Descargar la presentación
La descarga está en progreso. Por favor, espere

1
TECNOLÓGICO NACIONAL DE MÉXICO Instituto Tecnológico de Comitancillo INSTITUTO TECNOLOGICO DE COMITANCILLO SENSORIZACION Y CONTROL DE ROBOT MOVILES DR. JULIO CESAR DEHESA VALENCIA Mail: julio_cesar_d@hotmail.com 19-30 DE ENERO DE 2015

2
I. Características y operación de tarjetas de control 1.1 Características de la tarjeta de control 1.2 Puertos 1.3 Electrónica para control de robots móviles 1.4 Técnicas de control de robots móviles II. Sensores y actuadores 2.1 Tipos de sensores 2.2 Sensores aplicados a robótica móvil 2.3 Tipos de actuadores 2.4 Desarrollo de aplicaciones de automatización

3
III. Tecnología inalámbrica en robótica móvil 3.1 Radiofrecuencia 3.2 Infrarrojo 3.3 Bluetooh 3.4 Zigbee 3.5 wifi IV. Comunicación de robots móviles 4.1 Técnicas de comunicación de robots móviles 4.2 Coordinación de robots móviles 4.3 Cooperación de robots móviles

4
TEMAS A PRESENTAR: IMPORTANCIA DE LOS ROBOTS MOVILES DEFINICION, ESTRUCTURA Y CLASIFICACION. COMPONENTES O ELEMENTOS PARA LA COMUNICACIÓN DE ROBOTS MOVILES ACTUADORES, TARJETA ARDUINO, SERVOMOTOR, SHIELD, PUENTE H, SENSOR ULTRASONICO, SISTEMA DE ALIMENTACION. PROGRAMACION

5
IMPORTANCIA DE LOS ROBOTS MOVILES DEFINICION Un robot móvil es una máquina automática que es capaz de trasladarse en cualquier ambiente dado. Hay distintos tipos de robots móviles: Ruedas. Se utilizan sobre superficies lisas. Orugas. Se emplean sobre superficies irregulares Patas. Se usan para superficies muy irregulares

6
CLASIFICACION Y APLICACIONES DE LOS ROBOTS MOVILES En la actualidad los más comunes son: Robots manipuladores: Limitación para moverse en su entorno. Robots móviles: Capacidad de moverse por el entorno que les rodea. Según el medio por el que se desplazan: Terrestres: Fácil de implementar, se basan en conceptos mecánicos ya probados. Aéreos: Principalmente estudiados en investigaciones militares Aviones de exploración autónomos, climatológicos, etc. Acuáticos: Operan en la superficie o por debajo de ella impulsados comúnmente por hélices o turbinas. Espaciales: su objetivo es navegar o realizar una acción en el espacio exterior.

7
ESTRUCTURA Debido a que un robot móvil por lo general esta destinado a simular el comportamiento de persona y animales con un nivel de eficiencia similar, la estructura del robot móvil es muy similar a la estructura al del ser vivo. Se puede apreciar la estructura del robot móvil y del ser vivo en la figura, en donde se puede observar la manera general la estructura, tanto de un robot móvil como de un ser vivo.

8
COMPONENTES O ELEMENTOS PARA LA COMUNICACIÓN DE ROBOTS MOVILES ACTUADORES Son los Encargados de Dotar de Movimiento a la Estructura Mecánica, existen Diferentes Tipos dependiendo de la Tecnología, en muchos casos se utilizan los motores. FUNCIÓN Es convertir señales de mando en movimientos con una potencia de actuación con las Tareas que tenga encomendadas hacia los Motores para crear movimientos en las articulaciones de los robots.

9
MOTORES DC El motor de corriente continua (denominado también motor de corriente directa, motor CC o motor DC ) es una máquina que convierte la energía eléctrica en mecánica, provocando un movimiento rotatorio, gracias a la acción del campo magnético. Los motores tienen polaridad en sus patas, es decir, dependiendo de cuál de ellas conectemos al polo positivo y cuál al negativo de una pila, tendremos giro en un sentido o en otro.

