Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Concepto de Tensión Cuando se aplican fuerzas externas a un cuerpo deformable, el efecto sobre el cuerpo depende de la magnitud de la “intensidad de fuerza”, la que se define como: Intensidad de fuerza = Fuerza aplicada / Área de aplicación de la fuerza La Intensidad de fuerza se denomina Esfuerzo o Tensión.

2
Stress definitions Stress – a measure of force intensity, either within or on the bounding surface of a body subjected to loads Stress - a medical term for a wide range of strong external stimuli, both physiological and psychological

3
Principio de Tensiones de Cauchy We consider a homogeneous, isotropic material body B having a bounding surface S, and a volume V, which is subjected to arbitrary surface forces fi and body forces bi. Let P be an interior point of B and imagine a plane surface S* passing through point P (sometimes referred to as a cutting plane) so as to partition the body into two portions, designated I and II. fifi bibi
 so as to partition the body into two portions, designated I and II. fifi bibi.")
4
Principio de Tensiones de Cauchy Point P is in the small element of area ΔS* of the cutting plane, which is defined by the unit normal pointing in the direction from Portion I into Portion II as shown by the free body diagram of Portion I The internal forces being transmitted across the cutting plane due to the action of Portion II upon Portion I will give rise to a force distribution on ΔS*equivalent to a resultant force Δfi and a resultant moment ΔMi at P.

5
Principio de Tensiones de Cauchy The Cauchy stress principle asserts that in the limit as the area ΔS* shrinks to zero with P remaining an interior point, we obtain:

6
The Stress Tensor (rectangular Cartesian components) We can introduce a rectangular Cartesian reference frame at P, there is associated with each of the area elements dSi (i= 1,2,3) located in the coordinate planes and having unit normals (i = 1,2,3), respectively, a stress vector as shown in figure.
 We can introduce a rectangular Cartesian reference frame at P, there is associated with each of the area elements dSi (i= 1,2,3) located in the coordinate planes and having unit normals (i = 1,2,3), respectively, a stress vector as shown in figure.")
7
The Stress Tensor (rectangular Cartesian components) In terms of their coordinate components these three stress vectors associated with the coordinate planes are expressed by: or using summation convention: This equation expresses the stress vector at P point for a given coordinate plan in terms of its rectangular Cartesian components.
 In terms of their coordinate components these three stress vectors associated with the coordinate planes are expressed by: or using summation convention: This equation expresses the stress vector at P point for a given coordinate plan in terms of its rectangular Cartesian components.")
8
The Stress Tensor (analysis for arbitrary oriented plane) For this purpose, we consider the equilibrium of a small portion of the body in the shape of a tetrahedron having its vertex at P, and its base ABC perpendicular to an arbitrarily oriented normal: The stress vectors shown on the surfaces of the tetrahedron represent average values over the areas on which they act. This is indicated in our notation by an asterisk appended to the stress vector symbols (remember that the stress vector is a point quantity).
..")
9
The Stress Tensor (analysis for arbitrary oriented plane) Equilibrium requires the vector sum of all forces acting on the tetrahedron to be zero, that is, for, Now, taking into consideration area surfaces, volume we can rewrite above:
 Equilibrium requires the vector sum of all forces acting on the tetrahedron to be zero, that is, for, Now, taking into consideration area surfaces, volume we can rewrite above:")
10
The Stress Tensor (analysis for arbitrary oriented plane) Continuación Now, letting the tetrahedron shrink to point P we get : or by defining: The Cauchy stress formula expresses the stress vector associated with the element of area having an outward normal ni at point P in terms of the stress tensor components σji at that point.
 Continuación Now, letting the tetrahedron shrink to point P we get : or by defining: The Cauchy stress formula expresses the stress vector associated with the element of area having an outward normal ni at point P in terms of the stress tensor components σji at that point.")
11
The Stress Tensor We see from the analysis of the tetrahedron element that if we know the stress vectors on the three coordinate planes of any Cartesian system at P, or equivalently, the nine stress tensor components σ ji at that point, we can determine the stress vector for any plane at that point. For computational purposes it is often convenient to express it in the matrix form: t 1 (n) t 2 (n) t 3 (n)
 t 2 (n) t 3 (n).")
12
The Stress Tensor The nine components of σ ij are often displayed by arrows on the coordinate faces of a rectangular parallelepiped, as shown in the figure. In an actual physical body B, all nine stress components act at the single point P. The three stress components shown by arrows acting perpendicular (normal) to there respective coordinate planes and labeled σ 11, σ 22, and σ 33 are called normal stresses. The six arrows lying in the coordinate planes and pointing in the directions of the coordinate axes, namely, σ 12, σ 21, σ 23, σ 32, σ 31, and σ 13 are called shear stresses. Note that, for these, the first subscript designates the coordinate plane on which the shear stress acts, and the second subscript identifies the coordinate direction in which it acts.
 to there respective coordinate planes and labeled σ 11, σ 22, and σ 33 are called normal stresses. The six arrows lying in the coordinate planes and pointing in the directions of the coordinate axes, namely, σ 12, σ 21, σ 23, σ 32, σ 31, and σ 13 are called shear stresses. Note that, for these, the first subscript designates the coordinate plane on which the shear stress acts, and the second subscript identifies the coordinate direction in which it acts..")
13
The Stress Tensor A stress component is positive when its vector arrow points in the positive direction of one of the coordinate axes while acting on a plane whose outward normal also points in a positive coordinate direction. In general, positive normal stresses are called tensile stresses, and negative normal stresses are referred to as compressive stresses. The units of stress are Newtons per square meter (N/m 2 ) in the SI system. One Newton per square meter is called a Pascal, but because this is a rather small stress from an engineering point of view, stresses are usually expressed as mega-Pascals (MPa= 10 6 Pa).
 in the SI system. One Newton per square meter is called a Pascal, but because this is a rather small stress from an engineering point of view, stresses are usually expressed as mega-Pascals (MPa= 10 6 Pa)..")
14
Variación de los componentes del tensor de tensiones al rotar el sistema de ejes coordenados El tensor de tensiones se modifica al rotar los ejes coordenados desde un sistema inicial (x i ) a uno final (x ’ i ); para calcular las “nuevas componentes” en función de las “antiguas componentes” se utiliza la ecuación del cambio de coordenadas de tensores de segundo orden: σ’ ij = l im ·l jn ·σ mn Nuevas Antiguas Donde: l im = cos (eje i – eje m) l jn = cos (eje j – eje n)
 a uno final (x ’ i ); para calcular las nuevas componentes en función de las antiguas componentes se utiliza la ecuación del cambio de coordenadas de tensores de segundo orden: σ’ ij = l im ·l jn ·σ mn Nuevas Antiguas Donde: l im = cos (eje i – eje m) l jn = cos (eje j – eje n)")
15
Ejes principales de tensiones Siempre es posible encontrar un sistema de ejes coordenados ortogonales I, II, III para los cuales las tensiones de corte σ 12, σ 23 y σ 31 sean 0. De esta manera el tensor de tensiones queda expresado en el sistema I, II, III en forma diagonalizada: σ I 0 0 0 σ II 0 0 0 σ III

