalar, reflejar, cortar y transformación de puerto de visión.

55
Animación Para lograr una animación mediante transformaciones es conveniente mantener una copia del los objetos sin transformar. Para lograr la animación se copia el objeto original, luego se le aplican a esta copia las transformaciones a realizar y se dibuja el objeto transformado. Copiar objeto transformar dibujar

56
Ejemplo Define un cruz: void init(){ poly[0].x = 0;poly[0].y = 10;
}
![Ejemplo Define un cruz: void init(){ poly[0].x = 0;poly[0].y = 10;](http://slideplayer.es/slide/3145286/11/images/56/Ejemplo+Define+un+cruz%3A+void+init%28%29%7B+poly%5B0%5D.x+%3D+0%3Bpoly%5B0%5D.y+%3D+10%3B.jpg "}")
57
inicia Lee teclado void play(){ char c; while(true){ int i,p=0;
unsigned int size; point p1[20]; float a=0,da = 0,vx=0,vy=0,x=0,y=0; setactivepage(1); for(i = 0; i< 1000; i++){ putpixel(rand()%400,rand()%400,rand()%15+1); } size = imagesize(0, 0, 400, 400); /* allocate memory to hold the image */ img = malloc(size); /* grab the image */ getimage(0,0,400,400,img); while(true){ if(kbhit()){ c = (char)getch(); switch(c){ case 27:return; case 'i':vy--;break; case 'm':vy++;break; case 'j':vx--;break; case 'k':vx++;break; case 'r':da--;break; case 't':da++;break; case ‘e':s--;break; case ‘w':s++;break; } x += vx; y += vy; a += da; a=(a>360)?a-360:a; a=(a<-360)?a+360:a; if(x>400) x= 0; if(y>400) y= 0; if(x<0) x= 400; if(y<0) y= 400; inicia Lee teclado
; for(i = 0; i< 1000; i++){ putpixel(rand()%400,rand()%400,rand()%15+1); } size = imagesize(0, 0, 400, 400); /* allocate memory to hold the image */ img = malloc(size); /* grab the image */ getimage(0,0,400,400,img); while(true){ if(kbhit()){ c = (char)getch(); switch(c){ case 27:return; case i :vy--;break; case m :vy++;break; case j :vx--;break; case k :vx++;break; case r :da--;break; case t :da++;break; case ‘e :s--;break; case ‘w :s++;break; } x += vx; y += vy; a += da; a=(a>360) a-360:a; a=(a<-360) a+360:a; if(x>400) x= 0; if(y>400) y= 0; if(x<0) x= 400; if(y<0) y= 400; inicia. Lee teclado.")
58
//copia el polígono orignal
for(i = 0; i<12 ; i++) p1[i] = poly[i]; setfillstyle(1,BLUE); setcolor(BLUE); rotatePoly(p1,12,a,15,15); scalePoly(p1,12,3+s,3+s); translatePoly(p1,12,x,y); setvisualpage(1-p); setactivepage(p); putimage(0,0,img,COPY_PUT); fillPoly(p1,12); delay(10); swapbuffers( ); p = 1-p; } Objeto original Gira a grados Se escala 3+s veces Traslada a x,y Doble búfer para animar
 p1[i] = poly[i]; setfillstyle(1,BLUE); setcolor(BLUE); rotatePoly(p1,12,a,15,15); scalePoly(p1,12,3+s,3+s); translatePoly(p1,12,x,y); setvisualpage(1-p); setactivepage(p); putimage(0,0,img,COPY_PUT); fillPoly(p1,12); delay(10); swapbuffers( ); p = 1-p; } Objeto original. Gira a grados. Se escala 3+s veces. Traslada a x,y. Doble búfer para animar.")
59
Biblioteca de transformaciones
//archivo: transform.h struct point{ float x,y; }; void translate(point &p, float tx, float ty); void scale(point &p, float sx, float sy); void rotate(point &p, float a); void rotateFix(point &p, float a,float xr, float yr); void scaleFix(point &p, float sx, float sy,float xf, float yf); void translatePoly(point *p,int n, float tx, float ty); void dibujaPunto(point p); void dibujaPoly(point *p,int n); void transW2V(point *p,int n,float xmin,float ymin,float xmax,float ymax, int umin,int vmin,int umax, int vmax); void copia(point *p1,point *p2,int n);
; void scale(point &p, float sx, float sy); void rotate(point &p, float a); void rotateFix(point &p, float a,float xr, float yr); void scaleFix(point &p, float sx, float sy,float xf, float yf); void translatePoly(point *p,int n, float tx, float ty); void dibujaPunto(point p); void dibujaPoly(point *p,int n); void transW2V(point *p,int n,float xmin,float ymin,float xmax,float ymax, int umin,int vmin,int umax, int vmax); void copia(point *p1,point *p2,int n);")
60
//archivo: transform.cpp
#include <graphics.h> #include <math.h> #include "transform.h" float PI = ; void translate(point &p, float tx, float ty){ ... void transW2V(point *p,int n,float xmin,float ymin,float xmax,float ymax,int umin,int vmin,int umax, int vmax){ int i; for(i=0; i<n ; i++){ translate(p[i],-xmin,-ymin); scale(p[i],(umax-umin)/(xmax-xmin),(vmax-vmin)/(ymax-ymin)); translate(p[i],umin,vmin); } rectangle(umin,vmin,umax,vmax); void copia(point *p1,point *p2,int n){ for(i=0; i<n; i++) p2[i] = p1[i];
{ ... void transW2V(point *p,int n,float xmin,float ymin,float xmax,float ymax,int umin,int vmin,int umax, int vmax){ int i; for(i=0; i<n ; i++){ translate(p[i],-xmin,-ymin); scale(p[i],(umax-umin)/(xmax-xmin),(vmax-vmin)/(ymax-ymin)); translate(p[i],umin,vmin); } rectangle(umin,vmin,umax,vmax); void copia(point *p1,point *p2,int n){ for(i=0; i<n; i++) p2[i] = p1[i];")
61
#include <graphics.h>
#include "transform.h" main(){ initwindow(400,400); point p[10],p1[10]; p[0].x = 0;p[0].y = 10; p[1].x = 10;p[1].y = 10; p[2].x = 10;p[2].y = 0; p[3].x = 20;p[3].y = 0; p[4].x = 20;p[4].y = 10; p[5].x = 30;p[5].y = 10; dibujaPoly(p,6); copia(p,p1,6); transW2V(p1,6,0,0,30,30,100,100,150,150); dibujaPoly(p1,6); transW2V(p1,6,0,0,30,20,200,100,350,300); // setviewport(100,100,200,200,true); // dibujaPoly(p,6); getch(); }
{ initwindow(400,400); point p[10],p1[10]; p[0].x = 0;p[0].y = 10; p[1].x = 10;p[1].y = 10; p[2].x = 10;p[2].y = 0; p[3].x = 20;p[3].y = 0; p[4].x = 20;p[4].y = 10; p[5].x = 30;p[5].y = 10; dibujaPoly(p,6); copia(p,p1,6); transW2V(p1,6,0,0,30,30,100,100,150,150); dibujaPoly(p1,6); transW2V(p1,6,0,0,30,20,200,100,350,300); // setviewport(100,100,200,200,true); // dibujaPoly(p,6); getch(); }")
Presentaciones similares