10
SERVOMOTOR Un servomotor es un motor que puede poner su eje en una determinada posición a través de una señal eléctrica de control, de esta manera modificado el valor de la señal el servo se puede posicionar en cualquier ángulo en un rango de 0° a 45°, 0° a 90°, 0° a 180°, 0° a 210° (dependiendo del tipo y modelo de la marca) Un servomotor tiene un circuito de control y un potenciómetro (resistencia variable)está conectada al eje central del motor este potenciómetro permite a la circuitería de control, supervisar el ángulo actual del servomotor, Normalmente la señal se controla con PWM, o sea pulsos de ancho modular, con los que podemos mover con precisión el servomotor a cualquier punto de su radio de acción. La interfaz de conexión del servomotor consta normalmente de 3 cables o conductores, generalmente de 3 colores distintos a saber: -Rojo -Marrón o Negro -Azul, Amarillo u otros

11
SENSOR ULTRASONICO El HC-SR04 es un sensor ultrasónico, este se utiliza para determinar la distancia a un objeto. Ofrece una precisión excelente y lecturas estables. Su funcionamiento no se ve afectado por la luz solar o materiales obscuros. En este caso vamos a utilizarlo para la medición de distancias. Esto lo consigue enviando un ultrasonido (inaudible para el oído humano por su alta frecuencia) a través de uno de la pareja de cilindros que compone el sensor (un transductor) y espera a que dicho sonido rebote sobre un objeto y vuelva, retorno captado por el otro cilindro El sensor consta de 4 pines: "VCC" conectado a la salida de 5V de la placa, "Trig" conectado al pin digital de la placa encargado de enviar el pulso ultrasónico, "Echo" al pin de entrada digital que recibirá el eco de dicho pulso y "GND" a tierra.
 a través de uno de la pareja de cilindros que compone el sensor (un transductor) y espera a que dicho sonido rebote sobre un objeto y vuelva, retorno captado por el otro cilindro El sensor consta de 4 pines: VCC conectado a la salida de 5V de la placa, Trig conectado al pin digital de la placa encargado de enviar el pulso ultrasónico, Echo al pin de entrada digital que recibirá el eco de dicho pulso y GND a tierra..")
12
TARJETA ARDUINO Arduino es una plataforma de electrónica abierta para la creación de prototipos basada en software y hardware flexibles y fáciles de usar. Se creó para artistas, diseñadores, aficionados y cualquiera interesado en crear entornos u objetos interactivos. Arduino puede tomar información del entorno a través de sus pines de entrada de toda una gama de sensores y puede afectar aquello que le rodea controlando luces, motores y otros actuadores. El microcontrolador en la placa Arduino se programa mediante el lenguaje de programación Arduino (basasdo en Wiring) y el entorno de desarrollo Arduino (basado en Processing). Los proyectos hechos con Arduino pueden ejecutarse sin necesidad de conectar a un ordenador, si bien tienen la posibilidad de hacerlo y comunicar con diferentes tipos de programas (p.ej. Flash).lenguaje de programación ArduinoWiringProcessing
 y el entorno de desarrollo Arduino (basado en Processing). Los proyectos hechos con Arduino pueden ejecutarse sin necesidad de conectar a un ordenador, si bien tienen la posibilidad de hacerlo y comunicar con diferentes tipos de programas (p.ej. Flash).lenguaje de programación ArduinoWiringProcessing.")
13
En la robótica, podemos usar Arduino de 2 formas: Arduino usarse como "cerebro" de nuestro robot, ejerciendo de controlador y coordinador del resto de partes del robot. Si queremos usar un ordenador más potente (o un portátil) como cerebro, Arduino puede servir como interfaz de control entre el ordenador y el resto de partes del robot.
 como cerebro, Arduino puede servir como interfaz de control entre el ordenador y el resto de partes del robot..")
14
Esta placa escudo enchufa en la parte superior de un Arduino y hace que sea fácil de conectar a todas las entradas y salidas digitales y las entradas analógicas. SENSOR SHIELD PARA ARDUINO El Arduino Sensor Shield V5.0 permite ser pinchado directamente a una placa Arduino y facilitar la conexión de diferentes módulos, como sensores, relés, servos, botones, potenciómetros y más. También posee una gama variada de conexiones para facilitar la conexión ordenada de dispositivos a la placa Arduino.