16
Demostración del método para encontrar direcciones principales del tensor de tensiones Encontrar direcciones principales significa encontrar direcciones en que: t i (ň) // n i De esta manera se suprimen las componentes de corte de t i (ň) sobre el plano cuya normal es n i n i no es dirección principalni es dirección principal
 // n i De esta manera se suprimen las componentes de corte de t i (ň) sobre el plano cuya normal es n i n i no es dirección principalni es dirección principal")
17
Demostración del método para encontrar direcciones principales del tensor de tensiones The determination of principal stress values and principal stress directions follows precisely the procedure for determining principal values and principal directions of any symmetric second-order tensor. Usando la identidad: Los términos de σ ji son conocidos; n j son las componentes desconocidas de una dirección principal Una dirección será principal de tensiones si t i (ň) = σ·n i ; porque la tensión será paralela a la normal al plano y no dará componentes de corte. De esta manera se cumplirá la ecuación: σ ji ·n j – σ·n i = 0 Usando la propiedad de sustitución del delta de Kronecker: σ ji ·n j – σ· δ ij · n j = 0 ; (σ ji – σ·δ ij )·n j =0 (*) Para que las tres anteriores ecuaciones en n j no sean trivialmente cero, el determinante debe ser cero: | σ ji - σ·δ ij | = 0
 = σ·n i ; porque la tensión será paralela a la normal al plano y no dará componentes de corte. De esta manera se cumplirá la ecuación: σ ji ·n j – σ·n i = 0 Usando la propiedad de sustitución del delta de Kronecker: σ ji ·n j – σ· δ ij · n j = 0 ; (σ ji – σ·δ ij )·n j =0 (*) Para que las tres anteriores ecuaciones en n j no sean trivialmente cero, el determinante debe ser cero: | σ ji - σ·δ ij | = 0.")
18
Este determinante puede expandirse de la siguiente manera, lo que en definitiva da una ecuación cúbica en σ (llamada “equación característica del tensor de tensiones”: (σ 11 - σ) σ 12 σ 13 σ 12 (σ 22 - σ) σ 23 =0 σ 13 σ 23 (σ 33 - σ) whose roots σ(I), σ(II), σ(III) are the principal stress values of σij. The coefficients I,, II, III are known as the first, second, and third invariants, respectively, of σij and may be expressed in terms of its components by:

19
Invariantes y tensiones principales Los términos :I, II, III se denominan invariantes porque no varían al girar el sistema de referencias. Por consiguiente las tensiones principales σ (I), σ (II), σ (III) son únicas para un determinado estado de tensiones. Se debe recordar que por razones de equilibrio del elemento de volumen dV, σ ij = σ ji
, σ (II), σ (III) son únicas para un determinado estado de tensiones. Se debe recordar que por razones de equilibrio del elemento de volumen dV, σ ij = σ ji.")
20
Normal and Shear Stress Components The stress vector on an arbitrary plane at P may be resolved into a component normal to the plane having a magnitude σ N, along with a shear component which acts in the plane and has a magnitude σ S, as shown in figure. (Here, σ N and σ S are not vectors, but scalar magnitudes of vector components. Clearly, from this figure, it is seen that σ N is given by the dot product, and in as much as, it follows that:

21
Normal and Shear Stress Components (Continuation) Also, from the geometry of decomposition, we get:
 Also, from the geometry of decomposition, we get:")
22
Componentes de las direcciones principales Las 3 componentes de cada una de las direcciones principales de tensión ( n j I ; n j II ; n j III ) se calculan utilizando los 3 valores de σ (σ I ; σ II ; σ III ) y utilizando las siguientes ecuaciones tomadas de la ecuación (*): σ ji ·n i I = σ I ·n j I σ ji ·n i II = σ II ·n j II σ ji ·n i III = σ II ·n j III Para todas las direcciones principales: n 1 2 + n 2 2 + n 3 3 = 1 Porque es un vector unitario.
 se calculan utilizando los 3 valores de σ (σ I ; σ II ; σ III ) y utilizando las siguientes ecuaciones tomadas de la ecuación (*): σ ji ·n i I = σ I ·n j I σ ji ·n i II = σ II ·n j II σ ji ·n i III = σ II ·n j III Para todas las direcciones principales: n n n 3 3 = 1 Porque es un vector unitario.")
23
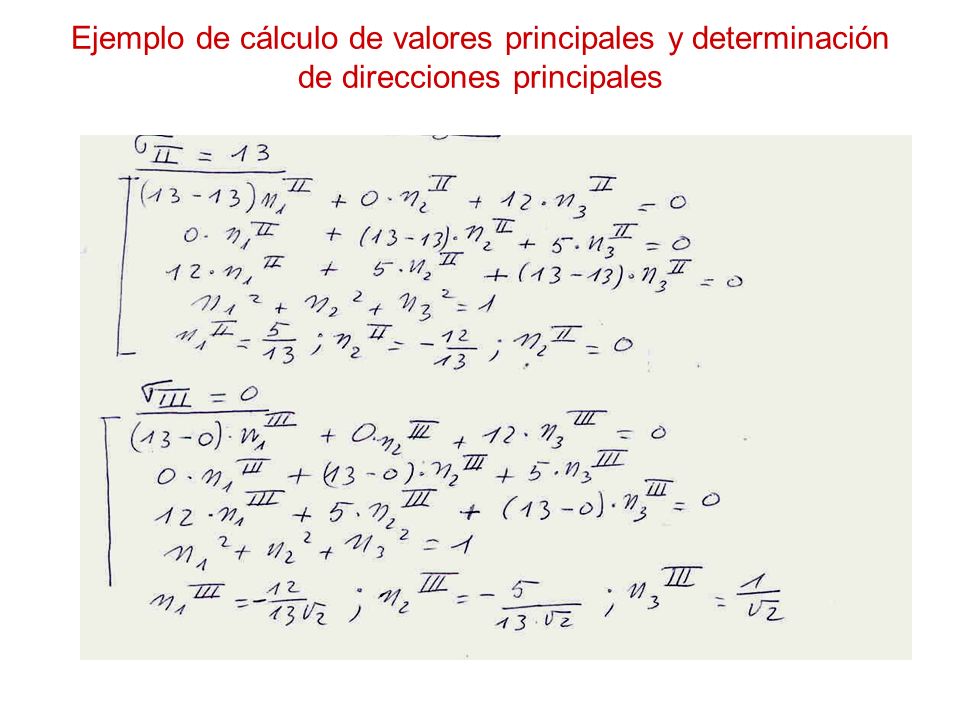
Ejemplo de cálculo de valores principales y determinación de direcciones principales (13 - σ)
")
24
Ejemplo de cálculo de valores principales y determinación de direcciones principales

