Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Sistemas de Ecuaciones Diferenciales

2
Sistemas de Ecuaciones Diferenciales
Ecuaciones Diferenciales de orden m>1 Métodos numéricos para sistemas Teoría cualitativa Plano de fases Puntos de equilibrio Estabilidad 2

3
Sistemas de Ecuaciones Diferenciales
Condiciones iniciales

4
Ecuaciones Diferenciales de orden m >1
Condiciones iniciales Cambio de variable Sistema equivalente

5
Ejemplo: movimiento del péndulo
Ley de Newton: ecuación de 2º orden Sistema diferencial de 1er orden y l Resistencia del medio Fuerza externa

6
Ejemplo: circuito eléctrico
Ecuación de 2º orden Sistema diferencial de 1er orden R E(t) L C
 L. C.")
7
Expresión matricial del S.E.D.
Problema de valor inicial siendo,

8
Métodos numéricos para sistemas
function [t,y]=mieuler(a,b,y0,n) m=length(y0); h=(b-a)/n; t=a:h:b; y=zeros(n+1,m); y(1,:)=y0; for k=1:n y(k+1,:)=y(k,:)+h*f(t(k),y(k,:)); end
 m=length(y0); h=(b-a)/n; t=a:h:b; y=zeros(n+1,m); y(1,:)=y0; for k=1:n. y(k+1,:)=y(k,:)+h*f(t(k),y(k,:)); end.")
9
Ecuación del péndulo function z=pendulo(t,y) % z=pendulo(t,y)
% ly"+ky'+g·sen(y) = e(t) % l: longitud, k: resistencia del medio % g: acel. grav., e(t): fuerza externa l=1; k=0; g=9.81; e=0; % Datos z(1)=y(2); % Ecuación z(2)=(e - k*y(2) - g*sin(y(1)))/l;
 = e(t) % l: longitud, k: resistencia del medio. % g: acel. grav., e(t): fuerza externa. l=1; k=0; g=9.81; e=0; % Datos. z(1)=y(2); % Ecuación. z(2)=(e - k*y(2) - g*sin(y(1)))/l;")
10
Péndulo simple no amortiguado!!
5 4 3 2 1 Ángulo Velocidad -1 -2 -3 -4 -5 2 4 6 8 10

11
Teoría cualitativa Sistema de 2 ecuaciones diferenciales
Sistema autónomo Puntos de equilibrio

12
Plano de fases Trayectorias u órbitas Propiedades Unicidad
Trayectorias punto de equilibrio Comportamiento asintótico Órbitas cerradas

13
Plano de fases x=a:h:b; y=c:h:d; [xx,yy] = meshgrid(x,y);
dx = f(xx,yy); dy = g(xx,yy); quiver(xx,yy,dx,dy)
![Plano de fases x=a:h:b; y=c:h:d; [xx,yy] = meshgrid(x,y);](http://slideplayer.es/slide/2350057/8/images/13/Plano+de+fases+x%3Da%3Ah%3Ab%3B+y%3Dc%3Ah%3Ad%3B+%5Bxx%2Cyy%5D+%3D+meshgrid%28x%2Cy%29%3B.jpg "dx = f(xx,yy); dy = g(xx,yy); quiver(xx,yy,dx,dy)")
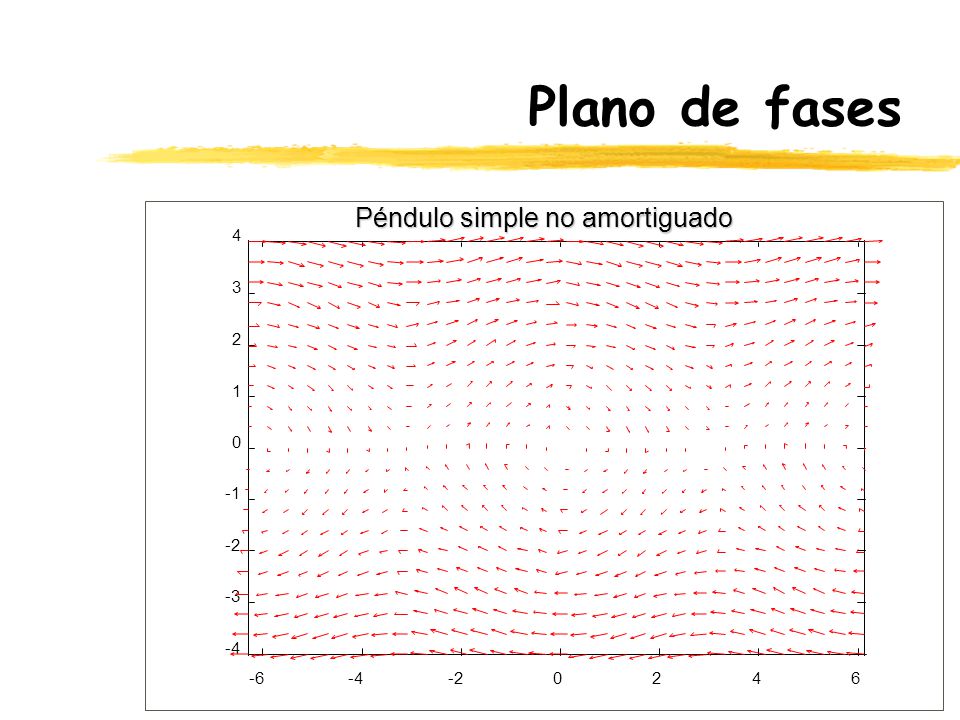
14
Plano de fases Péndulo simple no amortiguado 4 3 2 1 -1 -2 -3 -4 -6 -4
-1 -2 -3 -4 -6 -4 -2 2 4 6
15
Ecuación de van der Pol Ecuación 2º orden Cambio Sistema 1er orden
function z=vanderPol(t,y) k=0.1; z(1)=y(2); z(2)=k*(1-y(1).^2).*y(2)-y(1);
 k=0.1; z(1)=y(2); z(2)=k*(1-y(1).^2).*y(2)-y(1);")
16
Ecuación de van der Pol 4 3 2 1 -1 -2 -3 -4 -4 -3 -2 -1 1 2 3 4

17
Estabilidad Las trayectorias próximas en un instante dado, permanecen siempre próximas. Las trayectorias próximas en un instante dado, no lo están posteriormente. Las trayectorias próximas en un instante dado, están cada vez más próximas.

Presentaciones similares




>")

 ESTÁ SOMETIDO.>")


: Movimiento armónico simple>")





>")