15
PUENTE H L298D (CONTROL DE MOTORES) Un Puente H, o Puente en H, es un circuito electrónico que permite a un motor eléctrico DC girar en ambos sentidos, avance y retroceso. Son ampliamente usados en robótica y como convertidores de potencia. Los puentes H están disponibles como circuitos integrados, pero también pueden construirse a partir de componentes discretos. Como hemos dicho el puente H se usa para invertir el giro de un motor, pero también puede usarse para frenarlo (de manera brusca), o incluso puede usarse para permitir que el motor frene bajo su propia inercia, cuando desconectamos el motor de la fuente que lo alimenta.
, o incluso puede usarse para permitir que el motor frene bajo su propia inercia, cuando desconectamos el motor de la fuente que lo alimenta..")
16
El integrado L293D incluye cuatro circuitos para manejar cargas de potencia media, en especial pequeños motores y cargas inductivas, con la capacidad de controlar corriente. Los circuitos individuales se pueden usar de manera independiente para controlar cargas de todo tipo y, en el caso de ser motores, manejar un único sentido de giro. Pero además, cualquiera de estos cuatro circuitos sirve para configurar la mitad de un puente H. El integrado permite formar, entonces, dos puentes H completos, con los que se puede realizar el manejo de dos motores. CIRCUITO INTEGRADO L293D (CONTROL DE MOTORES)
.")
17
PUENTE H L293B (CONSTRUIDO CON TRANSISTORES DE JUNTURA BIPOLAR BJT)
")
18
SISTEMA DE ALIMENTACION Para la fabricación de nuestros robots se puede utilizar cualquier tipo de alimentación, ya sean pilas alcalinas o baterías recargables en cualquiera de sus modalidades. Lo que hay que tener en cuenta son los principales parámetros de cada tipo de batería, ya que todas ellas tienen diferentes características. De esta manera podremos elegir la batería que mejor se adapta a nuestra aplicación. Nuestro robot utilizan una alimentación de 5V que pasa por el Arduino mandándolo al Arduino sensor Shield, mientras que los motores los podemos alimentar a una tensión algo mayor (los motores DC se alimentan a 5V desde el puente H, aunque aguantan algo más). Teniendo en cuenta todo esto, para los robots se utilizara las baterías Li-Po, principalmente por su poco peso y alta intensidad (Amperaje). En concreto, utilizaremos baterías Li-Po de 1000mAh y dos elementos, lo que proporcionará una tensión nominal de
. Teniendo en cuenta todo esto, para los robots se utilizara las baterías Li-Po, principalmente por su poco peso y alta intensidad (Amperaje). En concreto, utilizaremos baterías Li-Po de 1000mAh y dos elementos, lo que proporcionará una tensión nominal de.")
19
Programación

20
Declaración de los tipos de variables y pines que se utilizaran en el Arduino.

21
Void Setup (): se invoca una sola vez cuando el programa empieza. Se utiliza para inicializar los modos de trabajo de los pins, o el puerto serie. Debe ser incluido en un programa aunque no haya declaración que ejecutar. Serial.begin(): Abre el puerto serie y fija la velocidad en baudios para la transmisión de datos en serie. El valor típico de velocidad para comunicarse con el ordenador es 9600, aunque otras velocidades pueden ser soportadas.
: Abre el puerto serie y fija la velocidad en baudios para la transmisión de datos en serie. El valor típico de velocidad para comunicarse con el ordenador es 9600, aunque otras velocidades pueden ser soportadas..")
22
Void loop (): Después de llamar a setup(), la función loop() hace precisamente lo que sugiere su nombre, se ejecuta de forma cíclica, lo que posibilita que el programa este respondiendo continuamente ante los eventos que se produzcan en la tarjeta
: Después de llamar a setup(), la función loop() hace precisamente lo que sugiere su nombre, se ejecuta de forma cíclica, lo que posibilita que el programa este respondiendo continuamente ante los eventos que se produzcan en la tarjeta")
23
Fragmento del código del servomotor