26
Ejemplo de cálculo de tracción normal en un plano cualquiera

27
Círculo de Mohr Si se sabe que la direción 3=3’ es principal, entonces: σ ’ 13 = σ’ 23 =0 Ejes: 1’,2’, 3’= ejes antiguos; 1,2,3 = ejes nuevos El tensor de cosenos de los ángulos entre los dos sistemas de ejes (a ik ) es: cos θ senθ 0 a ik = - sen θ cosθ 0 0 0 1
 es: cos θ senθ 0 a ik = - sen θ cosθ")
28
Círculo de Mohr Reglas de transformación del tensor de tensiones: σ ij = a im · a jn · σ’ mn (nuevas) (antiguas) σ 11 = a 1m ·a 1n · σ’ mn = cos 2 θ·σ’ 11 + 2·senθ·cosθ·σ’ 12 + sen 2 θ·σ’ 22 Mediante operaciones algebraicas la ecuación anterior se puede transformar en: σ 11 = (σ’ 11 + σ’ 22 )/2 + [cos2θ·(σ’ 11 – σ’ 22 )] /2 + sen2θ· σ’ 12
![Círculo de Mohr Reglas de transformación del tensor de tensiones: σ ij = a im · a jn · σ’ mn (nuevas) (antiguas) σ 11 = a 1m ·a 1n · σ’ mn = cos 2 θ·σ’ ·senθ·cosθ·σ’ 12 + sen 2 θ·σ’ 22 Mediante operaciones algebraicas la ecuación anterior se puede transformar en: σ 11 = (σ’ 11 + σ’ 22 )/2 + [cos2θ·(σ’ 11 – σ’ 22 )] /2 + sen2θ· σ’ 12](http://images.slideplayer.es/34/10514792/slides/slide_28.jpg "Círculo de Mohr Reglas de transformación del tensor de tensiones: σ ij = a im · a jn · σ’ mn (nuevas) (antiguas) σ 11 = a 1m ·a 1n · σ’ mn = cos 2 θ·σ’ ·senθ·cosθ·σ’ 12 + sen 2 θ·σ’ 22 Mediante operaciones algebraicas la ecuación anterior se puede transformar en: σ 11 = (σ’ 11 + σ’ 22 )/2 + [cos2θ·(σ’ 11 – σ’ 22 )] /2 + sen2θ· σ’ 12")
29
Círculo de Mohr σ 22 = a 2m ·a 2n · σ ’ mn = sen 2 θ·σ’ 11 – 2·senθ· cosθ·σ’ 12 + cos 2 θ·σ’ 22 Esta ecuación también puede ser transformada en: σ 22 = (σ’ 11 +σ’ 22 )/2 - [cos2θ·(σ’ 11 – σ’ 22 )]/2 – sen2θ·σ’ 22 Finalmente: σ 12 = a 1m · a 2n · σ’ mn = cos 2 θ·σ’ 12 - sen 2 θ·σ’ 21 + senθ·cosθ·(σ’ 22 -σ 11 ) Transformando esta ecuación se tiene: σ 12 = cos2θ·σ’ 12 + [sen2θ·(σ’ 22 – σ’ 11 )]/2
![Círculo de Mohr σ 22 = a 2m ·a 2n · σ ’ mn = sen 2 θ·σ’ 11 – 2·senθ· cosθ·σ’ 12 + cos 2 θ·σ’ 22 Esta ecuación también puede ser transformada en: σ 22 = (σ’ 11 +σ’ 22 )/2 - [cos2θ·(σ’ 11 – σ’ 22 )]/2 – sen2θ·σ’ 22 Finalmente: σ 12 = a 1m · a 2n · σ’ mn = cos 2 θ·σ’ 12 - sen 2 θ·σ’ 21 + senθ·cosθ·(σ’ 22 -σ 11 ) Transformando esta ecuación se tiene: σ 12 = cos2θ·σ’ 12 + [sen2θ·(σ’ 22 – σ’ 11 )]/2](http://images.slideplayer.es/34/10514792/slides/slide_29.jpg "Círculo de Mohr σ 22 = a 2m ·a 2n · σ ’ mn = sen 2 θ·σ’ 11 – 2·senθ· cosθ·σ’ 12 + cos 2 θ·σ’ 22 Esta ecuación también puede ser transformada en: σ 22 = (σ’ 11 +σ’ 22 )/2 - [cos2θ·(σ’ 11 – σ’ 22 )]/2 – sen2θ·σ’ 22 Finalmente: σ 12 = a 1m · a 2n · σ’ mn = cos 2 θ·σ’ 12 - sen 2 θ·σ’ 21 + senθ·cosθ·(σ’ 22 -σ 11 ) Transformando esta ecuación se tiene: σ 12 = cos2θ·σ’ 12 + [sen2θ·(σ’ 22 – σ’ 11 )]/2")
30
Círculo de Mohr Si se elevan al cuadrado las ecuaciones para σ 11 σ 22 y σ 12 y se suman, se tiene: [σ 11 – (σ’ 11 + σ’ 22 )/2] 2 + σ 2 12 = [(σ’ 11 – σ’ 22 )/2] 2 + σ’ 12 2 Esta es la ecuación de un círculo de centro en: [(σ’ 11 + σ’ 22 )/2, 0] o [(σ 11 + σ 22 )/2, 0] Cuyo radio es: [{(σ’ 11 - σ’ 22 )/2} 2 + σ ’ 12 2 ] 1/2 o [{(σ 11 - σ 22 )/2} 2 + σ 12 2 ] 1/2 Esta representación es la del conocido Círculo de Mohr, que se muestra en la Fig. 2.7
![Círculo de Mohr Si se elevan al cuadrado las ecuaciones para σ 11 σ 22 y σ 12 y se suman, se tiene: [σ 11 – (σ’ 11 + σ’ 22 )/2] 2 + σ 2 12 = [(σ’ 11 – σ’ 22 )/2] 2 + σ’ 12 2 Esta es la ecuación de un círculo de centro en: [(σ’ 11 + σ’ 22 )/2, 0] o [(σ 11 + σ 22 )/2, 0] Cuyo radio es: [{(σ’ 11 - σ’ 22 )/2} 2 + σ ’ 12 2 ] 1/2 o [{(σ 11 - σ 22 )/2} 2 + σ 12 2 ] 1/2 Esta representación es la del conocido Círculo de Mohr, que se muestra en la Fig.](http://images.slideplayer.es/34/10514792/slides/slide_30.jpg "2.7.")
31
Círculos de Mohr en dos y en tres dimensiones

32
Mohr’s Circles for Stress B. NOWAK, Stress – Principles…., CASA Seminar, 8 th March 2006 Graphical interpretation

33
Plane Stress B. NOWAK, Stress – Principles…., CASA Seminar, 8 th March 2006

34
Círculos de Mohr El círculo de Mohr se construye de la siguiente manera: -σ’ 11 ; σ 11 ; σ’ 22 ; σ 22 se grafican en la abscisa, la tracción es (+) y la compresión es (-) -Las tensiones de corte σ 12 se grafican en la ordenada. Si σ 12 tiende a girar el elemento ΔV en el sentido de los punteros del reloj es (+), si lo gira contra los punteros del reloj es (-). -Las tensiones principales σ I σ II están sobre el eje de las abscisas cuando σ 12 =0. -Un giro real de ángulo θ de los ejes corresponde a un giro de 2θ en el círculo de Mohr.
, si lo gira contra los punteros del reloj es (-). -Las tensiones principales σ I σ II están sobre el eje de las abscisas cuando σ 12 =0. -Un giro real de ángulo θ de los ejes corresponde a un giro de 2θ en el círculo de Mohr..")
35
Círculos de Mohr Tal como se efectuaron rotaciones en torno al eje principal 3, se pueden hacer rotaciones en torno a los ejes principales 1 y 2, obteniéndose así 3 círculos de Mohr, como se muestran en la Fig 2.8. El mayor de los círculos de Mohr será importante como criterio de fluencia plástica, según el criterio de fluencia de Tresca.

Presentaciones similares




. When we ask what time it is in Spanish, we say “¿Qué hora es?” Some people also say “¿Qué horas son?”>")









 commands and formal (Ud./Uds.) commands. You will now learn nosotros/as.>")




 of verbs: those that end in –AR, those that end in –ER, and those that end in –IR. This.>")