24
Fragmento del código del sensor ultrasónico Se crea una función llamado void detection() para el uso del sensor ultrasónico en donde se realizara los algoritmos.
 para el uso del sensor ultrasónico en donde se realizara los algoritmos.")
25
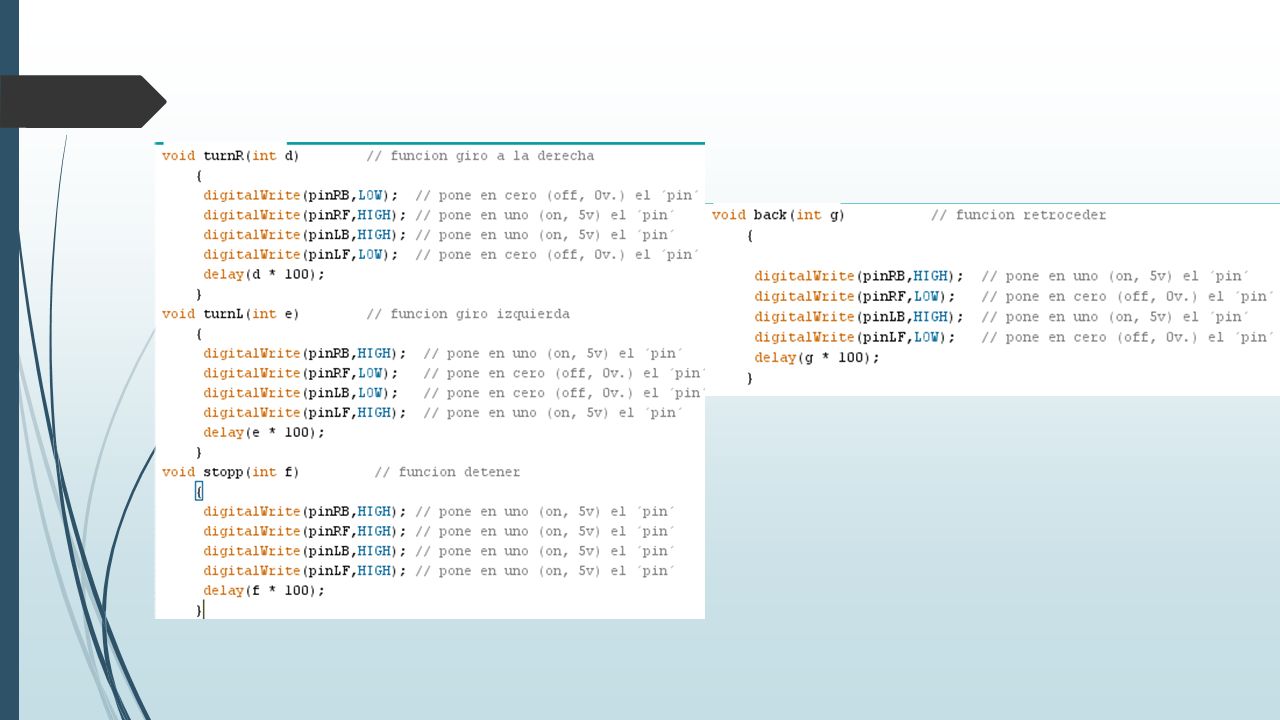
Rutina del giro Se crean 7 funciones: 1.- avanzar 2.- función derecha 3.- función izquierda 4.-función giro derecha 5.- función giro izquierda 6.-detener 7.- retroceder

27
REFERENCIAS http://es.wikipedia.org/wiki/Robot_m%C3%B3vil https://sites.google.com/site/4esoroboticalaunion/5-robots-moviles http://erodriguez.uagro.mx/archivos/ir07_s2.pdf http://proton.ucting.udg.mx/materias/robotica/r166/r68/r68.htm http://es.wikipedia.org/wiki/Motor_de_corriente_continua http://www.info-ab.uclm.es/labelec/solar/electronica/elementos/servomotor.htm http://proyectoarduino.wordpress.com/%C2%BFque-es-arduino/ http://www.arduino.cc/es/pmwiki.php?n= http://arduinocomponent.blogspot.mx/2013/12/arduino-sensor-shield-v-50.html http://www.manuelvillasur.com/2012/10/driver-l293d-de-texas-instruments.html

Presentaciones similares
>")


















